Автор: Денис Аветисян
Исследователи представили CLASH — систему, объединяющую быстрое реагирование и глубокое понимание языка для надежной навигации в реальном мире и виртуальной среде.
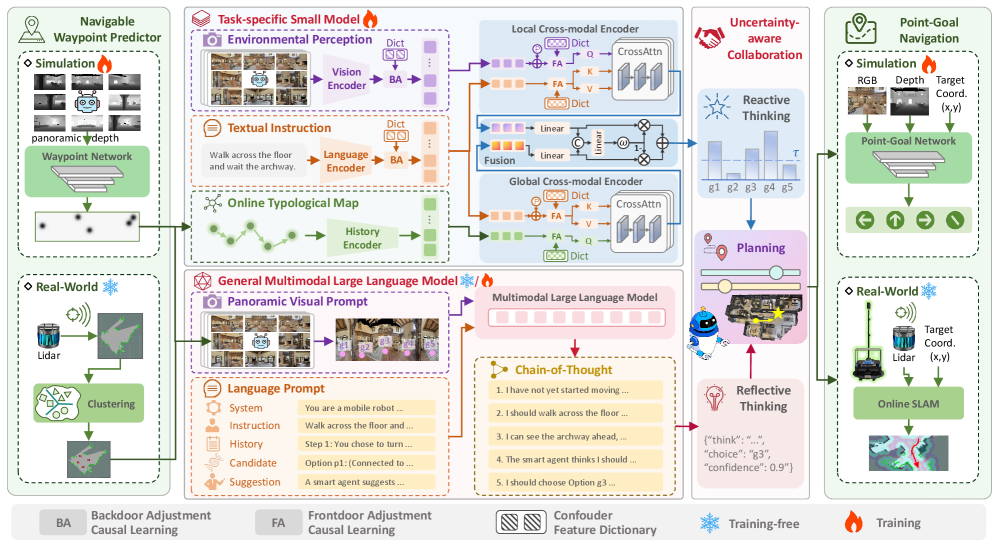
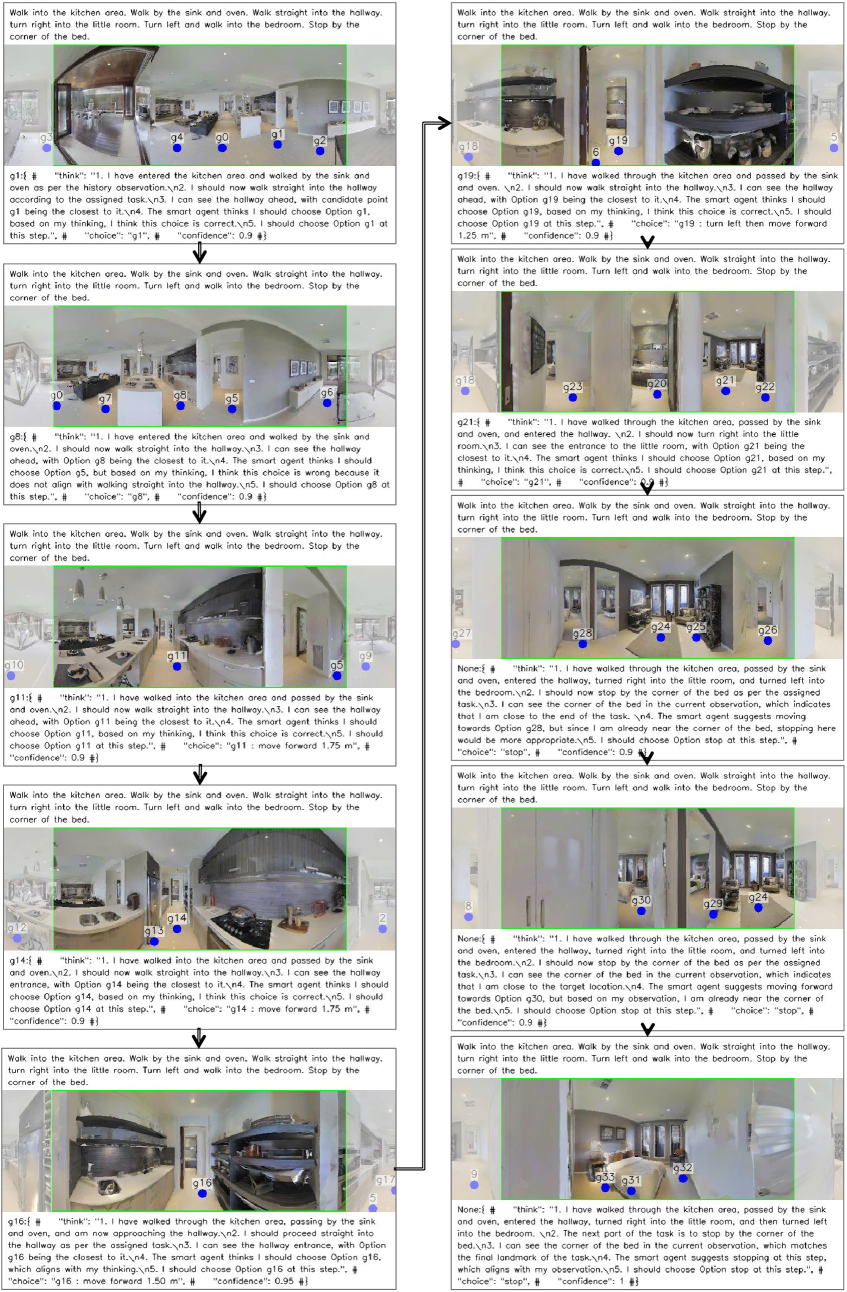
Предложен фреймворк CLASH, комбинирующий небольшую реактивную модель и большую языковую модель для обеспечения надежной и интерпретируемой навигации, основанной на визуальном восприятии и лингвистических инструкциях.
Несмотря на успехи больших языковых моделей в решении задач, требующих рассуждений, их применение в навигации по сложным средам с использованием естественного языка часто уступает специализированным моделям. В данной работе представлена система CLASH: Collaborative Large-Small Hierarchical Framework for Continuous Vision-and-Language Navigation, объединяющая реактивный малый модуль и рефлексивный большой языковой модуль для обеспечения надежной и интерпретируемой навигации. Предложенный иерархический подход, использующий механизм адаптивного объединения решений, демонстрирует передовые результаты в симуляции и реальных условиях. Сможет ли CLASH стать основой для создания действительно автономных агентов, способных эффективно взаимодействовать с окружающим миром?
За гранью симуляций: где виртуальная реальность встречается с реальностью
Первые системы навигации на основе зрения и языка (VLN) активно использовали симуляторы, такие как Matterport3D, для обучения агентов. Это позволило добиться значительного прогресса в автоматическом следовании текстовым инструкциям в виртуальных пространствах. Однако, полагаясь на предопределённые, стандартизированные окружения, эти системы столкнулись с существенным ограничением при переходе к реальному миру. Разрыв между виртуальной средой симулятора и сложностью, непредсказуемостью реальных помещений приводил к снижению производительности и надежности разработанных алгоритмов. Несмотря на успешное освоение симуляций, способность агентов ориентироваться и выполнять инструкции в новых, ранее невиданных локациях оставалась серьезной проблемой, требующей разработки более устойчивых и адаптивных подходов к навигации.
Первые подходы к решению задачи навигации на основе зрения и языка часто демонстрировали недостаточную устойчивость к изменениям в окружающей среде и сложности инструкций. Исследования показали, что модели, обученные на ограниченном наборе данных и в предсказуемых условиях, испытывали значительные трудности при столкновении с незнакомыми помещениями, неожиданными препятствиями или многоступенчатыми указаниями. Например, незначительное отклонение в освещении или наличие новых объектов в кадре могли существенно снизить точность навигации. Эта проблема подчеркивала необходимость разработки более гибких и адаптивных алгоритмов, способных обобщать полученные знания и эффективно функционировать в реальных, непредсказуемых условиях, а также учитывать нюансы лингвистических команд.
Переход к непрерывной навигации в трехмерном пространстве (VLN-CE) потребовал значительного усовершенствования подходов к восприятию и управлению. В отличие от первоначальных задач VLN, ограниченных дискретными точками обзора, VLN-CE предполагает движение в полностью трехмерной среде, что предъявляет более высокие требования к точности оценки местоположения, планированию траектории и интерпретации инструкций на естественном языке. Для успешного выполнения такой задачи алгоритмам необходимо учитывать непрерывные изменения в визуальной информации, эффективно обрабатывать шум и неопределенность, а также разрабатывать стратегии управления, позволяющие плавно и точно перемещаться в неизвестных условиях. Это стимулировало разработку новых архитектур нейронных сетей и методов обучения с подкреплением, направленных на повышение устойчивости и эффективности навигации в непрерывных трехмерных пространствах.
Иерархические системы: мозг и тело в симбиозе
Иерархические системы “мозг-тело” разделяют планирование маршрута и точное управление движением, что повышает адаптивность в динамических средах. Вместо непосредственного управления моторами, верхний уровень иерархии генерирует высокоуровневые цели и последовательности действий, которые затем реализуются нижними уровнями управления. Такое разделение позволяет агенту реагировать на неожиданные препятствия и изменения в окружающей среде без перепланирования всего маршрута. Отделение планирования от исполнения также упрощает перенос навыков на различные робототехнические платформы и позволяет использовать более абстрактные представления окружающей среды, снижая вычислительную сложность и повышая надежность системы в условиях неопределенности.
Для повышения устойчивости системы навигации и ее способности к адаптации к различным условиям, иерархические фреймворки используют методы увеличения объема данных (Data Augmentation) и мультимодального семантического восприятия. Data Augmentation подразумевает искусственное расширение обучающей выборки путем применения различных преобразований к существующим данным, таких как изменение освещения, добавление шума или небольшие искажения геометрии. Мультимодальное семантическое восприятие объединяет информацию, полученную из нескольких сенсоров (например, камеры, лидара, радара) и интерпретирует ее в контексте семантического понимания окружающей среды, что позволяет агенту более надежно идентифицировать объекты и препятствия, даже при неполных или зашумленных данных.
Интеграция кодирования исторических траекторий позволяет агенту накапливать опыт, полученный в ходе предыдущих взаимодействий со средой. Этот процесс включает в себя сохранение и анализ последовательностей состояний и действий, выполненных в различных ситуациях. Сохраняя информацию о прошлых успешных и неуспешных попытках достижения целей, агент формирует внутреннюю модель, которая позволяет ему более эффективно планировать действия в новых, аналогичных ситуациях. Кодирование исторических траекторий способствует улучшению понимания инструкций и повышению устойчивости к изменениям в окружающей среде, поскольку агент может использовать накопленный опыт для корректировки своего поведения и адаптации к новым условиям. Использование методов, таких как рекуррентные нейронные сети (RNN) или Transformers, позволяет эффективно представлять и использовать информацию о прошлых траекториях для прогнозирования оптимальных действий.
MLLM и CLASH: когда языковые модели обретают зрение
Мультимодальные большие языковые модели (MLLM) представляют собой значительный прогресс в возможностях рассуждений, позволяя агентам понимать сложные инструкции и адаптироваться к различным сценариям. В отличие от традиционных моделей, обрабатывающих только текст, MLLM способны интегрировать и анализировать информацию из различных источников, таких как изображения и видео. Это достигается за счет архитектур, объединяющих языковые модели с визуальными энкодерами, что позволяет им устанавливать связи между текстом и визуальным контентом. В результате, агенты на базе MLLM демонстрируют улучшенные показатели в задачах, требующих пространственного понимания, решения проблем и адаптации к меняющейся обстановке, превосходя по эффективности модели, ориентированные исключительно на текстовые данные.
Фреймворк CLASH использует возможности мультимодальных больших языковых моделей (MLLM) посредством комбинации двух ключевых компонентов: реактивного небольшого планировщика (RSMP) и рефлексивного большого рассуждающего модуля (RLMR). RSMP обеспечивает быстрое и надежное выполнение действий, в то время как RLMR отвечает за более широкое контекстуальное понимание ситуации. Такое разделение позволяет системе эффективно сочетать скорость и точность выполнения задач с глубоким анализом окружающей среды, что повышает общую производительность и адаптивность агента.
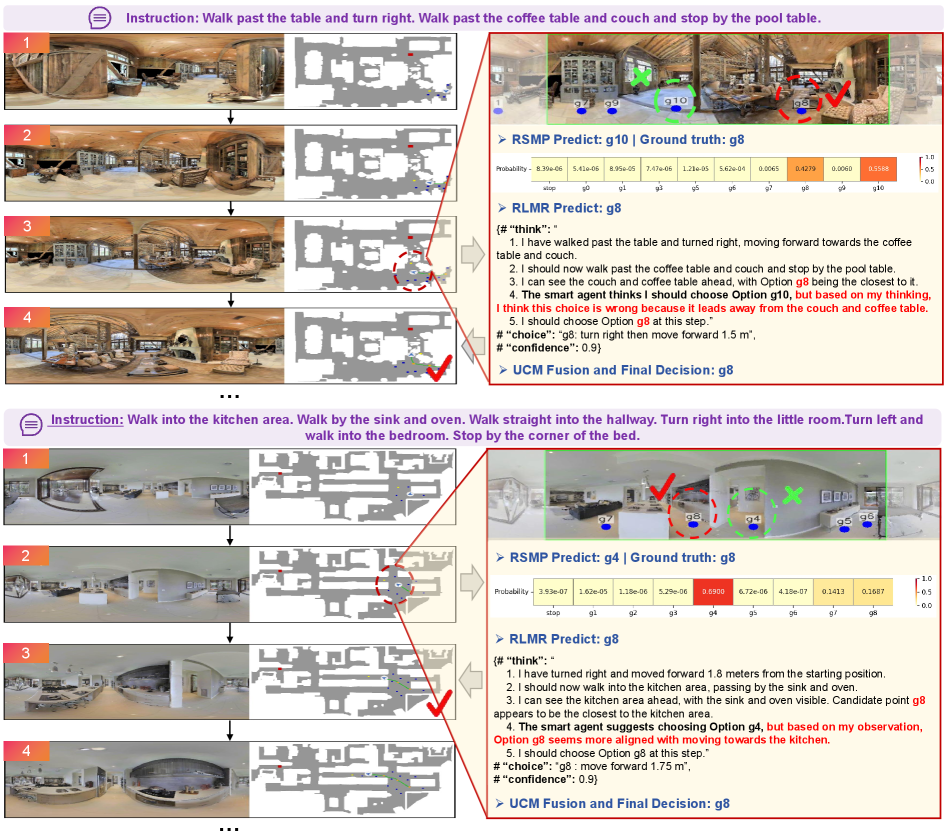
Реактивный Планировщик Малых Моделей (RSMP) использует двухкомпонентную структуру и причинно-следственное обучение для отделения ложных корреляций, повышая надежность действий. В рамках этой структуры, причинно-следственное обучение позволяет модели отличать реальные причинно-следственные связи от случайных совпадений в данных. Рефлексивный Рассуждающий Блок Большой Модели (RLMR) использует панорамную визуальную подсказку и цепочку рассуждений для улучшения пространственного восприятия. Панорамная визуальная подсказка обеспечивает RLMR полным обзором визуальной информации, а цепочка рассуждений позволяет проводить последовательный анализ и логические выводы на основе полученных данных, что критически важно для задач, требующих понимания пространственных отношений и контекста.
Неопределённость и развёртывание в реальном мире: когда теория встречается с практикой
Механизм совместной работы, учитывающий неопределенность, позволяет адаптировать объединение решений, полученных от RSMP и RLMR, на основе оценки достоверности. В его основе лежит применение Конформного Предсказания, обеспечивающего статистически откалиброванные меры уверенности. Данный подход позволяет не просто объединить результаты различных алгоритмов, но и оценить степень надежности каждого из них, что критически важно для принятия обоснованных решений в условиях реального мира. Благодаря статистической калибровке, система способна предоставлять вероятностные оценки, отражающие реальную вероятность успеха, а не просто субъективные предположения, что повышает общую надежность и безопасность функционирования.
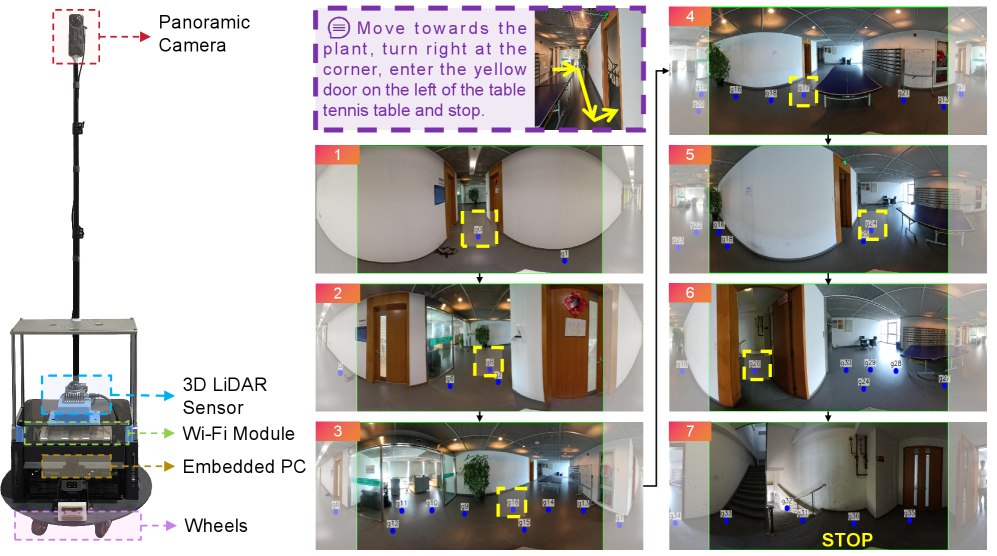
Система CLASH, предназначенная для практического применения в реальных условиях, использует комбинацию передовых методов для обеспечения надежной локализации и обхода динамических препятствий. В основе лежит кластеризация данных, полученных с лидара, позволяющая эффективно выделять и отслеживать объекты окружения. Для точного определения местоположения и построения карты используется SLAM (Simultaneous Localization and Mapping) — технология одновременной локализации и построения карты. Благодаря сочетанию этих подходов, CLASH способна эффективно ориентироваться в сложных и меняющихся условиях, избегая столкновений и обеспечивая безопасное передвижение, что является критически важным для успешной работы робототехнических систем в реальном мире.
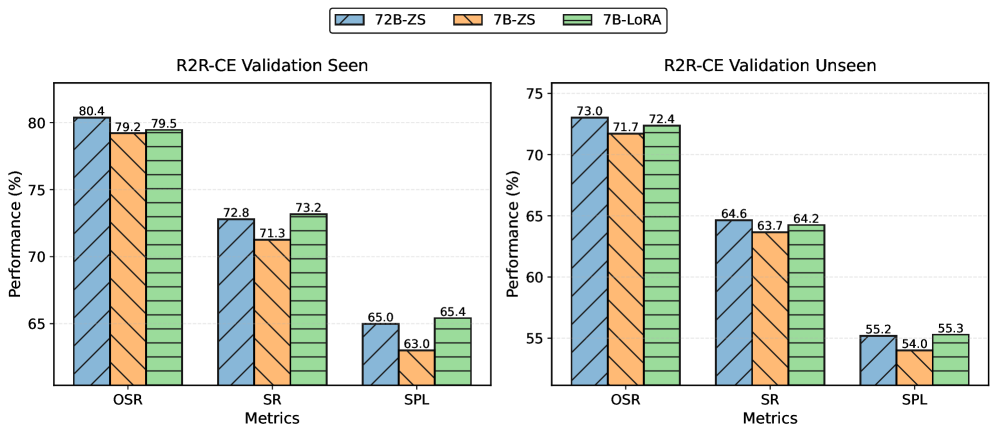
Исследования, использующие фреймворки UniNaVid и NaVid, демонстрируют высокую эффективность навигации, основанной на больших мультимодальных языковых моделях (MLLM). Достигнута передовая точность успешного выполнения задач — 61% на тестовом наборе данных, что на 13.79% превышает результаты предыдущих методов. Разработанная система CLASH также показывает значительные успехи, обеспечивая 35.65% успешных навигаций и 28.46% общей длины пройденного пути (SPL) на наборе данных REVERIE-CE. Важно отметить, что производительность напрямую зависит от размера используемой модели: модель с 72 миллиардами параметров требует в 30 раз больше времени для выполнения задач по сравнению с моделью, содержащей 1 миллиард параметров, что подчеркивает необходимость баланса между точностью и скоростью вычислений.
Исследование демонстрирует, как иерархическая структура CLASH, объединяющая быстрый, реактивный модуль с рефлексивным языковым ядром, пытается обуздать хаос реального мира. Это напоминает попытку построить идеальную диаграмму — элегантную и логичную — прежде чем её сотрет суровая реальность продакшена. Брайан Керниган метко подметил: «Простота — это высшая степень утонченности». В CLASH стремление к простоте проявляется в разделении задач между разными моделями, позволяя системе более эффективно ориентироваться в сложных визуальных сценах и понимать языковые инструкции. Однако, как показывает опыт, даже самая изящная архитектура не застрахована от падений, когда её подвергают испытаниям в реальной среде.
Что дальше?
Представленный фреймворк CLASH, несомненно, элегантен в своей иерархической структуре. Однако, история учит, что любая «самовосстанавливающаяся» система просто ещё не встретила достаточно сложных входных данных. Уверенность в оценках неопределённости — это хорошо, пока эта самая неопределённость не превращается в закономерность ошибок, которую продукшен-команда найдёт в первые же часы эксплуатации. Документация, описывающая все тонкости взаимодействия больших и малых моделей, вероятно, будет представлять собой форму коллективного самообмана, поскольку предсказать все граничные случаи попросту невозможно.
Настоящая проверка ждёт в реальных условиях, где освещение непредсказуемо, объекты перемещаются, а пользователи вводят инструкции, которые противоречат здравому смыслу. Следующим этапом, вероятно, станет попытка «обучить» систему игнорировать абсурдные запросы, что, в свою очередь, потребует разработки ещё более сложных механизмов оценки контекста и намерений. И если ошибка всё-таки воспроизводится — это не баг, это признак стабильной системы, способной работать в предсказуемых условиях.
В конечном итоге, всё сведётся к оптимизации вычислительных ресурсов и поиску компромисса между точностью и скоростью работы. Пока же, CLASH — это ещё один шаг на пути к созданию систем, которые умеют ориентироваться в пространстве и понимать человеческий язык, но до полной автономии ещё очень далеко. И это хорошо.
Оригинал статьи: https://arxiv.org/pdf/2512.10360.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Когда мнения расходятся: как модели принимают решения при конфликте данных
- Искусственный интеллект, который учится играть: новая платформа для стабильного обучения агентов
- Взгляд в будущее: как теория динамических систем преобразит анализ временных рядов
- Шёпот языков: как дрессировать цифрового голема для забытых наречий.
- Наука больших команд и широких горизонтов
- Переключение намагниченности в квантовых антиферромагнетиках: новые горизонты для терагерцовой спинтроники
- Трансформеры: От Прогнозирования к Пониманию Причинности
- Оптимизация больших языковых моделей: новый подход к снижению требований к ресурсам
- Белки-хамелеоны: Пределы предсказания гибкости структуры
- Перевод голоса в реальном времени: Новый подход без обучения
2025-12-14 09:20