Автор: Денис Аветисян
Исследователи предлагают усовершенствованный алгоритм CMA-ES, динамически адаптирующий время измерения для повышения эффективности оптимизации робототехнических систем в зашумленных средах.
Представлен алгоритм AS-CMA, обеспечивающий повышение скорости, эффективности и надежности оптимизации в задачах, связанных с роботами и использующих стратегии эволюции.
Оптимизация роботизированных систем часто сталкивается с противоречием между скоростью оценки кандидатов и точностью измерений в условиях зашумленных данных. В работе, посвященной ‘Improving CMA-ES Convergence Speed, Efficiency, and Reliability in Noisy Robot Optimization Problems’, предложен метод Adaptive Sampling CMA-ES (AS-CMA), динамически регулирующий время оценки каждого кандидата для повышения эффективности и надежности оптимизации. Показано, что AS-CMA превосходит стандартный CMA-ES и байесовскую оптимизацию в сложных ландшафтах, обеспечивая более быструю сходимость и снижая общую стоимость оптимизации. Способен ли AS-CMA стать стандартным инструментом для решения задач оптимизации в реальных роботизированных системах с высоким уровнем шума?
Преодолевая Шум: Вызов Оптимизации в Реальном Мире
Многие задачи оптимизации, возникающие в реальных приложениях, таких как робототехника и биомеханика, осложняются присущим им уровнем шума в измеряемых данных. Этот шум может возникать из-за несовершенства сенсоров, случайных возмущений в окружающей среде или внутренней сложности исследуемой системы. Например, при управлении роботизированной рукой, неточность показаний датчиков положения суставов вносит погрешность в оценку текущего состояния, что затрудняет вычисление оптимальных управляющих воздействий. Подобные неточности приводят к тому, что оптимизационные алгоритмы сталкиваются не с гладким и предсказуемым ландшафтом, а с зашумленной поверхностью, где локальные минимумы и максимумы могут возникать из-за погрешностей измерений, а не из-за истинных свойств оптимизируемой функции. В результате, поиск глобального оптимума становится значительно сложнее и требует разработки специальных методов, устойчивых к шуму и способных эффективно работать в условиях неопределенности.
Традиционные методы оптимизации часто сталкиваются с серьезными трудностями при работе с зашумленными оптимизационными пространствами. Неизбежный шум в измерениях, характерный для реальных задач, приводит к тому, что алгоритмы либо сходятся крайне медленно, требуя чрезмерно большого количества итераций, либо выдают ненадежные решения, далекие от оптимальных. Это происходит из-за того, что шум искажает градиенты и гессианы, используемые для определения направления поиска, заставляя алгоритм совершать ошибочные шаги и отклоняться от истинного минимума целевой функции. В результате, даже при использовании сложных и усовершенствованных алгоритмов, получение точных и устойчивых результатов в условиях высокой неопределенности становится крайне проблематичным, требуя разработки новых подходов, способных эффективно справляться с этой сложностью.
Для эффективного преодоления оптимизационных ландшафтов, зашумленных измерениями, необходимы алгоритмы, демонстрирующие устойчивость к неопределенности и способные извлекать максимум пользы из ограниченного объема данных. Такие алгоритмы не просто стремятся к минимизации или максимизации целевой функции, но и учитывают статистические характеристики шума, позволяя отфильтровывать ложные сигналы и находить более надежные решения. Особое внимание уделяется методам, использующим вероятностные модели и байесовский подход, поскольку они позволяют оценивать не только оптимальное значение, но и степень уверенности в полученном результате. Использование техник машинного обучения, таких как обучение с подкреплением и гауссовские процессы, также способствует адаптации к меняющимся условиям и эффективному поиску оптимальных стратегий даже при недостатке информации.
Особую сложность задача оптимизации приобретает в контексте разработки экзоскелетов голеностопного сустава, предназначенных для помощи в движении. Точная оценка стоимости (или “функции потерь”) в подобных системах затруднена из-за множества факторов, включая индивидуальные особенности походки, непредсказуемые внешние воздействия и ограничения датчиков. Невозможность получить надежные данные о целесообразности конкретного алгоритма управления экзоскелетом приводит к необходимости использования методов, способных эффективно работать в условиях высокой неопределенности и с ограниченным объемом данных. В результате, оптимизация помощи, оказываемой экзоскелетом, становится сложной задачей, требующей инновационных подходов к преодолению шума и неточностей в измерениях.
Байесовский и Эволюционный Подходы к Устойчивости
Байесовская оптимизация обеспечивает высокую эффективность выборки за счет поддержания вероятностной ‘суррогатной модели’ целевой функции. Данная модель представляет собой аппроксимацию исследуемого пространства, позволяющую оценить стоимость в любой точке без фактического вычисления. В качестве суррогатной модели часто используются гауссовские процессы, которые предоставляют не только прогноз значения функции, но и оценку неопределенности этого прогноза. Использование вероятностной модели позволяет алгоритму учитывать не только текущие наблюдения, но и уверенность в этих наблюдениях, что особенно важно при работе с зашумленными данными или дорогостоящими вычислениями функции.
Комбинация вероятностной суррогатной модели и функции приобретения позволяет эффективно исследовать пространство параметров в условиях зашумленных данных. Функция приобретения определяет, какие точки пространства параметров наиболее перспективны для оценки, учитывая как предсказания суррогатной модели (эксплуатация), так и неопределенность этих предсказаний (исследование). Она оценивает потенциальную полезность каждой точки, максимизируя ожидаемое улучшение целевой функции или минимизируя риск получения неоптимального результата. Различные функции приобретения, такие как Expected Improvement (EI) или Upper Confidence Bound (UCB), используют различные стратегии для балансировки между исследованием и эксплуатацией, что позволяет оптимизировать процесс выборки и повысить эффективность поиска оптимального решения в зашумленной среде.
Эволюционные алгоритмы, такие как CMA-ES, функционируют путем итеративного уточнения распределения вероятностей кандидатов решений. В процессе оптимизации CMA-ES адаптирует ковариационную матрицу этого распределения, что позволяет алгоритму эффективно исследовать пространство поиска и приближаться к оптимальному решению. Адаптация ковариационной матрицы происходит на основе оценки успешности предыдущих итераций, позволяя алгоритму учитывать форму и характеристики оптимизируемого ландшафта. Этот процесс позволяет CMA-ES эффективно справляться с нелинейными и многомерными задачами оптимизации, подстраиваясь под особенности целевой функции и обеспечивая устойчивое схождение к локальному или глобальному оптимуму.
Стандартный алгоритм CMA-ES может демонстрировать неэффективность в условиях высокого уровня шума из-за некорректной адаптации ковариационной матрицы. Адаптация, направленная на оптимизацию шага поиска, основывается на оценке изменений в популяции кандидатов. При высоком уровне шума эти изменения могут быть случайными и не отражать истинную форму целевой функции, что приводит к ошибочной корректировке ковариационной матрицы. В результате, алгоритм может тратить вычислительные ресурсы на исследование неперспективных направлений, замедляя сходимость или приводя к субоптимальным решениям. Эффективность адаптации ковариационной матрицы напрямую зависит от соотношения сигнала к шуму, и при его снижении требуется применение дополнительных методов для повышения устойчивости алгоритма.
Адаптивная Выборка и Усиление Градиента Знаний
Метод ‘KL-KG CMA-ES’ является усовершенствованием стандартного CMA-ES за счет интеграции ‘градиента информации Кульбака-Лейблера’. Данный градиент оценивает информативность потенциальных кандидатов на основе их вероятности улучшения текущего решения и степени неопределенности, связанной с этими кандидатами. В отличие от стандартного CMA-ES, который выбирает кандидатов случайным образом в пределах ковариационной матрицы, ‘KL-KG CMA-ES’ направляет процесс поиска в области, где ожидается наибольшее снижение стоимости или увеличение целевой функции, тем самым повышая эффективность исследования пространства поиска и ускоряя сходимость алгоритма.
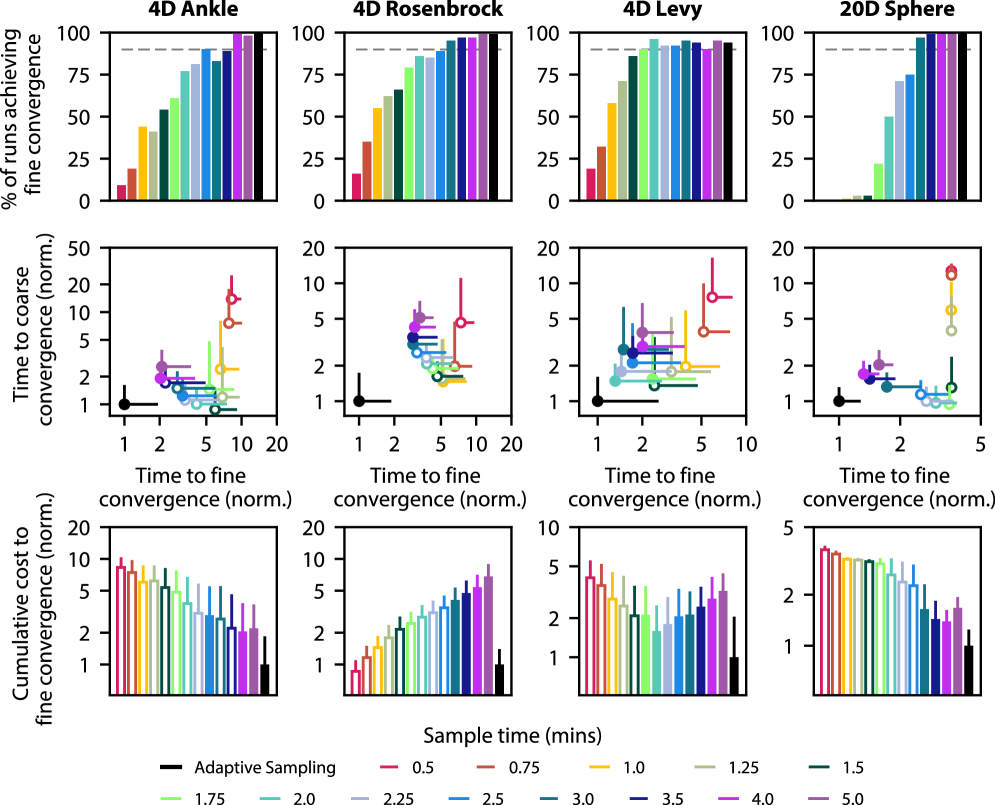
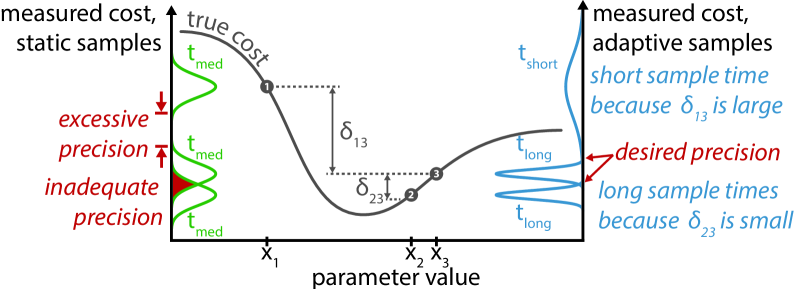
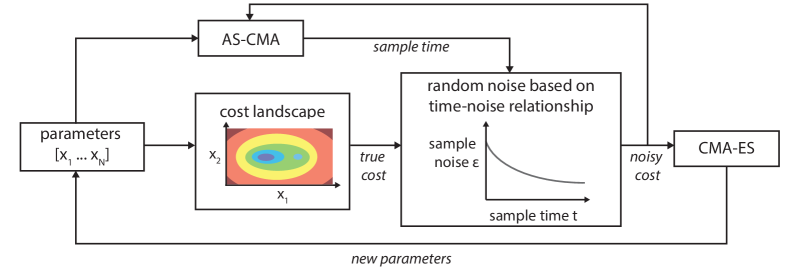
Алгоритм AS-CMA усовершенствует подход к выборочной оптимизации путем динамического распределения времени выборки на основе оценки расхождения в стоимости. Это позволяет алгоритму концентрировать вычислительные ресурсы на наиболее информативных участках пространства поиска, где ожидается наибольшее снижение стоимости функции. В отличие от статических методов, где количество выборок распределяется равномерно или предопределенным образом, AS-CMA адаптирует распределение в процессе оптимизации, что приводит к повышению эффективности и ускорению сходимости. Оценка расхождения в стоимости служит индикатором потенциальной выгоды от дополнительных выборок в конкретной области, обеспечивая более рациональное использование вычислительных ресурсов.
Методы адаптивной выборки, такие как AS-CMA и KL-KG CMA-ES, учитывают влияние шума измерений, что существенно повышает их устойчивость и ускоряет сходимость по сравнению с наивными реализациями. В отличие от алгоритмов, предполагающих точные оценки целевой функции, данные подходы явно моделируют и компенсируют случайные отклонения в измеряемых значениях. Это позволяет снизить вероятность ошибочных решений при выборе кандидатов для оценки и более эффективно использовать вычислительные ресурсы, особенно в задачах, где шум измерений является значительным фактором. Учет шума измерений позволяет алгоритмам более надежно определять перспективные направления поиска и избегать зацикливания на локальных оптимумах, вызванных неточными данными.
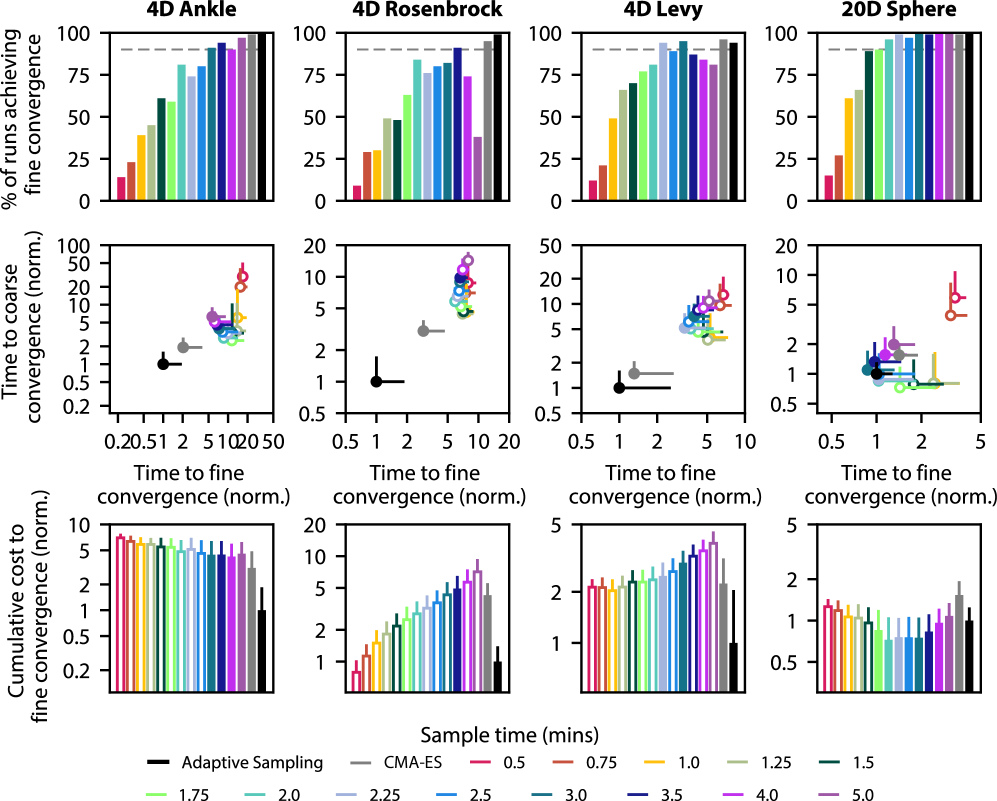
Адаптивные стратегии выборки, используемые в данных алгоритмах, обеспечивают повышение эффективности оптимизации и надежности сходимости. В ходе тестирования на четырех различных ландшафтах функций стоимости, наблюдалось ускорение времени сходимости на 24-65% и снижение совокупной стоимости достижения сходимости на 29-76% по сравнению с лучшими вариантами CMA-ES, использующими статическую выборку. Важно отметить, что в ходе 400 тестовых запусков была достигнута 100% надежность сходимости, что подтверждает устойчивость и предсказуемость предлагаемых методов.
Влияние на Реальные Роботизированные Системы
Достижения в области оптимизации напрямую влияют на повышение эффективности управления роботами и моделирования биомеханических систем. Усовершенствованные алгоритмы позволяют создавать более точные и отзывчивые системы управления, что особенно важно для сложных задач, таких как ходьба, манипулирование объектами и взаимодействие с окружающей средой. В биомеханическом моделировании эти оптимизационные методы способствуют созданию более реалистичных и точных моделей человеческого движения, что находит применение в протезировании, реабилитации и спортивной науке. Улучшенная оптимизация параметров позволяет адаптировать роботов и биомеханические модели к индивидуальным потребностям и условиям эксплуатации, открывая новые возможности для персонализированной медицины и роботизированной помощи.
Оптимизация параметров устройств помощи, таких как экзоскелеты для голеностопного сустава, становится значительно эффективнее и надежнее благодаря новым алгоритмам. Это позволяет создавать более персонализированные и адаптивные системы, улучшающие пользовательский опыт. Например, точная настройка параметров экзоскелета позволяет обеспечить оптимальную поддержку при ходьбе, снизить нагрузку на суставы и мышцы, а также повысить эффективность движений. Более быстрая и точная оптимизация также упрощает процесс адаптации устройства к индивидуальным особенностям пользователя, учитывая его вес, скорость ходьбы и другие параметры. В результате, такие устройства становятся более удобными в использовании и способствуют улучшению качества жизни людей с ограниченными возможностями или нуждающихся в дополнительной поддержке при движении.
Возможность эффективной обработки зашумленных данных открывает новые перспективы для создания более надежных систем управления роботами, особенно в неструктурированных средах. Исследования показывают, что алгоритмы, способные фильтровать помехи и неточности в сенсорных данных, позволяют роботам адаптироваться к реальным условиям, где неизбежны ошибки измерений и непредсказуемые факторы. Это особенно важно для роботов, работающих в сложных локациях, таких как строительные площадки, спасательные операции или домашняя среда, где качество данных может значительно варьироваться. Повышенная устойчивость к шумам позволяет роботам выполнять задачи с большей точностью и безопасностью, снижая риск сбоев и повышая общую эффективность работы.
Ускорение скорости сходимости оптимизационных алгоритмов открывает новые возможности для быстрой разработки и адаптации роботизированных систем к индивидуальным потребностям и изменяющимся условиям. Исследования показали, что алгоритм AS-CMA демонстрирует значительно более высокую эффективность — до 67% и 76% превосходящий показатели KL-KG CMA-ES в трех из четырех протестированных ландшафтов затрат. Это означает, что прототипирование и настройка робототехнических устройств, включая вспомогательные приспособления, такие как экзоскелеты для голеностопного сустава, может осуществляться значительно быстрее и точнее, обеспечивая более персонализированный и эффективный пользовательский опыт. Повышенная скорость сходимости также позволяет роботам более эффективно адаптироваться к непредсказуемым ситуациям и шумным данным, что крайне важно для работы в реальных, неструктурированных средах.

Представленное исследование демонстрирует, что адаптивное семплирование в процессе оптимизации, как предложено в AS-CMA, позволяет существенно повысить надежность и эффективность алгоритмов, работающих в условиях зашумленных данных. Этот подход, динамически подстраивающий время измерения для каждого кандидата, напоминает о фундаментальной идее Клода Шеннона: «Информация — это не абсолютная величина, а мера уменьшения неопределенности». Подобно тому, как Шеннон стремился максимизировать передачу информации в зашумленных каналах, данная работа направлена на максимизацию полезного сигнала в процессе оптимизации, эффективно фильтруя шум и приближая систему к оптимальному решению. Очевидно, что время, в контексте данной работы, является не просто метрикой, а средой, в которой система эволюционирует и адаптируется.
Что Дальше?
Представленная работа, демонстрируя адаптивное семплирование в алгоритме CMA-ES, лишь временно сглаживает шероховатости неизбежной энтропии. Ускорение сходимости и повышение надежности в зашумленных средах — это не достижение абсолютной стабильности, а лишь отсрочка распада системы во времени. Каждая оптимизация — это временное состояние, иллюзия порядка, кэшированная вычислительными ресурсами.
Более глубокое исследование должно быть направлено не на борьбу с шумом, а на его интеграцию в процесс оптимизации. Вопрос не в том, чтобы исключить задержку — налог, который платит каждый запрос — а в том, как её учитывать и использовать для формирования более робастных стратегий. Следующим шагом видится переход от адаптивного семплирования к адаптивному моделированию самой среды, предсказывающей и компенсирующей будущие возмущения.
В конечном итоге, все системы стареют. Задача исследователя — не создать вечный двигатель, а спроектировать достойное старение, алгоритм, способный извлекать пользу даже из хаоса и неопределенности. Иными словами, не стремиться к абсолютной точности, а к изящной адаптации к неизбежному распаду.
Оригинал статьи: https://arxiv.org/pdf/2601.09594.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Язык тела под присмотром ИИ: архитектура и гарантии
- Согласие роя: когда разум распределён, а ошибки прощены.
- Разбираемся с разреженными автокодировщиками: Действительно ли они учатся?
- Квантовый импульс для несбалансированных данных
- Искусственный интеллект в разговоре: что обсуждают друг с другом AI?
- Безопасность генерации изображений: новый вектор управления
- Очарование в огненном вихре: Динамика очарованных кварков в столкновениях тяжелых ионов
- Умная экономия: Как сжать ИИ без потери качества
- Видеовопросы и память: Искусственный интеллект на грани
- Эволюция под контролем: эксперименты с обучением с подкреплением в генетическом программировании
2026-01-15 22:37