Автор: Денис Аветисян
Исследователи представили QuantGraph — алгоритм, использующий квантовые вычисления для ускорения решения задач поиска кратчайшего пути и оптимизации траекторий.

QuantGraph объединяет поиск Гровера и рекурсивное прогнозирующее управление для повышения эффективности оптимизации в графовых структурах.
Несмотря на широкое применение динамического программирования в задачах оптимизации на графах, его масштабируемость остается серьезным ограничением. В данной работе представлена система ‘QuantGraph: A Receding-Horizon Quantum Graph Solver’, двухэтапный квантово-усиленный фреймворк, преобразующий локальные и глобальные задачи оптимизации на графах в квантовые поиски по дискретным пространствам траекторий. Предложенный подход сочетает алгоритм поиска Гровера с принципами рекурсивного прогнозирующего управления, демонстрируя потенциальное ускорение и повышение точности дискретизации траекторий. Возможно ли дальнейшее расширение данной архитектуры для решения более сложных задач оптимизации и преодоления ограничений классических методов?
Преодолевая Сложность: Вызовы Оптимизации Траекторий
Традиционные методы, такие как динамическое программирование, сталкиваются с существенными трудностями при поиске оптимальных траекторий в динамических системах из-за экспоненциального роста вычислительной сложности. Этот процесс требует оценки огромного числа возможных путей, особенно при увеличении размерности пространства состояний и длительности планируемой траектории. По мере того, как количество переменных и ограничений растет, вычислительные затраты быстро становятся непомерными, делая применение этих методов практически невозможным для задач, требующих высокой точности и скорости реагирования. В результате, даже относительно простые задачи оптимизации траекторий могут потребовать недопустимо больших ресурсов, ограничивая возможности применения динамического программирования в реальных системах управления и навигации.
По мере усложнения систем, требующих всё более высокой детализации и прогнозирования на больших временных интервалах, традиционные методы оптимизации траекторий сталкиваются с принципиальными трудностями. Суть проблемы заключается в экспоненциальном росте вычислительной сложности: с увеличением числа состояний системы и длительности планируемого горизонта, объём вычислений возрастает экспоненциально, делая задачу практически нерешаемой даже для современных вычислительных мощностей. Это означает, что для систем с высокой степенью свободы или требующих планирования на длительные периоды времени, алгоритмы, основанные на динамическом программировании или подобных подходах, становятся непрактичными из-за чрезмерных затрат времени и ресурсов, что существенно ограничивает их применение в таких областях, как робототехника и автономная навигация.
Ограничения традиционных методов оптимизации траекторий существенно затрудняют развитие передовых технологий в различных областях. В робототехнике, где требуется планирование сложных движений в реальном времени, текущие алгоритмы часто оказываются неспособны обеспечить достаточную точность и скорость вычислений. Аналогичные проблемы возникают в системах автономной навигации, где необходимо учитывать множество факторов и быстро адаптироваться к изменяющимся условиям. В задачах реального времени, таких как управление сложными механизмами или контроль производственных процессов, задержки, вызванные вычислительной сложностью, могут привести к нестабильности и ошибкам. В связи с этим, разработка новых подходов к оптимизации траекторий, способных преодолеть эти ограничения, является критически важной задачей для дальнейшего прогресса в этих и других областях науки и техники.

QuantGraph: Квантовый Скачок в Оптимизации
Алгоритм QuantGraph использует принципы квантового поиска для повышения эффективности исследования пространства решений по сравнению с классическими алгоритмами. В отличие от классических методов, которые последовательно перебирают варианты, квантовый поиск, основанный на суперпозиции и интерференции, позволяет одновременно исследовать множество возможных решений. Это достигается за счет использования квантовых операций, таких как преобразование Адамара и амплитудная амплификация, что позволяет значительно сократить время, необходимое для нахождения оптимального или близкого к оптимальному решения, особенно в задачах с высокой размерностью и сложностью пространства поиска. Квантовый алгоритм Гровера, являющийся основой QuantGraph, обеспечивает $O(\sqrt{N})$ сложность поиска в несортированной базе данных размером $N$, что представляет собой существенное улучшение по сравнению с $O(N)$ для классических алгоритмов.
Метод QuantGraph преобразует задачу оптимизации траектории в задачу квадратичной неотрицательной бинарной оптимизации (QUBO). Формулировка QUBO позволяет эффективно использовать кванвенные алгоритмы, в частности, алгоритмы, основанные на принципах квантового отжига и квантового поиска. Представление задачи в виде QUBO требует определения матрицы стоимостей, элементы которой отражают стоимость различных конфигураций бинарных переменных, представляющих параметры траектории. Минимизация функции стоимости, заданной матрицей QUBO, эквивалентна поиску оптимальной траектории. Такая формулировка является ключевой для применения кванвенных ускорителей и получения преимущества по сравнению с классическими методами оптимизации.
Алгоритм QuantGraph использует адаптивный поиск Гровера для итеративной оптимизации порога поиска, что позволяет идентифицировать траектории с минимальной стоимостью при снижении вычислительных затрат. В рамках фиксированного бюджета запросов, данный подход обеспечивает квадратичное увеличение точности дискретизации ($O(\sqrt{N})$) по сравнению с классическими методами. Это означает, что для достижения той же точности решения, QuantGraph требует значительно меньше вычислительных ресурсов, что особенно важно для задач оптимизации высокой размерности и сложности.

Усовершенствование Управления с Помощью Продвинутых Методов
QuantGraph использует стратегию рекурсивного горизонтного управления (Receding Horizon Control) для оптимизации управления в пределах коротких временных интервалов. Этот подход позволяет системе адаптироваться к изменяющимся условиям, пересчитывая оптимальное управление на каждом шаге с учетом текущего состояния и прогноза на ближайший горизонт. В отличие от методов, планирующих на весь горизонт заранее, рекурсивное управление обеспечивает более устойчивое и эффективное решение задач долгосрочного планирования, особенно в динамичных средах. При этом, на каждом шаге решается задача оптимизации только для ограниченного временного отрезка, что снижает вычислительную сложность и позволяет оперативно реагировать на внешние воздействия.
Использование Model Predictive Control (MPC) в QuantGraph позволяет эффективно управлять большими пространствами состояний и ориентироваться в сложных средах. MPC, в сочетании с рекурсивным горизонтным управлением, позволяет QuantGraph решать задачи оптимизации, учитывая динамику системы и ограничения, даже при большом количестве переменных состояния. Этот подход позволяет избежать «проклятия размерности», характерного для методов, требующих полного перебора состояний, и обеспечивает масштабируемость решения при увеличении сложности среды. Эффективность управления в больших пространствах состояний достигается за счет оптимизации на каждом шаге планирования с учетом прогноза поведения системы на заданном горизонте.
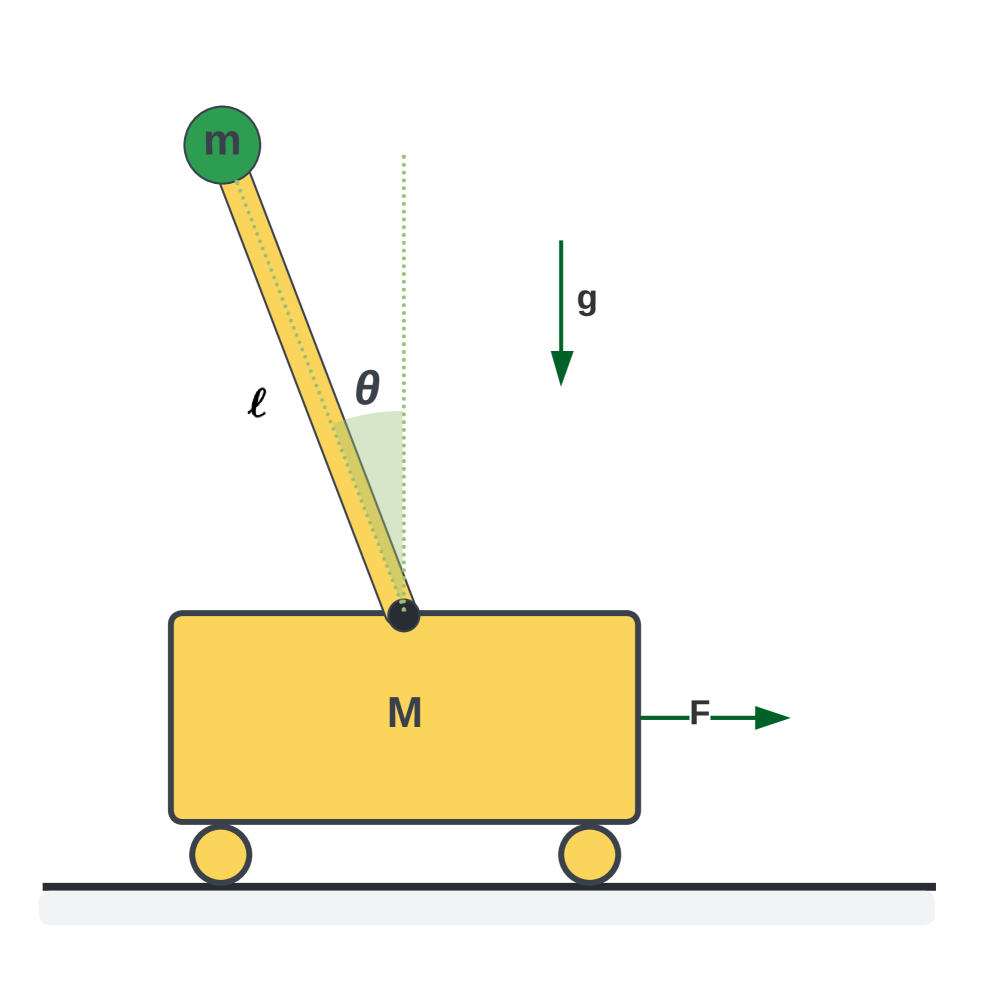
Эффективность QuantGraph была продемонстрирована на стандартных тестовых системах — Double Integrator и более сложной Cart Pole. В ходе тестирования QuantGraph показал линейную сложность запросов, зависящую от горизонта планирования $T$, что является существенным преимуществом по сравнению с экспоненциальной сложностью монолитных методов поиска. Кроме того, QuantGraph обеспечивает снижение ошибки дискретизации на множитель $epsilon^2$, где $epsilon$ представляет собой классический уровень дискретизации. Эти результаты подтверждают превосходство QuantGraph в задачах оптимизации и управления, обеспечивая как более высокое качество решений, так и увеличение скорости вычислений.
Смягчение Дискретизации и Расширение Области Применения
Приближение непрерывной динамики дискретными шагами, неизбежное в процессе оптимизации траекторий, часто приводит к ошибкам дискретизации, существенно влияющим на точность получаемых решений. Данная погрешность возникает из-за того, что непрерывные процессы заменяются последовательностью дискретных состояний, что неизбежно вносит искажения. Величина ошибки зависит от размера шага дискретизации: чем крупнее шаг, тем выше погрешность, но при этом снижаются вычислительные затраты. Однако, чрезмерно грубая дискретизация может привести к неточным или даже нереалистичным траекториям. Таким образом, поиск оптимального баланса между точностью и вычислительной эффективностью является критически важной задачей в оптимизации траекторий, и ошибки дискретизации требуют тщательного учета при разработке алгоритмов.
Исследования показывают, что квантово-усиленный поиск, реализованный в QuantGraph, существенно снижает зависимость оптимизации траектории от ошибки дискретизации. Это позволяет использовать более грубые сетки при моделировании динамических систем, не жертвуя при этом качеством полученных решений. Традиционные методы часто требуют чрезвычайно плотных сеток для обеспечения точности, что приводит к значительному увеличению вычислительных затрат. QuantGraph, напротив, благодаря использованию принципов квантовых вычислений, эффективно исследует пространство решений даже при разреженных сетках, находя оптимальные траектории с высокой точностью. Данный подход открывает возможности для решения задач, ранее недоступных из-за вычислительных ограничений, и позволяет моделировать более сложные динамические системы с меньшими затратами ресурсов.
Возможность моделирования линейных стационарных систем в сочетании с уменьшением чувствительности к дискретизации значительно расширяет область применения QuantGraph. Это позволяет эффективно решать задачи оптимизации траекторий и управления для широкого класса динамических систем, ранее требовавших использования чрезвычайно мелких сеток для обеспечения точности. Благодаря этому подходу, QuantGraph становится применимым не только к сложным нелинейным системам, но и к задачам, где преобладают линейные модели, таким как управление робототехникой, проектирование систем автоматического управления и моделирование динамики летательных аппаратов. Расширение функциональности позволяет исследователям и инженерам решать более сложные и реалистичные задачи, открывая новые горизонты в области оптимизации и управления динамическими системами.
Представленная работа демонстрирует стремление к упрощению сложных вычислений, что находит отклик в известном высказывании Альберта Эйнштейна: «Всё должно быть настолько простым, насколько это возможно, но не проще». QuantGraph, предлагая кванторное решение для оптимизации траекторий, отбрасывает избыточность классических алгоритмов, фокусируясь на плотности смысла. Использование алгоритма Гровера в сочетании с рекурсивным прогнозирующим управлением демонстрирует отказ от ненужных шагов в поиске оптимального пути. Данный подход, стремящийся к элегантности и эффективности, является воплощением принципа, согласно которому истинное совершенство достигается не за счет добавления, а за счет исключения всего лишнего.
Что дальше?
Представленная работа, при всей её элегантности, лишь приоткрывает дверь в область квантового управления траекториями. Сущность проблемы — не в поиске более быстрого алгоритма, а в осознании, что сама постановка задачи часто перегружена излишними деталями. Скорость не является самоцелью, если путь к ней усложняет понимание. Разработка QuantGraph, по сути, подчеркивает необходимость упрощения моделей, а не их усложнения с целью достижения большей точности. Система, требующая подробных инструкций для реализации даже незначительных изменений, уже проиграла.
Очевидным направлением дальнейших исследований является исследование границ применимости данного подхода. Где заканчивается преимущество квантового поиска и начинается доминирование классических алгоритмов, оптимизированных для конкретного аппаратного обеспечения? И, что более важно, как интегрировать принципы QuantGraph в существующие системы управления, не создавая при этом ещё более сложный и неэффективный гибрид? Понятность — это вежливость, и она должна быть приоритетом.
В конечном счете, истинный успех не будет измерен количеством сэкономленных тактов процессора, а способностью сформулировать задачу так, чтобы решение стало очевидным. Сложность — это тщеславие. Истинная красота — в простоте. И, возможно, самое важное, что следует помнить: если система не может объяснить сама себя, она не имеет права на существование.
Оригинал статьи: https://arxiv.org/pdf/2512.15476.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Устойчивое обучение языковых моделей: новый подход к контролю стратегии
- Самообучающиеся системы: новый подход к созданию многоагентных взаимодействий
- Взгляд под капот: Анализ кода, сгенерированного нейросетями
- Квантовые системы в полуклассическом режиме: новый подход к моделированию
- LongCat-Video: ещё один «прорыв», который придётся поддерживать.
- Искусственный интеллект и архитектура будущего: новый виток эволюции
- Растительность под прицетом ИИ: Оценка биофизических параметров по снимкам Sentinel-2
- Автопилот нового поколения: Единая модель для понимания, планирования и предвидения
- Надежность ускорителей: от замысла до реализации
- Визуальный след: Сжатие рассуждений для мощных языковых моделей
2025-12-18 17:48