Автор: Денис Аветисян
Новый подход объединяет обучение с подкреплением и генерацию видео, чтобы создавать более правдоподобные и физически корректные анимации и симуляции.
PhysRVG: Физически осознанное обучение с подкреплением для генерации видео, использующее цикл имитации и открытия для реалистичного моделирования движения твердых тел.
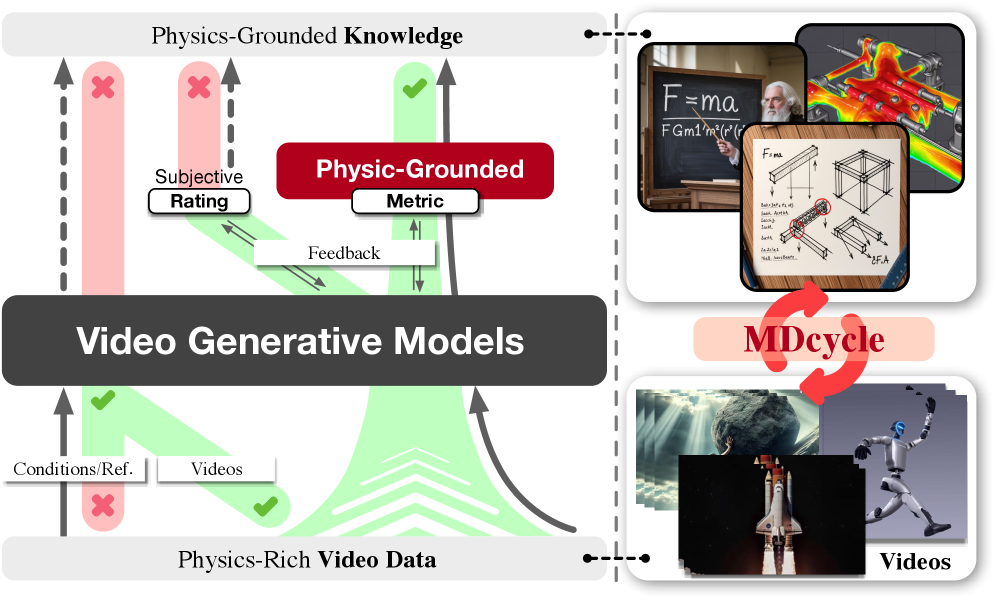
Несмотря на фундаментальную роль физических принципов в реалистичной визуальной симуляции, современные генеративные модели видео часто игнорируют их, особенно в отношении динамики твердых тел. В данной работе, ‘PhysRVG: Physics-Aware Unified Reinforcement Learning for Video Generative Models’, предложен новый подход, объединяющий обучение с подкреплением и цикл «Подражание-Открытие» (Mimicry-Discovery Cycle), для непосредственной интеграции физических ограничений в процесс генерации видео. Это позволяет существенно повысить реалистичность динамики объектов, сохраняя при этом способность модели к обучению и адаптации. Возможно ли, используя подобный подход, создать генеративные модели, неотличимые от реальных физических процессов?
За пределами Данных: Ограничения Традиционной Генерации Видео
Существующие методы генерации видео, такие как V2V модели, часто демонстрируют недостаток физической правдоподобности, что приводит к неестественным движениям и взаимодействиям. Эти системы, обученные на больших объемах данных, могут успешно воспроизводить увиденное, однако испытывают трудности при создании принципиально новых сценариев или обеспечении соответствия фундаментальным законам физики. В результате, сгенерированные видео могут содержать визуальные артефакты, такие как объекты, нарушающие гравитацию, или движения, невозможные в реальном мире. Это ограничивает применение подобных технологий в областях, требующих высокой степени реализма, например, в симуляциях или при разработке систем управления роботами, где точность и соответствие физическим законам имеют решающее значение.
Современные методы генерации видео, опирающиеся исключительно на анализ больших объемов данных, часто демонстрируют ограниченные возможности применительно к новым, ранее не встречавшимся ситуациям. Обучение на основе данных позволяет воссоздать наблюдаемые паттерны, однако не обеспечивает понимания фундаментальных физических принципов, управляющих движением и взаимодействием объектов. В результате, модели испытывают трудности при экстраполяции за пределы обучающей выборки, что приводит к появлению нереалистичных движений и нарушению физической правдоподобности. Отсутствие встроенных ограничений, обусловленных законами физики, делает сгенерированные видео менее убедительными и ограничивает их применимость в областях, требующих высокой степени реалистичности, таких как симуляции и робототехника.
Отсутствие учета законов физики в алгоритмах генерации видео приводит к появлению заметных визуальных дефектов и снижению реалистичности происходящего. Создаваемые изображения зачастую демонстрируют неправдоподобное движение объектов и их взаимодействие, что существенно ограничивает возможности применения подобных технологий в областях, требующих высокой степени достоверности. В частности, в реалистичных симуляциях и роботизированных системах, где точность моделирования физического мира критически важна, подобный недостаток может привести к непредсказуемым результатам и снижению эффективности. Неспособность учитывать базовые физические принципы, такие как гравитация, инерция или столкновения, приводит к созданию видеоматериалов, которые, хотя и визуально привлекательны, не соответствуют реальным физическим явлениям, что делает их непригодными для серьезных научных исследований или практического применения.
PhysRVG: Внедрение Физики в Генерацию Видео
PhysRVG представляет собой новую структуру, использующую обучение с подкреплением (Reinforcement Learning) для управления генерацией видео, с целью обеспечения физической реалистичности. В отличие от традиционных генеративных моделей, PhysRVG не просто воспроизводит визуальные паттерны из обучающих данных, но и активно оценивает и корректирует генерируемые кадры на основе физических принципов. Это достигается за счет разработки функции вознаграждения (reward function), которая оценивает, насколько сгенерированное видео соответствует законам физики, таким как гравитация, инерция и сохранение энергии. В результате, система способна генерировать видеоролики, в которых объекты взаимодействуют друг с другом более правдоподобно и естественно, избегая типичных артефактов, возникающих при использовании стандартных методов генерации видео.
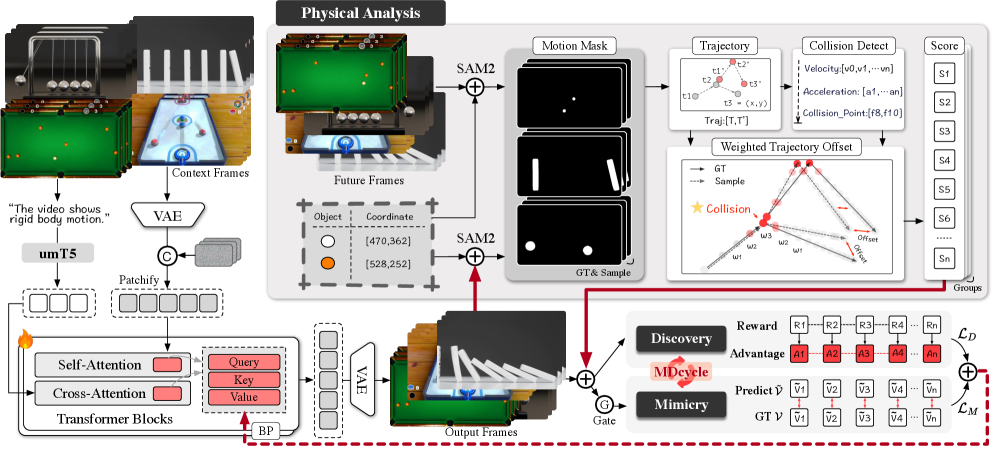
В основе PhysRVG лежит архитектура Transformer, обеспечивающая генерацию видео последовательностей. Для повышения физической достоверности сгенерированных сцен, стандартная архитектура Transformer расширена за счет функции вознаграждения, учитывающей физические законы. Эта функция оценивает каждый сгенерированный кадр на соответствие принципам физики, таким как сохранение энергии и импульса, и предоставляет сигнал обратной связи для обучения модели. Использование функции вознаграждения позволяет системе корректировать генерируемые кадры, минимизируя физически нереалистичные явления и повышая общую правдоподобность видео.
В основе PhysRVG лежит инновационный цикл “Мимикрия-Открытие”, предназначенный для обеспечения стабильности и эффективности обучения генеративной модели. Этот цикл состоит из чередующихся фаз: на фазе “Мимикрия” модель обучается имитации наблюдаемых данных, стремясь воспроизвести визуальные паттерны из обучающего набора. На фазе “Открытие” модель использует полученные знания для исследования пространства возможных решений, оптимизируя параметры в соответствии с физически обоснованной функцией вознаграждения. Такое чередование позволяет модели не только точно воспроизводить существующие видео, но и обобщать знания, создавая реалистичные видео, соответствующие законам физики, даже в ситуациях, не представленных в обучающей выборке.
Количественная Оценка Реализма: Физически Обоснованная Функция Вознаграждения
В основе PhysRVG лежит функция вознаграждения, основанная на физической правдоподобности (Physics-Grounded Reward), которая оценивает сгенерированные видео, анализируя соответствие их физическим законам. Данная функция позволяет количественно оценивать реалистичность движения объектов и их взаимодействия в видеоряде. Оценка производится путем анализа различных физических параметров, что позволяет отличать правдоподобные видео от тех, которые содержат физически невозможные события. Использование данной метрики позволяет системе обучения Reinforcement Learning генерировать более реалистичные и правдоподобные видео.
Функция вознаграждения PhysRVG оценивает правдоподобность генерируемых видео посредством метрик, измеряющих точность движения и взаимодействия объектов. В частности, используется метрика «Смещение траектории» (Trajectory Offset), которая количественно определяет отклонение траекторий объектов от физически реалистичных путей. Кроме того, применяется «Обнаружение столкновений» (Collision Detection) для выявления нефизичных пересечений объектов, что позволяет оценить корректность физических взаимодействий в видео. Обе метрики используются для расчета численного значения, отражающего степень соответствия сгенерированного видео законам физики.
Оптимизация обучения политики подкрепления в PhysRVG достигается за счет использования алгоритма Group Relative Policy Optimization (GRPO). GRPO позволяет стабилизировать процесс обучения и значительно ускорить сходимость политики, что критически важно для задач генерации видео, требующих высокой точности и реалистичности. В отличие от стандартных алгоритмов, GRPO использует относительные изменения в параметрах политики внутри группы агентов, что снижает дисперсию градиентов и обеспечивает более стабильное обучение даже при сложных динамических сценах и большом количестве взаимодействующих объектов. Такой подход позволяет эффективно обучать политику, генерирующую физически правдоподобные видеоролики, за разумное время.

Валидация и Бенчмаркинг: Оценка Физической Реалистичности
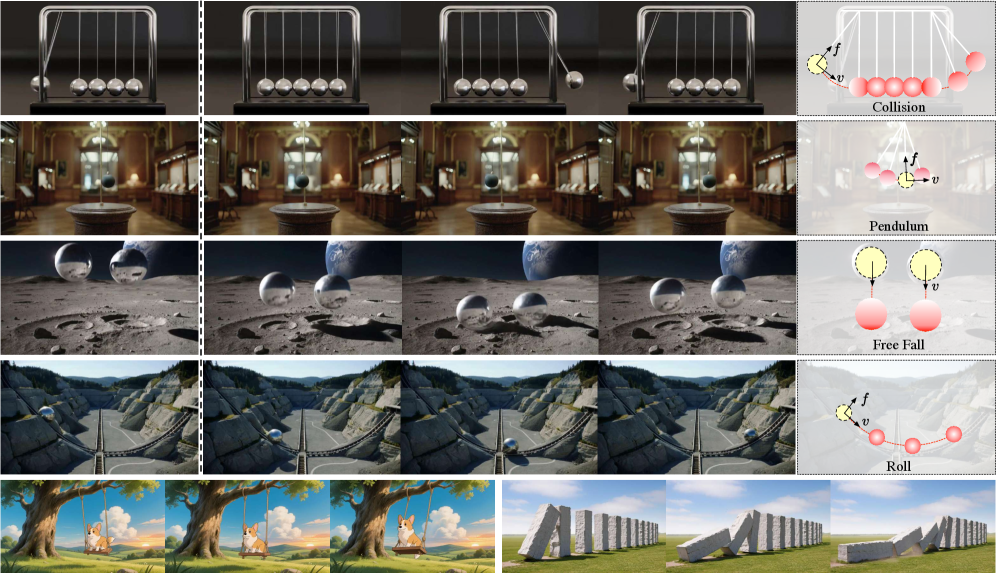
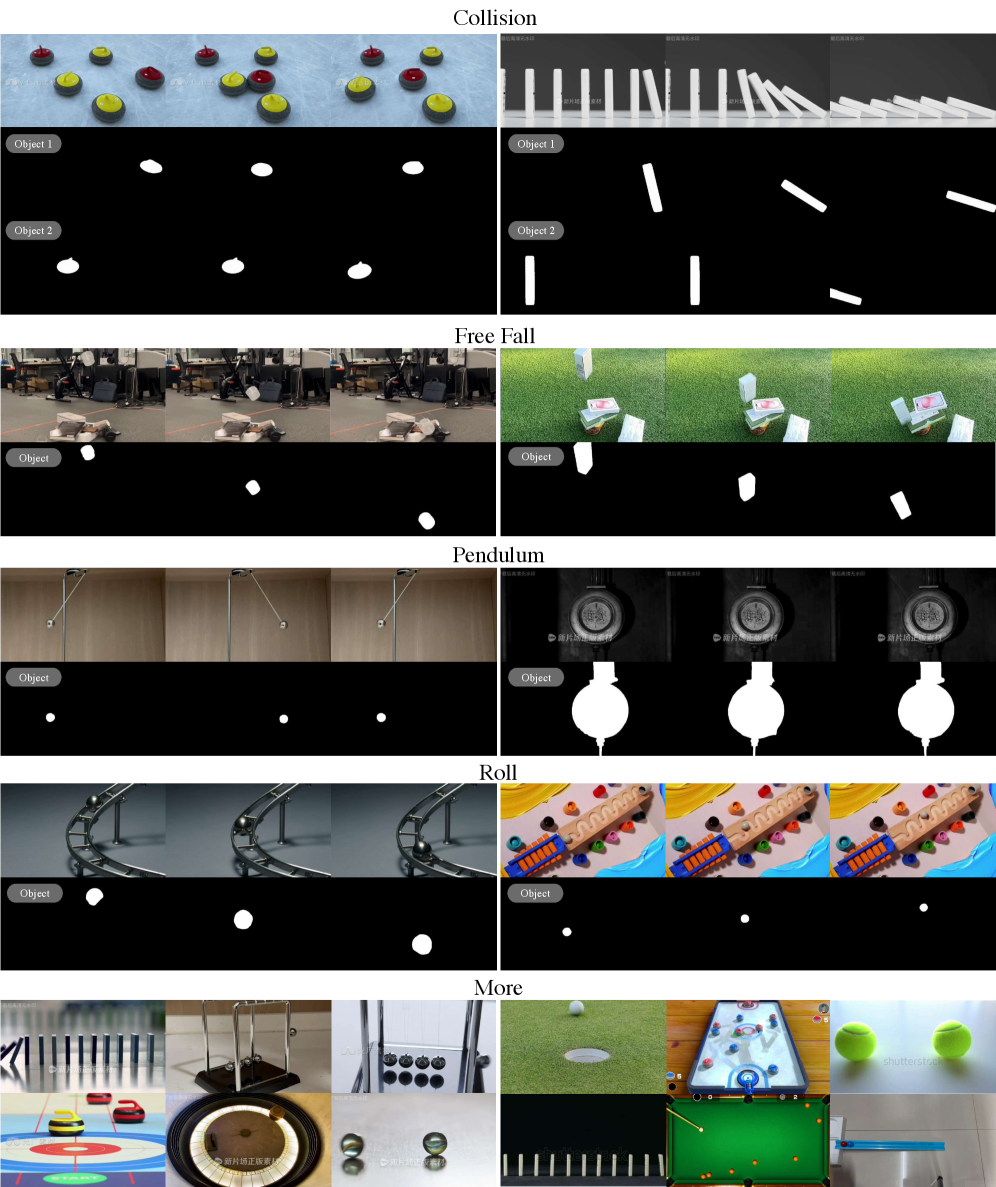
Представлен PhysRVGBench — новый эталонный набор данных, разработанный специально для оценки реалистичности сгенерированных видео, с акцентом на динамику твёрдых тел. Данный набор данных призван обеспечить объективную метрику для оценки качества симуляции физических процессов в сгенерированном видеоконтенте. В отличие от существующих решений, PhysRVGBench ориентирован на оценку не только визуальной правдоподобности, но и соответствия сгенерированных движений законам физики, что позволяет более точно оценивать прогресс в области генерации реалистичных видео с использованием искусственного интеллекта. Набор данных включает в себя разнообразные сценарии движения твёрдых тел, что обеспечивает всестороннюю оценку алгоритмов и позволяет выявлять слабые места в существующих методах симуляции.
Для количественной оценки реалистичности сгенерированных видео используется новый набор метрик, включающий в себя пересечение-над-объединением (IoU) и отклонение траектории. IoU позволяет точно измерить степень совпадения сгенерированных объектов с реальными, в то время как отклонение траектории оценивает соответствие движения этих объектов физическим законам. Результаты экспериментов демонстрируют, что применение данных метрик выявляет значительное превосходство нового подхода над существующими методами генерации видео, обеспечивая более точную и физически правдоподобную симуляцию движения твердых тел. Такой подход позволяет объективно сравнивать различные алгоритмы и стимулирует дальнейшее развитие технологий создания реалистичных видеоматериалов.
Эксперименты показали, что PhysRVG значительно превосходит традиционные методы в генерации физически правдоподобных видео, достигая передовых результатов. Оценка, проведенная на специально разработанном датасете PhysRVGBench, продемонстрировала существенное улучшение ключевых метрик — IoU (Intersection over Union) и Trajectory Offset. Повышение этих показателей указывает на более точное воспроизведение движения твердых тел в сгенерированных видеороликах, что подтверждает способность PhysRVG создавать визуально реалистичные и физически достоверные сцены. Полученные данные свидетельствуют о значительном прогрессе в области генерации видео и открывают новые возможности для создания высококачественного контента, требующего соблюдения законов физики.
Исследование, представленное в данной работе, демонстрирует стремление к созданию видео генеративных моделей, обладающих не только высоким качеством изображения, но и физической достоверностью. Авторы предлагают подход PhysRVG, в котором обучение с подкреплением интегрируется с циклом имитации-открытия для улучшения реалистичности движения жестких тел. Как отмечал Дэвид Марр: «Понимание системы — это исследование её закономерностей». Данный принцип находит отражение в стремлении авторов моделировать физические ограничения, что позволяет создавать более правдоподобные и воспроизводимые видео, где движение объектов подчиняется законам физики. Акцент делается на объяснимости модели, поскольку физические принципы служат основой для генерации видео, а не просто эмпирические закономерности.
Что Дальше?
Представленная работа, несомненно, демонстрирует потенциал интеграции принципов физики непосредственно в процессы обучения генеративных моделей видео. Однако, кажущееся упрощение сложной реальности через рамки жестких тел — это, скорее, первый шаг, нежели окончательное решение. Каждое сгенерированное изображение скрывает структурные зависимости, которые необходимо выявить и учесть. Вопрос заключается не в создании “реалистичных” видео, а в понимании, какие именно аспекты физического мира критичны для восприятия и как их эффективно моделировать. Очевидно, что расширение рамок жестких тел до деформируемых объектов, флюидов и сложных взаимодействий — следующая неизбежная ступень.
Интересно отметить, что акцент на “имитации-открытии” — это не просто технический прием, а отражение фундаментального принципа научного познания. Необходимо осознавать, что интерпретация моделей важнее красивых результатов. Следует переосмыслить метрики оценки, отказавшись от субъективных оценок “реалистичности” в пользу количественной оценки соответствия физическим законам и предсказуемости поведения объектов в моделируемой среде.
В конечном итоге, будущее исследований, вероятно, связано с разработкой универсальных фреймворков, способных интегрировать различные типы физических симуляций и данных, полученных из реального мира. Создание “физически осведомленных” агентов, способных к автономному обучению и адаптации, представляется не просто технологической задачей, но и философским вызовом — попыткой воссоздать фрагмент реальности в цифровом пространстве.
Оригинал статьи: https://arxiv.org/pdf/2601.11087.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Устойчивое обучение языковых моделей: новый подход к контролю стратегии
- Квантовый усилитель света на чипе: новый уровень эффективности
- Самообучающиеся системы: новый подход к созданию многоагентных взаимодействий
- Взгляд под капот: Анализ кода, сгенерированного нейросетями
- Квантовые системы в полуклассическом режиме: новый подход к моделированию
- Сердце музыки: открытые модели для создания композиций
- 💸 Великобритания тратит 500 миллионов фунтов стерлингов на квантовые технологии – может быть, кот Шрёдингера только что разбогател?
- Квантовые Загадки: От «Призрачного Действия на Расстоянии» к Суперкомпьютерам
- Самообучающиеся агенты: как выявлять и исправлять ошибки
- Графы в словах: новый подход к представлению данных
2026-01-19 15:40