Автор: Денис Аветисян
Исследователи представили фреймворк AEGIS, позволяющий моделям, объединяющим зрение, язык и действия, безопасно выполнять задачи манипулирования, избегая столкновений.
В статье представлен фреймворк AEGIS, интегрирующий функции Control Barrier Functions в модели Vision-Language-Action для обеспечения явных ограничений безопасности при роботизированных манипуляциях.
Несмотря на впечатляющие успехи моделей «Vision-Language-Action» в робототехнике, обеспечение безопасности и предотвращение столкновений в неструктурированных средах остается сложной задачей. В данной работе, посвященной разработке ‘VLSA: Vision-Language-Action Models with Plug-and-Play Safety Constraint Layer’, представлена архитектура AEGIS, интегрирующая функции управления на основе контрольных барьеров для явного обеспечения безопасности при манипуляциях. Предложенный подход позволяет значительно повысить надежность роботов, избегая столкновений и успешно выполняя задачи, без необходимости переобучения существующих моделей. Сможет ли AEGIS стать основой для создания действительно безопасных и автономных робототехнических систем, способных эффективно взаимодействовать с окружающим миром?
Постановка задачи: Безопасность роботизированных систем
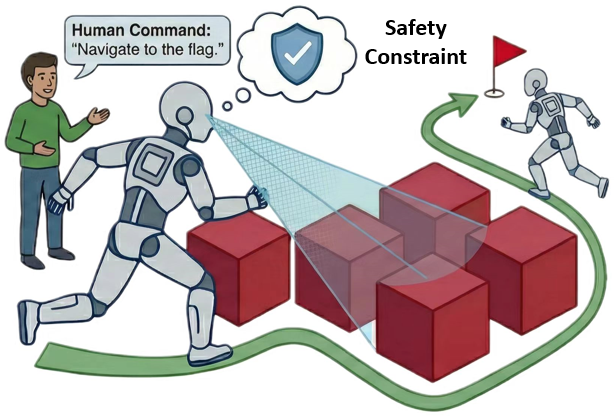
Современные роботизированные системы, несмотря на впечатляющие возможности, часто демонстрируют недостаточную надежность в обеспечении безопасности при работе в реальных, динамично меняющихся условиях. В отличие от контролируемых промышленных сред, где роботы функционируют по четко заданным алгоритмам, повседневная жизнь полна непредсказуемых препятствий и взаимодействий. Это создает значительные трудности для роботов, которым необходимо не только выполнять поставленные задачи, но и избегать столкновений с людьми и объектами, а также адаптироваться к неожиданным изменениям в окружающей среде. Отсутствие встроенных механизмов гарантии безопасности ограничивает широкое применение роботов за пределами специализированных производственных линий, подчеркивая необходимость разработки новых подходов к управлению и контролю, которые обеспечивают надежную и безопасную работу в непредсказуемых условиях.
Традиционные подходы к управлению роботами, основанные на жестком программировании и предварительном планировании, часто оказываются неэффективными в непредсказуемых условиях реального мира. Существующие системы сталкиваются с трудностями при распознавании неожиданных препятствий и адаптации к динамически меняющейся обстановке, что повышает риск столкновений и нанесения вреда. В результате возникает острая потребность в разработке надежных механизмов безопасности, способных гарантировать стабильную и безопасную работу роботов даже в сложных и неструктурированных средах. Исследования в этой области направлены на создание систем, способных предвидеть потенциальные опасности, оперативно реагировать на внезапные изменения и обеспечивать плавное и безопасное взаимодействие с окружающим миром, минимизируя вероятность аварийных ситуаций и повреждений.
Успешное выполнение сложных задач роботами требует не просто достижения поставленной цели, но и гарантии безопасности при этом. Традиционные алгоритмы управления часто фокусируются исключительно на эффективности, игнорируя потенциальный вред, который робот может нанести окружающей среде или людям. Это обуславливает необходимость кардинального изменения в подходах к управлению, смещения акцента на безопасность как неотъемлемую часть процесса планирования и выполнения действий. Современные исследования направлены на разработку алгоритмов, которые позволяют роботу предвидеть потенциальные столкновения, адаптироваться к неожиданным изменениям в окружении и, при необходимости, снижать скорость или изменять траекторию движения, чтобы избежать нанесения ущерба. Такой подход предполагает интеграцию систем восприятия, планирования и управления в единый, самообучающийся контур, способный обеспечивать безопасное взаимодействие робота с динамичным и непредсказуемым миром.
Архитектура VLSA: Безопасность как интегральная часть
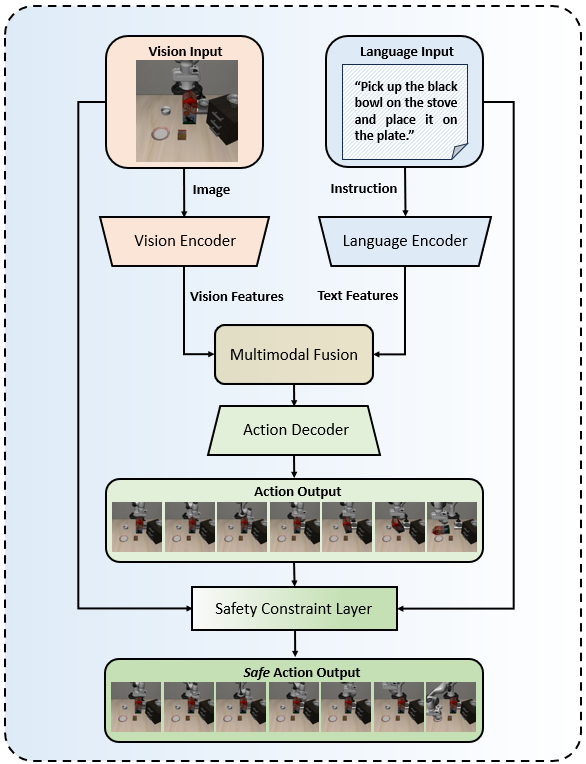
Архитектура VLSA (Vision-Language Safety Architecture) представляет собой расширение возможностей существующих моделей «Зрение-Язык» (VLMs) за счет явного включения соображений безопасности. В отличие от стандартных VLM, которые фокусируются на выполнении инструкций на основе визуального и текстового ввода, VLSA интегрирует механизмы, позволяющие учитывать ограничения и предотвращать небезопасные действия робота. Это достигается путем добавления специализированных слоев и модулей, которые анализируют как входные данные, так и планируемые действия, чтобы гарантировать соответствие заданным критериям безопасности и предотвратить выход за пределы допустимых границ. Таким образом, VLSA направлена на создание более надежных и безопасных систем, способных взаимодействовать с реальным миром без риска возникновения опасных ситуаций.
В основе архитектуры VLSA лежит слой ограничения безопасности, который динамически корректирует действия робота для обеспечения соблюдения заранее определенных границ безопасности. Этот слой функционирует как промежуточное звено между языковой моделью и исполнительными механизмами робота, изменяя предложенные действия в режиме реального времени. Корректировка осуществляется на основе текущего состояния робота и окружающей среды, что позволяет предотвратить выход за пределы допустимых границ, определенных пользователем или системой. Слой ограничения безопасности не просто блокирует опасные действия, но и предлагает альтернативные, безопасные варианты, сохраняя при этом общую цель, поставленную перед роботом. Динамическая корректировка позволяет адаптироваться к изменяющимся условиям и непредсказуемым ситуациям, повышая надежность и безопасность работы робота в реальном мире.
В основе обеспечения безопасности в VLSA лежит использование функций барьерного управления (Control Barrier Functions, CBF). CBF представляют собой математические функции, которые формализуют ограничения безопасности в виде неравенств. Эти неравенства гарантируют, что система остается в пределах «безопасного множества» во времени, обеспечивая «инвариантность вперед» ($f(x) \ge 0$). Формально, если начальное состояние системы находится в безопасном множестве, и выполняется CBF, то система останется в этом множестве для любого конечного момента времени. CBF позволяют не только определить безопасные состояния, но и рассчитать допустимые управляющие воздействия, которые поддерживают систему в этих состояниях, что критически важно для безопасного функционирования робототехнических систем.
Оптимизация безопасности: Квадратичное программирование и AEGIS
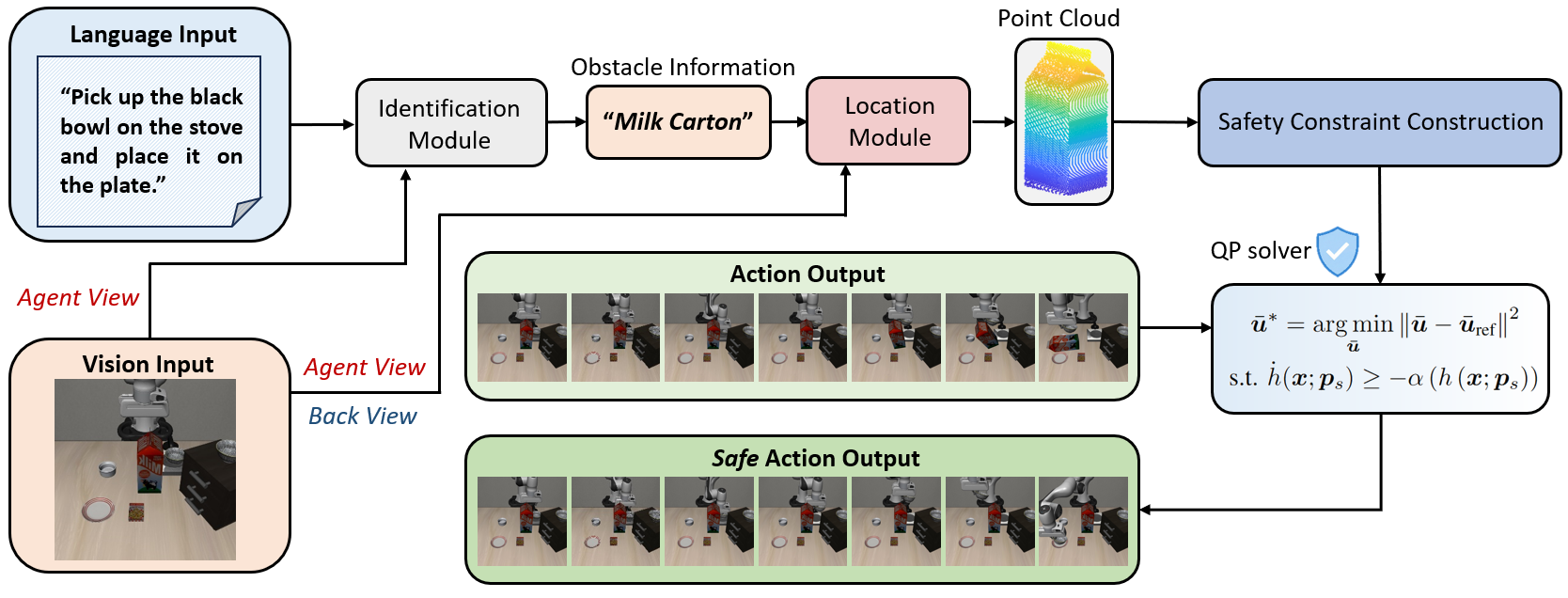
В рамках VLSA, наша реализация AEGIS использует квадратичное программирование (QP) для эффективного решения задачи оптимизации, заключающейся в балансировке целевых задач и ограничений безопасности. QP позволяет сформулировать задачу как минимизацию $f(x) = \frac{1}{2}x^T H x + c^T x$ при линейных ограничениях $Ax \leq b$, где $x$ — вектор переменных оптимизации, $H$ — матрица весов, $c$ — вектор констант, а $A$ и $b$ определяют ограничения. Такой подход обеспечивает нахождение оптимального решения, учитывающего как достижение поставленной цели, так и соблюдение заданных ограничений по безопасности, что критически важно для надежной работы робототехнических систем.
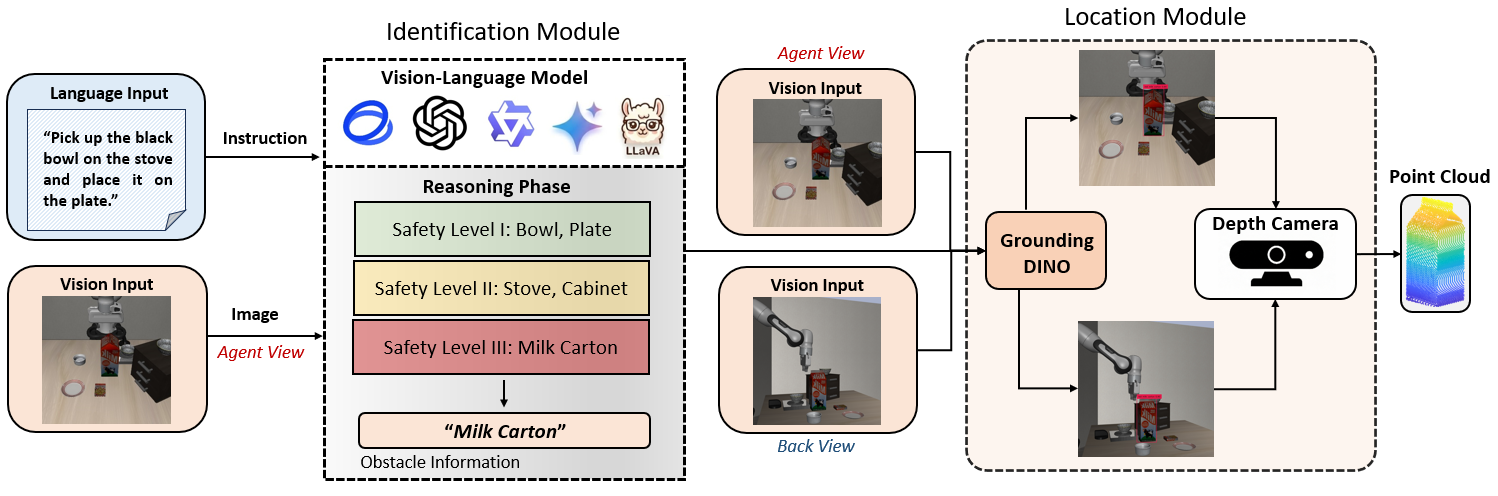
В рамках AEGIS, для оценки препятствий и рисков используется интеграция с моделью «Vision-Language» (VLM). VLM позволяет семантически анализировать визуальную информацию, извлекать релевантные данные об окружении и преобразовывать их в понятные для системы представления. Эта информация поступает в слой ограничения безопасности, где используется для формирования ограничений и корректировки планируемых траекторий робота. В частности, VLM идентифицирует типы объектов, оценивает их потенциальную опасность и предсказывает возможные траектории движения, что позволяет системе безопасности заранее учитывать риски и избегать столкновений или других нежелательных ситуаций.
Благодаря возможности прогнозирования потенциальных опасностей, робот способен заблаговременно корректировать свои действия для поддержания безопасной траектории движения. Это достигается за счет анализа окружающей среды и оценки рисков, что позволяет системе не только реагировать на возникшие угрозы, но и предотвращать их. Такая проактивная адаптация действий обеспечивает устойчивую и надежную работу робота в различных условиях, минимизируя вероятность столкновений и других нежелательных ситуаций. Функциональность особенно важна в динамичных средах, где препятствия могут появляться или перемещаться непредсказуемо.
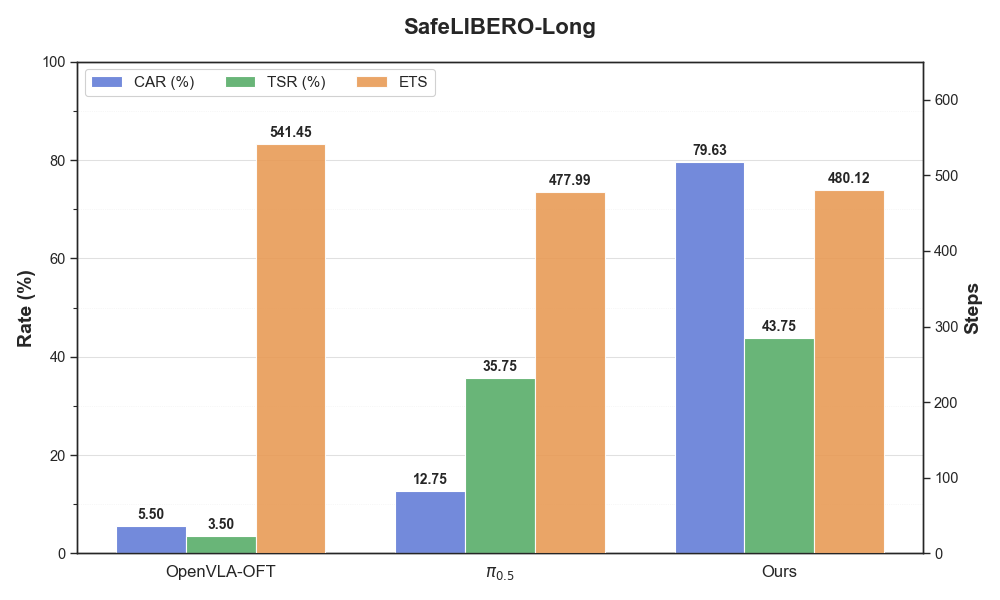
Оценка безопасности: Результаты на SafeLIBERO
Для всесторонней оценки надежности разработанных алгоритмов, проведена серия масштабных тестов с использованием SafeLIBERO — специализированного набора данных, созданного на основе LIBERO. Данный бенчмарк представляет собой комплексную платформу для проверки систем в критических ситуациях, требующих повышенного внимания к безопасности. SafeLIBERO содержит разнообразные сценарии, имитирующие реальные условия эксплуатации робототехнических систем, что позволяет объективно оценить способность алгоритмов избегать столкновений и успешно выполнять поставленные задачи в сложных и непредсказуемых обстоятельствах. Тщательно подобранные сценарии и метрики оценки обеспечивают надежную основу для сравнения различных подходов к обеспечению безопасности в робототехнике.
Исследования, проведенные с использованием эталонного набора данных SafeLIBERO, продемонстрировали значительное превосходство системы AEGIS в обеспечении безопасности. Система достигла впечатляющего показателя предотвращения столкновений в $77.85\%$, что в четыре раза выше, чем у базовых методов. Такой существенный прирост эффективности указывает на способность AEGIS надежно избегать опасных ситуаций и обеспечивать безопасное функционирование в сложных условиях, что критически важно для применения в задачах, требующих повышенной надежности и безопасности.
В ходе экспериментов система AEGIS продемонстрировала высокую эффективность в успешном выполнении поставленных задач, достигнув показателя в $68.13\%$. Этот результат существенно превосходит аналогичные показатели у конкурирующих методов: π0.5 — $50.88\%$, а OpenVLA-OFT — всего $22.81\%$. Такое значительное превосходство указывает на повышенную надежность и способность AEGIS эффективно решать сложные задачи в условиях, требующих высокой точности и безошибочности действий. Высокий процент успешного выполнения задач подтверждает потенциал системы для применения в критически важных областях, где требуется стабильная и предсказуемая работа.
В ходе сравнительного анализа производительности AEGIS продемонстрировал значительное преимущество в скорости выполнения задач. Система AEGIS потребовала всего 262.30 шагов выполнения ($ETS$), что является наилучшим показателем среди протестированных методов. Для сравнения, π0.5 потребовало 278.24 шага, а OpenVLA-OFT — 323.16 шага. Такая повышенная эффективность AEGIS позволяет не только быстрее решать поставленные задачи, но и снижает вычислительную нагрузку, что особенно важно для применения в системах с ограниченными ресурсами и в реальном времени. Данный результат указывает на оптимизацию алгоритмов и архитектуры AEGIS, обеспечивающую более рациональное использование вычислительных ресурсов.
Вычислительная нагрузка, связанная с механизмом обеспечения безопасности — так называемым Safety Constraint Layer — оказалась незначительной и составила всего $1.86\%$ от общего времени цикла, что соответствует $0.356$ миллисекундам. Этот результат указывает на то, что предложенный подход к обеспечению безопасности не приводит к существенному замедлению работы системы и может быть эффективно интегрирован в приложения, требующие работы в реальном времени. Небольшое время вычислений Safety Constraint Layer позволяет сохранять высокую производительность и отзывчивость системы, что критически важно для безопасной и надежной работы робототехнических устройств и автономных систем.
Представленная работа демонстрирует стремление к созданию детерминированных систем, способных гарантированно избегать столкновений в сложных сценариях манипулирования. Внедрение функции барьерного управления (Control Barrier Function) в модель «Видение-Язык-Действие» (VLA) позволяет явно задавать ограничения безопасности, что особенно важно для критически важных робототехнических приложений. Как однажды заметил Роберт Тарьян: «Простота — это главное. Если вы не можете объяснить что-то просто, значит, вы сами этого не понимаете.». Эта фраза находит отражение в стремлении авторов к созданию элегантного и доказуемо безопасного решения, не требующего переобучения системы, что значительно повышает надежность и предсказуемость поведения робота.
Куда Далее?
Представленная работа, хотя и демонстрирует элегантное применение функций барьерного управления в контексте моделей «Видение-Язык-Действие», лишь слегка приоткрывает завесу над истинной сложностью задачи обеспечения безопасности в робототехнике. Всё ещё остаётся нерешенным вопрос о масштабируемости подхода к сценариям с высокой степенью неопределённости и сложными взаимодействиями с динамичной средой. Простое наложение ограничений на планируемые действия, какими бы математически строгими они ни были, не гарантирует абсолютной безопасности, особенно в условиях неполной или ошибочной информации, получаемой от сенсоров.
Следующим логичным шагом представляется разработка алгоритмов, способных к самокоррекции и адаптации в реальном времени, использующих, возможно, методы байесовского вывода или обучения с подкреплением для уточнения границ допустимых действий. Особенно важным представляется переход от реактивных стратегий к проактивным, предсказывающим возможные угрозы ещё до их возникновения. В конечном счете, достижение истинной безопасности требует не просто ограничения действий, а глубокого понимания физических законов и принципов причинно-следственной связи.
В хаосе данных спасает только математическая дисциплина, но даже она не всесильна. Необходимо помнить, что любая модель — это лишь упрощение реальности, и абсолютной точности достичь невозможно. Будущие исследования должны быть направлены на разработку методов оценки и минимизации рисков, связанных с неизбежными неточностями и погрешностями, а не на иллюзорную надежду на создание абсолютно безопасной системы.
Оригинал статьи: https://arxiv.org/pdf/2512.11891.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Сила в Модели: Ограничения Оптимизации в Математических Задачах
- Искусственный интеллект и закон: гармония неизбежна
- Молекулярный интеллект: проверка химического мышления
- Видеосинтез без тормозов: новый подход к генерации видео в реальном времени
- Топoлогические формы и тайны Вселенной
- Мир текстов без границ: Новые возможности многоязыковых представлений
- QR-разложение для экстремальных матриц: новый взгляд на GPU
- Квантовый усилитель амплитуды: новый подход к поиску основного состояния
- Социальные сети: Искусство правдоподобных взаимодействий
- Искусственный интеллект и векторный поиск: рука об руку
2025-12-16 10:18