Автор: Денис Аветисян
Новая архитектура UniUGP объединяет ключевые этапы автономного вождения в единый процесс, обеспечивая более надежное и предсказуемое поведение.
Исследователи представили унифицированную платформу, объединяющую понимание сцены, генерацию видео будущего и планирование траектории для беспилотных автомобилей.
Несмотря на значительный прогресс, системы автономного вождения по-прежнему испытывают трудности в нештатных ситуациях из-за недостаточного понимания динамики окружающего мира. В данной работе представлена архитектура UniUGP: Unifying Understanding, Generation, and Planing For End-to-end Autonomous Driving, объединяющая понимание сцены, генерацию прогнозов будущего и планирование траектории в единую систему. Предложенный подход использует гибридную архитектуру экспертов и многоэтапную стратегию обучения для повышения производительности и интерпретируемости, а также улучшения обобщающей способности в сложных сценариях. Сможет ли унифицированный подход к моделированию мира и принятию решений приблизить нас к созданию действительно автономных транспортных средств?
Долгая дорога к надежности: вызовы автономного вождения
Современные системы автономного вождения сталкиваются с серьезными трудностями при обработке редких и сложных дорожных ситуаций, формирующих так называемый «длинный хвост» данных. Этот «хвост» представляет собой совокупность необычных сценариев, которые встречаются нечасто, но требуют от системы способности к адаптации и принятию решений в условиях неопределенности. Простое распознавание образов, эффективное в стандартных ситуациях, оказывается недостаточным для адекватной реакции на такие случаи, как внезапное появление препятствия, неблагоприятные погодные условия или нестандартное поведение других участников движения. Для обеспечения безопасности и надежности автономного вождения необходимы алгоритмы, способные к обобщению опыта и прогнозированию поведения в условиях ограниченной информации, что требует принципиально новых подходов к машинному обучению и искусственному интеллекту.
Существующие методы автономного вождения часто демонстрируют ограниченную способность к обобщению за пределы стандартных, часто встречающихся ситуаций на дороге. Это требует колоссальных усилий по сбору и разметке данных для каждого, даже самого редкого, граничного случая — от неожиданного появления пешехода в неустановленном месте до нетипичных погодных условий. Такой подход не только чрезвычайно затратен, но и не масштабируем, поскольку количество потенциальных “краевых” сценариев практически бесконечно. В результате, системы оказываются уязвимыми в ситуациях, не представленных в обучающей выборке, что существенно ограничивает их надежность и безопасность в реальных дорожных условиях. Необходимы принципиально новые подходы, позволяющие системам самостоятельно адаптироваться к непредсказуемости дорожной обстановки и эффективно справляться с ранее невиданными ситуациями.
UniUGP: унифицированный подход к интеллекту вождения
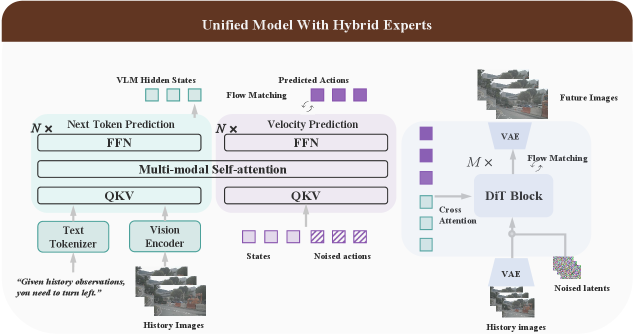
Фреймворк UniUGP представляет собой интегрированную систему для автономной навигации, объединяющую восприятие визуальной информации и лингвистический анализ с планированием траектории и генерацией видео. Данный подход позволяет системе не только интерпретировать окружающую среду посредством анализа изображений и текстовых команд, но и прогнозировать развитие событий, планировать оптимальный маршрут и визуализировать предполагаемый ход движения. Интеграция этих компонентов обеспечивает более надежное и адаптивное поведение в сложных и динамичных условиях, что критически важно для эффективной автономной навигации.
В UniUGP для формирования комплексного понимания дорожной обстановки используется комбинация сквозной модели визуально-языкового восприятия (VLA) и прогностической модели мира. Модель VLA обрабатывает визуальную информацию с камер и лингвистические данные, обеспечивая перцептивное понимание окружения. Прогностическая модель мира, основываясь на текущем состоянии и исторических данных, предсказывает будущие сценарии развития событий, такие как траектории движения других участников дорожного движения и изменения в окружающей среде. Объединение этих двух моделей позволяет UniUGP не только воспринимать текущую ситуацию, но и прогнозировать ее развитие, что критически важно для принятия обоснованных решений в процессе автономной навигации и обеспечения безопасности.
В архитектуре UniUGP используется гибридная экспертная система, основанная на Mixture-of-Transformers (MoT). MoT позволяет эффективно специализировать различные части модели для выполнения конкретных подзадач, таких как распознавание объектов, прогнозирование траекторий и планирование маршрута. Вместо использования одной большой модели, MoT использует несколько «экспертов» — отдельных трансформеров, каждый из которых обучен для определенной задачи. Маршрутизатор динамически выбирает наиболее подходящего эксперта или комбинацию экспертов для обработки каждого входного сигнала, что значительно повышает эффективность и снижает вычислительные затраты по сравнению с монолитными моделями. Такой подход позволяет достичь более высокой точности и скорости работы в сложных сценариях автономной навигации.
Обучение на неожиданностях: четырехэтапная стратегия
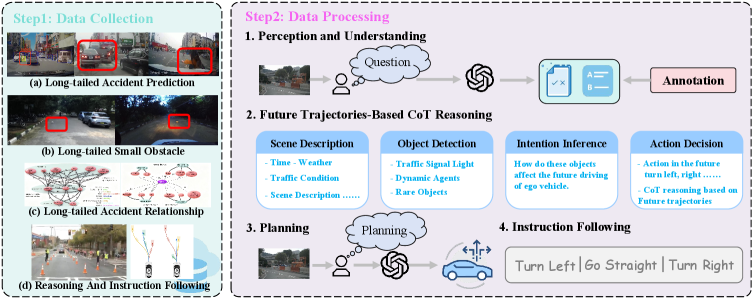
Для обучения системы автономного вождения используется четырехэтапная стратегия, основанная на использовании разнородных наборов данных. В качестве источников информации применяются Waymo Open Dataset, предоставляющий обширные данные реальных поездок; DADA2000, включающий сложные дорожные сценарии; Lost and Found, содержащий информацию об объектах, потерянных на дороге; и StreetHazards, специализирующийся на опасных ситуациях и препятствиях. Комбинация этих наборов данных позволяет системе быть подвергнутой воздействию широкого спектра дорожных ситуаций, что способствует повышению ее устойчивости и способности к обобщению, особенно в отношении редких и непредсказуемых сценариев.
Стратегия обучения направлена на решение проблемы данных “длинного хвоста”, представляющих собой редкие, но критически важные сценарии, которые недостаточно представлены в стандартных обучающих наборах. Недостаточное количество примеров таких сценариев ограничивает способность системы к обобщению и корректной работе в новых, ранее не встречавшихся ситуациях. Использование разнообразных наборов данных, включающих Waymo Open Dataset, DADA2000, Lost and Found и StreetHazards, позволяет значительно увеличить представленность редких событий, тем самым повышая устойчивость и надежность системы в условиях реальной эксплуатации. Это приводит к улучшению обобщающей способности модели и снижению вероятности ошибок при столкновении с нетипичными дорожными ситуациями.
Для повышения прогностических возможностей системы используются методы Flow Matching для предсказания траекторий и Diffusion Models для генерации реалистичного видео. В результате применения данных технологий достигнута точность распознавания небольших объектов на уровне 89.3%, а также 74% точность в понимании взаимосвязей, предшествующих аварийным ситуациям. Данные показатели демонстрируют эффективность применяемых методов в задачах прогнозирования и анализа сложных дорожных сценариев.
За пределами предсказаний: генерация реалистичных сценариев вождения
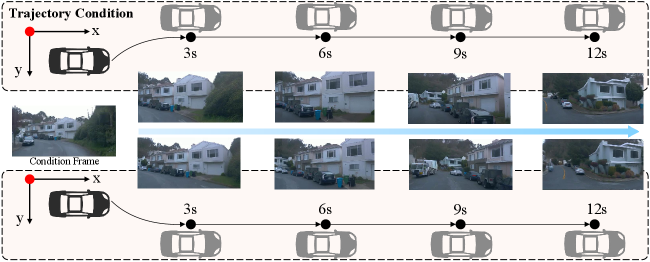
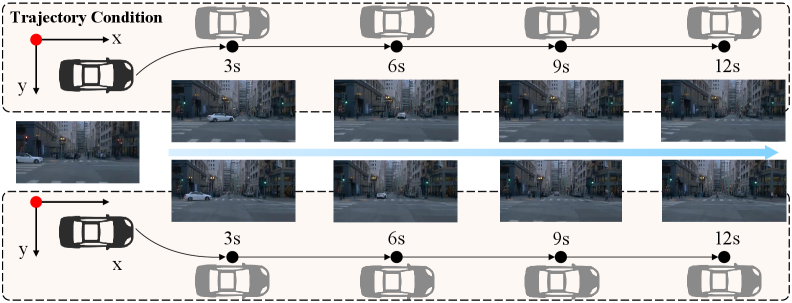
Система UniUGP демонстрирует впечатляющие возможности по генерации реалистичных видеороликов дорожной обстановки, используя методы вариационного автоэнкодера (VAE) для создания синтетических сценариев. Оценка качества сгенерированных видео осуществляется с помощью метрики Fréchet Inception Distance (FID), позволяющей количественно оценить сходство с реальными изображениями. Эта технология позволяет создавать обширные наборы данных для обучения и тестирования систем автономного вождения, особенно в тех случаях, когда получение реальных данных затруднено или требует значительных ресурсов. Возможность генерировать разнообразные и правдоподобные дорожные ситуации открывает новые перспективы для повышения надежности и безопасности беспилотных транспортных средств, а также для решения проблемы нехватки данных в сложных и редких случаях.
Использование синтетических данных, генерируемых UniUGP, играет ключевую роль в повышении надежности и устойчивости систем автономного вождения, особенно в сложных и редких ситуациях на дороге. Недостаток реальных данных для обучения в таких сценариях, как внезапное появление препятствий или неблагоприятные погодные условия, традиционно является серьезной проблемой. UniUGP эффективно решает эту задачу, демонстрируя высокую точность планирования траектории — всего $1.23$ метра в среднем, что измеряется с помощью L2 Distance. При этом вероятность возникновения столкновений составляет лишь $0.33\%$, что значительно превосходит показатели других сравниваемых методов и подтверждает эффективность подхода к увеличению объема обучающих данных посредством синтеза.
Внедрение логики «цепочки рассуждений» значительно улучшило способность системы к объяснению принимаемых решений и повысило качество планирования. Система демонстрирует высокий уровень логического мышления, достигая оценки в 0.88 по шкале GPT для CoT рассуждений. Кроме того, в ходе оценки с использованием DriveLM GVQA, система показала результат 0.59, превзойдя показатели FSDrive (0.57) и OmniDrive (0.56). Такой подход позволяет не только генерировать реалистичные сценарии вождения, но и предоставлять четкое обоснование каждого действия, что критически важно для повышения доверия и безопасности автономных систем.

Исследование UniUGP, стремящееся объединить понимание сцены, генерацию видео и планирование траектории, закономерно вызывает скепсис. Авторы, конечно, увлеченно рассказывают о гибридной архитектуре и многоэтапном обучении, но в реальности любой, кто хоть раз видел, как нейронная сеть «понимает» перекресток, знает: это лишь иллюзия. Как метко подметил Эндрю Ын: «Мы — поколение, которое учит компьютеры видеть». И, судя по всему, видим мы не лучше их — всё ещё не можем заставить эти самые компьютеры не путать пешехода с мусорным баком. В итоге, UniUGP, как и большинство «революционных» технологий, станет лишь очередным пунктом в списке технического долга, который когда-нибудь придётся выплачивать.
Что дальше?
Представленная работа, безусловно, элегантна в своей попытке объединить понимание сцены, генерацию видео и планирование траектории в единую архитектуру. Однако, как показывает опыт, любая абстракция умирает от продакшена. Каждый новый слой унификации неизбежно добавляет ещё один потенциальный вектор отказа, ещё одну точку, где реальный мир найдёт способ сломать идеальную диаграмму. Вопрос не в том, сможет ли UniUGP справиться со всеми сложностями дорожной обстановки, а в том, когда и где он столкнётся с непредвиденным — и как это проявится.
Настоящий вызов, по всей видимости, лежит в области причинно-следственного моделирования. Способность генерировать правдоподобные видео — это лишь половина дела. Гораздо сложнее научить систему не просто предсказывать будущее, а понимать, почему это будущее наиболее вероятно. Иначе говоря, избежать создания красивой, но хрупкой иллюзии понимания. Все, что можно задеплоить — однажды упадёт, и вопрос в том, как элегантно эта система справится с неизбежным.
В конечном счете, прогресс в области автономного вождения, вероятно, будет определяться не столько новыми архитектурами, сколько более глубоким пониманием границ применимости этих архитектур. И, возможно, смирением перед неизбежной сложностью реального мира. Каждая «революционная» технология завтра станет техдолгом, но зато, возможно, красиво умирает.
Оригинал статьи: https://arxiv.org/pdf/2512.09864.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Карта ошибок: Анатомия сбоев больших языковых моделей
- Надежность ускорителей: от замысла до реализации
- Квантовые нейросети для реалистичной 3D-визуализации
- От основ к интеллекту: как объединить машинное обучение и большие языковые модели
- Оптимизация запросов: Новый подход для сложных рабочих процессов
- Квантовые нейросети: на пути к скорости и точности
- Роботы учатся на собственном опыте: новый подход к обучению с подкреплением
- Искусственный интеллект как ученый: новый подход к научному познанию
- Адаптивное обучение в условиях неопределенности: новый подход к управлению рисками
- Искуственный интеллект: хрупкость смысла в сложных задачах
2025-12-12 01:51