Автор: Денис Аветисян
Исследователи представили модель Being-H0.5, позволяющую роботам эффективно переносить навыки между разными типами корпусов благодаря обучению на больших объемах данных, созданных людьми.
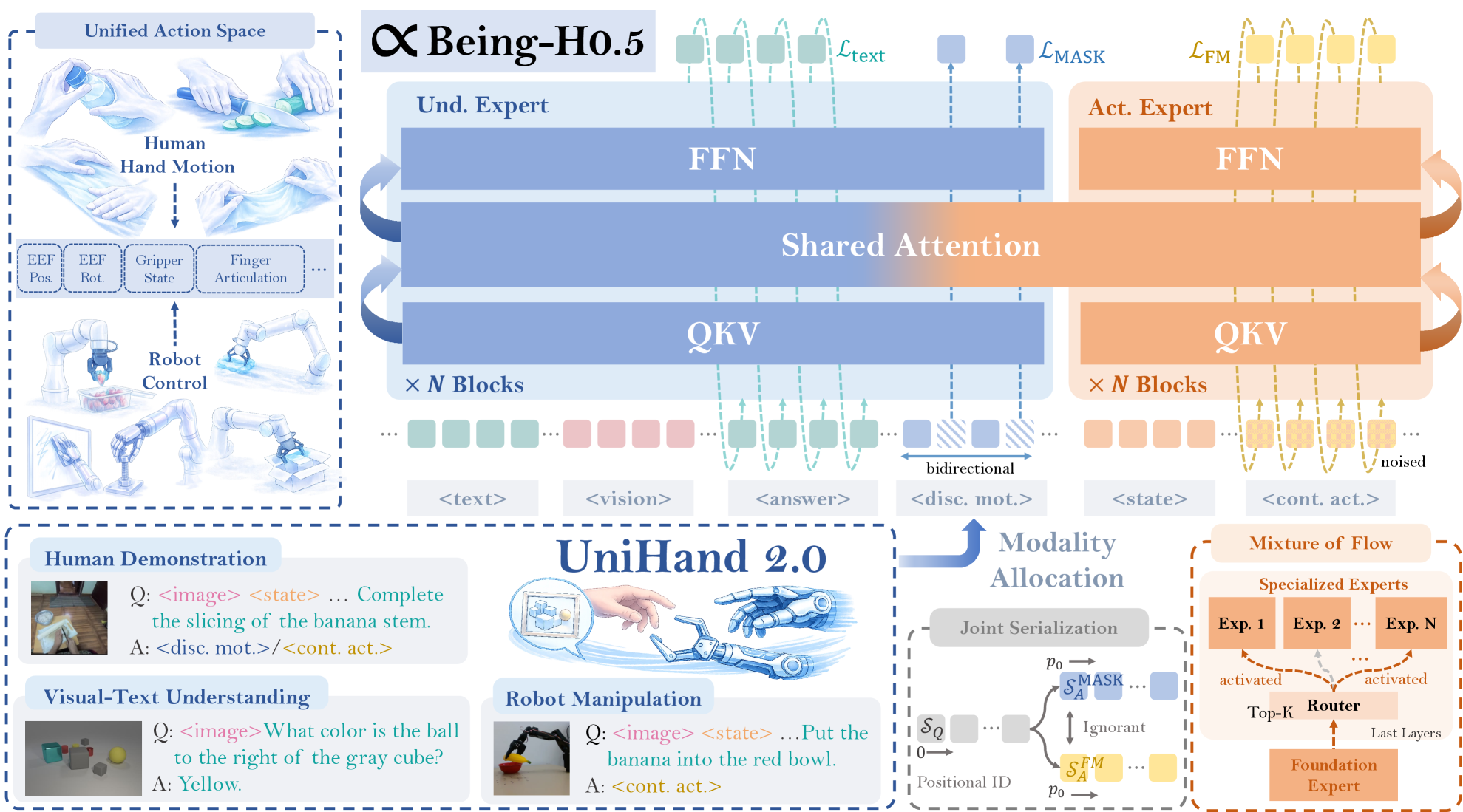
Представлена основанная на трансформерах модель Being-H0.5, демонстрирующая обобщение между различными воплощениями роботов и обеспечивающая управление в реальном времени благодаря крупномасштабному претренингу и унифицированному пространству действий.
Несмотря на значительные успехи в области робототехники, обеспечение обобщения навыков между различными роботизированными платформами остается сложной задачей. В работе ‘Being-H0.5: Scaling Human-Centric Robot Learning for Cross-Embodiment Generalization’ представлена новая фундаментальная модель \text{Being-H0.5}, использующая человеко-центричный подход к обучению и крупномасштабное предварительное обучение для достижения высокой степени обобщения и совместимости между различными роботами. Ключевым нововведением является унифицированное пространство действий и архитектура на основе Mixture-of-Transformers, позволяющие эффективно переносить навыки, полученные от человека, на различные платформы. Возможно ли, используя подобные подходы, создать универсального робота, способного адаптироваться к любой среде и выполнять широкий спектр задач?
Преодолевая разрыв воплощения: необходимость унифицированной робототехники
Традиционная робототехника часто сталкивается с трудностями при обобщении опыта, полученного на одной платформе, для применения в различных условиях и на других робототехнических системах. Это связано с тем, что алгоритмы управления и восприятия, как правило, жестко привязаны к конкретной аппаратной конфигурации и сенсорному оборудованию. Например, робот, обученный ориентироваться в помещении с использованием лидара, может испытывать значительные трудности при переходе на улицу или при использовании камеры вместо лидара. Данное ограничение существенно замедляет процесс внедрения робототехники в реальные условия, поскольку требует значительных усилий по адаптации и перенастройке для каждого нового случая применения, препятствуя масштабируемости и широкому распространению робототехнических решений.
Отсутствие единой, универсальной платформы для робототехники серьезно затрудняет перенос приобретенных навыков и знаний между различными роботизированными системами. В настоящее время каждый робот, независимо от его назначения — будь то манипулятор, мобильная платформа или антропоморфный робот — требует индивидуальной настройки и обучения, даже если задачи, которые он должен выполнять, схожи. Это связано с тем, что существующие подходы часто тесно связаны с конкретным аппаратным обеспечением и кинематикой, что препятствует созданию обобщенных алгоритмов и моделей. Как следствие, инновации, достигнутые для одной роботизированной платформы, не могут быть легко перенесены на другие, замедляя прогресс и ограничивая возможности масштабирования робототехнических решений в реальном мире. Разработка такой унифицированной основы позволит значительно ускорить исследования и разработки, создавая условия для более гибких и адаптивных роботизированных систем.
Современные подходы к роботизированным системам часто сталкиваются с необходимостью трудоемкой перенастройки при переносе навыков на новые роботизированные платформы. Этот процесс, требующий значительных временных и вычислительных ресурсов, существенно ограничивает масштабируемость и практическое применение роботов в реальных условиях. Каждая новая роботизированная модель, отличающаяся кинематикой, динамикой или сенсорным оборудованием, требует индивидуальной калибровки и оптимизации алгоритмов управления. В результате, разработанные для одной платформы решения не могут быть эффективно перенесены на другую, что замедляет прогресс в области робототехники и препятствует широкому внедрению роботов в различные сферы жизни. Отсутствие универсальных методов адаптации и переобучения является ключевым барьером для создания действительно гибких и приспосабливаемых роботизированных систем.
Being-H0.5: Основа для обучения роботов, преодолевающего границы воплощения
Модель Being-H0.5 использует структуру Vision-Language-Action (VLA) для обработки инструкций и генерации последовательных действий. Данный подход предполагает одновременную обработку визуальной информации (изображений), лингвистических команд на естественном языке и последующее преобразование этих данных в конкретные моторные команды для робота. VLA-фреймворк позволяет модели понимать семантическое содержание инструкций, сопоставлять их с визуальным окружением и планировать действия, необходимые для выполнения поставленной задачи. Это достигается за счет интеграции модулей компьютерного зрения, обработки естественного языка и управления движением в единую архитектуру, что обеспечивает согласованность и логичность генерируемых действий.
Модель Being-H0.5 использует унифицированное пространство действий, что позволяет осуществлять бесшовную передачу выученных моделей поведения между роботами с различной морфологией. Это достигается за счет представления всех возможных действий в едином, стандартизированном формате, независимо от конкретной конструкции робота. Такой подход позволяет обученной модели адаптироваться к новым роботам без необходимости переобучения или внесения существенных изменений в архитектуру. Унифицированное пространство действий включает в себя как низкоуровневые команды управления моторами, так и высокоуровневые инструкции, что обеспечивает гибкость и обобщающую способность модели.
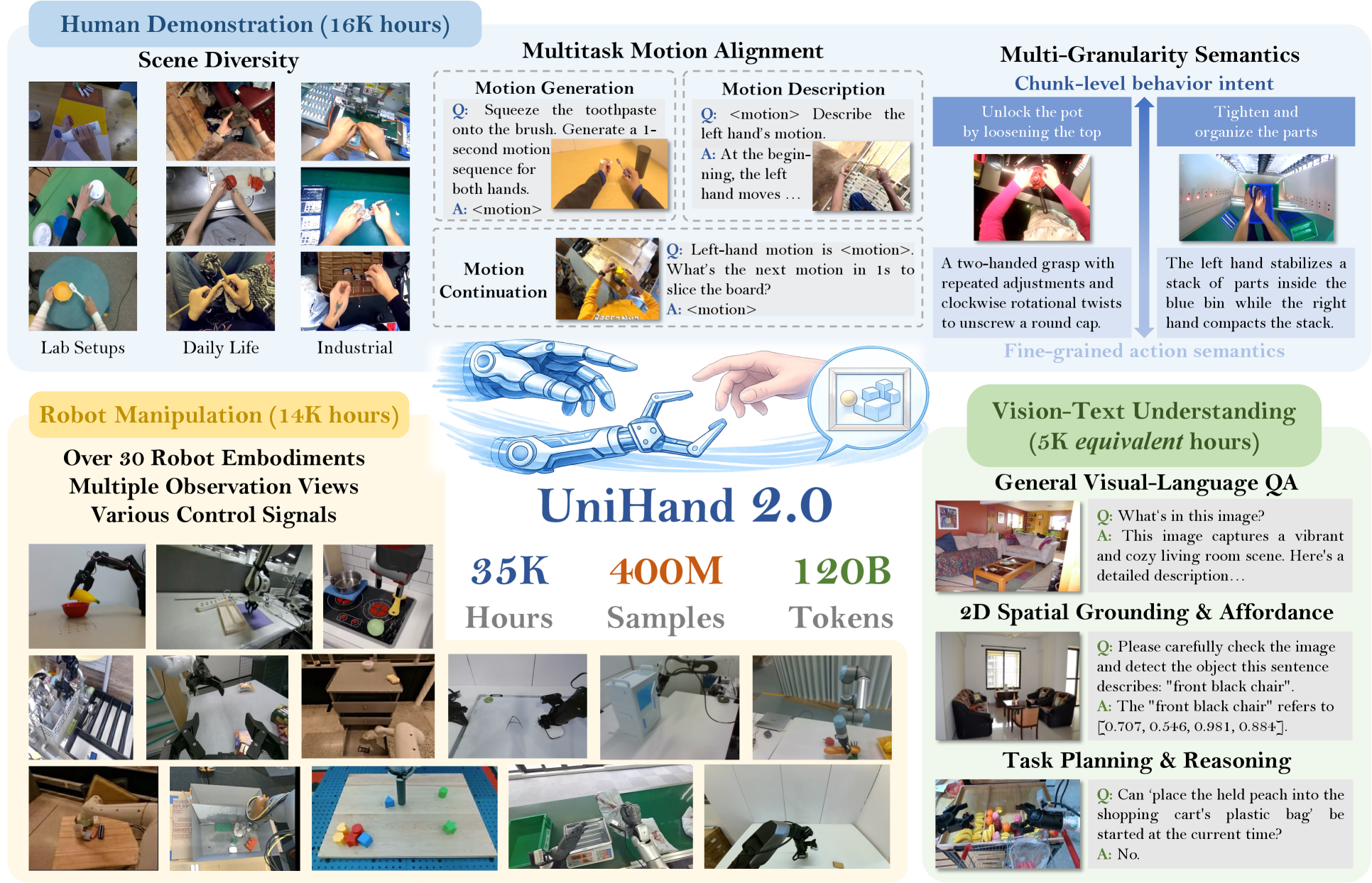
Обучение модели Being-H0.5 осуществляется посредством обучения, ориентированного на человека (Human-Centric Learning), с использованием масштабного набора данных демонстраций действий людей, собранных в рамках проекта UniHand-2.0. Этот подход позволяет модели получать плотные априорные знания о физике взаимодействия с окружающим миром, что значительно улучшает её способность к обобщению и адаптации к новым задачам и робототехническим платформам. Данные UniHand-2.0 содержат информацию о движениях рук человека, выполняющих разнообразные манипуляции, что предоставляет модели необходимые знания для формирования реалистичных и эффективных стратегий управления.
Архитектура Being-H0.5 построена на основе Mixture of Transformers (MoT), что позволяет разделить обработку мультимодальной информации (зрение, язык) и управление низкоуровневым выполнением действий. MoT использует несколько независимых блоков Transformer, каждый из которых специализируется на определенных аспектах задачи. Это разделение позволяет модели эффективно обрабатывать сложные инструкции, интерпретировать сенсорные данные и генерировать координированные движения, при этом снижая вычислительную сложность по сравнению с монолитными архитектурами. Разделение на отдельные модули способствует улучшению обобщающей способности и упрощает процесс обучения, поскольку каждый блок может быть обучен независимо или с использованием различных стратегий обучения.
Стабилизация генерации действий: MPG и выпрямленный поток
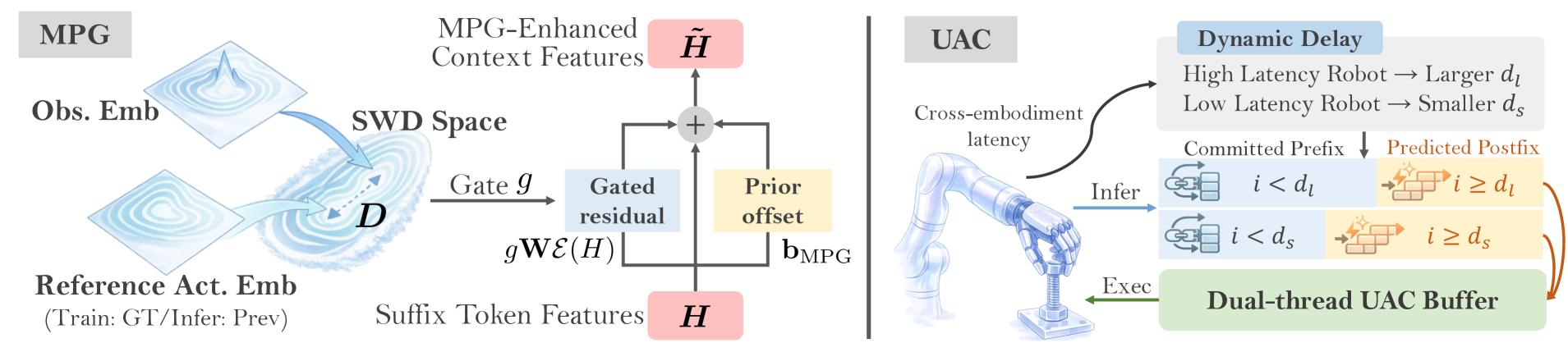
Для повышения устойчивости генерации действий в динамически изменяющихся средах, была разработана технология Manifold-Preserving Gating (MPG). MPG представляет собой механизм, предназначенный для смягчения влияния ненадёжного контекста и сдвигов в распределении данных, возникающих при работе в реальных условиях. Технология позволяет сохранять согласованность и предсказуемость генерируемых действий, даже при наличии шумов и неточностей во входных данных. MPG функционирует как фильтр, который ограничивает пространство возможных действий, фокусируясь на наиболее вероятных и стабильных решениях, тем самым предотвращая генерацию нереалистичных или нежелательных результатов.
Механизм Manifold-Preserving Gating (MPG) стабилизирует генерацию действий за счет снижения влияния ненадежного контекста и сдвигов в распределении данных. MPG осуществляет это путем сохранения структуры многообразия, на котором определены допустимые действия, что позволяет уменьшить отклонения в выходных последовательностях, вызванные неточностями во входных данных или изменениями в окружающей среде. По сути, MPG действует как фильтр, уменьшая амплитуду нежелательных изменений в генерации действий, сохраняя при этом общую последовательность и согласованность.
Rectified Flow представляет собой итеративный процесс шумоподавления, предназначенный для улучшения качества генерируемых последовательностей действий. В рамках этого процесса, начальная последовательность действий подвергается многократному уточнению путем последовательного удаления шума и неточностей. Каждая итерация включает в себя анализ текущей последовательности, выявление областей, требующих улучшения, и внесение корректировок для повышения её согласованности и реалистичности. Данный подход позволяет постепенно приближаться к оптимальной последовательности действий, повышая надежность и плавность генерируемого поведения.
Интеграция Manifold-Preserving Gating (MPG) в Rectified Flow приводит к существенному повышению устойчивости и согласованности генерируемых действий. В частности, применение MPG позволяет минимизировать влияние нестабильного контекста и сдвигов в распределении данных на процесс генерации, обеспечивая более предсказуемые и надежные результаты. Экспериментальные данные демонстрируют, что комбинация MPG и Rectified Flow значительно снижает количество аномальных или нежелательных действий, особенно в динамичных и непредсказуемых окружениях, улучшая общую производительность и надежность системы.
Управление в реальном времени с помощью Universal Async Chunking
Для решения проблем, связанных с асинхронным восприятием и управлением в робототехнике, была разработана универсальная асинхронная группировка (UAC). Данный подход позволяет эффективно обрабатывать задержки, неизбежно возникающие при взаимодействии датчиков и исполнительных механизмов, что особенно важно в гетерогенных робототехнических системах. UAC разбивает сложные задачи на небольшие, независимые фрагменты, позволяя их параллельное выполнение и минимизируя общее время отклика. Эта методика обеспечивает более предсказуемое и надежное поведение робота, даже в условиях высокой вычислительной нагрузки и нестабильной связи, что критически важно для реализации сложных алгоритмов управления в реальном времени.
Универсальная асинхронная фрагментация (UAC) позволяет добиться управления в реальном времени на разнородных роботизированных платформах благодаря эффективной обработке задержек выполнения. Вместо ожидания завершения каждой операции перед началом следующей, UAC разбивает задачи на небольшие фрагменты, позволяя системе продолжать работу, даже если некоторые компоненты испытывают задержки. Этот подход минимизирует общее время отклика и обеспечивает плавное, предсказуемое управление, особенно в сложных и динамичных условиях, где задержки неизбежны. Благодаря UAC, робот способен адаптироваться к различным скоростям обработки и сетевым условиям, сохраняя при этом стабильную и отзывчивую работу на различных аппаратных платформах.
Протокол универсальной асинхронной разбивки на фрагменты обеспечивает плавное и отзывчивое взаимодействие даже в сложных и динамичных условиях. Благодаря эффективной обработке задержек выполнения, система способна оперативно адаптироваться к изменяющимся обстоятельствам окружающей среды, гарантируя стабильную работу робота. Это достигается за счет разделения задач на небольшие, независимо обрабатываемые фрагменты, что позволяет избежать блокировок и оптимизировать время отклика. В результате, роботизированная система демонстрирует высокую степень надежности и предсказуемости, независимо от сложности окружающей среды и скорости изменения событий.
Интеграция Универсальной Асинхронной Чанковой (UAC) системы в платформу Being-H0.5 обеспечивает возможность бесшовного развертывания на разнообразных роботизированных системах. Это достигается благодаря модульной архитектуре UAC, позволяющей адаптировать протокол к различным аппаратным и программным конфигурациям без значительных изменений в коде. Благодаря этому, разработчики могут легко переносить приложения управления, созданные для Being-H0.5, на другие робототехнические платформы, расширяя их функциональность и область применения. В результате, UAC способствует унификации процесса разработки и упрощает масштабирование роботизированных решений, делая их более доступными и эффективными.
Подтверждение эффективности и определение будущих направлений
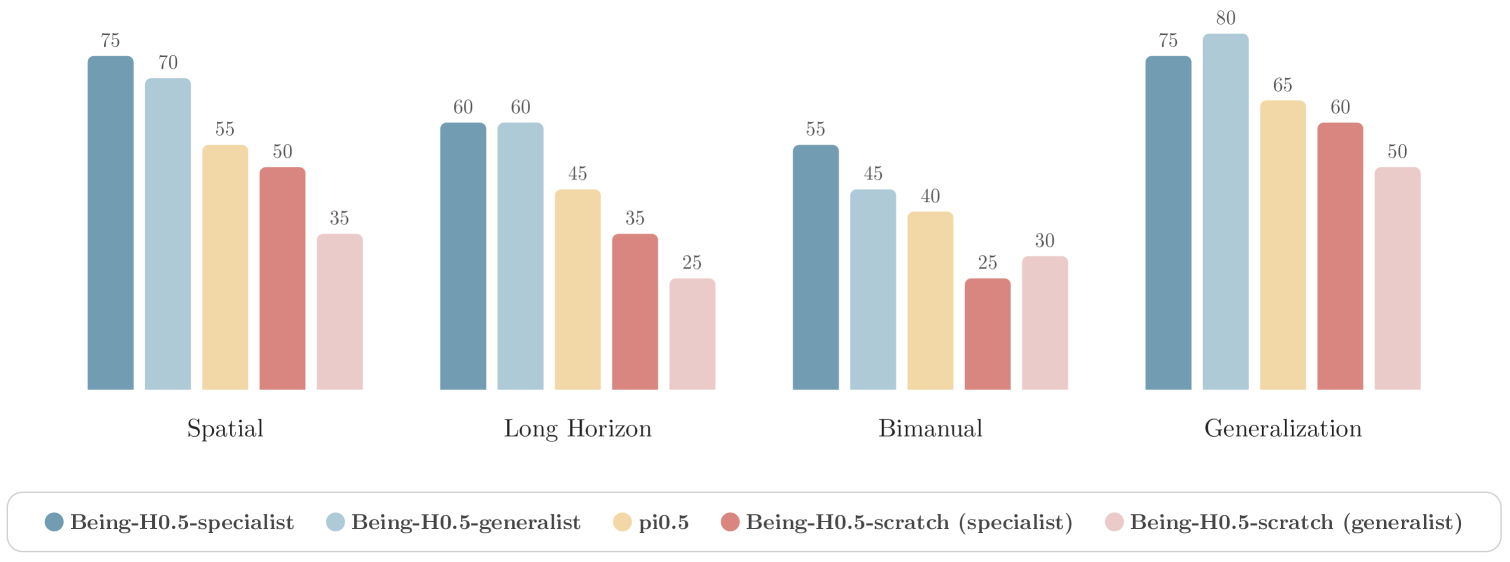
Модель Being-H0.5 продемонстрировала передовые результаты в задачах манипулирования, достигнув 98.9% успешных выполнений на платформе LIBERO и 53.9% на RoboCasa. Эти показатели свидетельствуют о значительном прогрессе в области робототехники и подчеркивают способность модели эффективно обобщать знания, полученные в различных условиях. Высокая точность на LIBERO, в сочетании с заметным успехом в более сложной среде RoboCasa, указывает на потенциал Being-H0.5 для адаптации к новым, ранее не встречавшимся задачам и окружениям, что является ключевым шагом к созданию по-настоящему автономных и универсальных роботов.
Исследования показали заметное повышение эффективности выполнения задач и устойчивости разработанной модели по сравнению с существующими подходами в области робототехники. В ходе экспериментов зафиксировано значительное увеличение процента успешно завершенных операций, что свидетельствует о более надежной работе системы в различных условиях. Особенно ярко это проявляется при решении сложных задач, требующих высокой точности и адаптивности к изменяющейся обстановке. Улучшенная устойчивость позволяет модели эффективно функционировать даже при наличии помех или неточностей в данных, что критически важно для реального применения роботов в динамичных средах. Данные результаты подтверждают перспективность предложенного подхода для создания более надежных и эффективных роботизированных систем.
Исследования показали значительное повышение эффективности предсказания движений при использовании метода маскирования, что подтверждается показателями Mean Wrist Displacement Similarity (MWDS) на реальных видеозаписях человеческой деятельности. Этот подход позволяет модели более точно оценивать и воспроизводить сложные траектории движения запястья, даже при наличии неполной или зашумленной информации. Повышенная точность предсказания движений особенно заметна в ситуациях, требующих от робота адаптации к непредсказуемым действиям человека, что открывает новые возможности для создания более гибких и безопасных систем взаимодействия человек-робот. Улучшение показателей MWDS свидетельствует о способности модели к обобщению и применению полученных знаний в условиях реального мира, приближая робототехнику к созданию действительно автономных и интеллектуальных помощников.
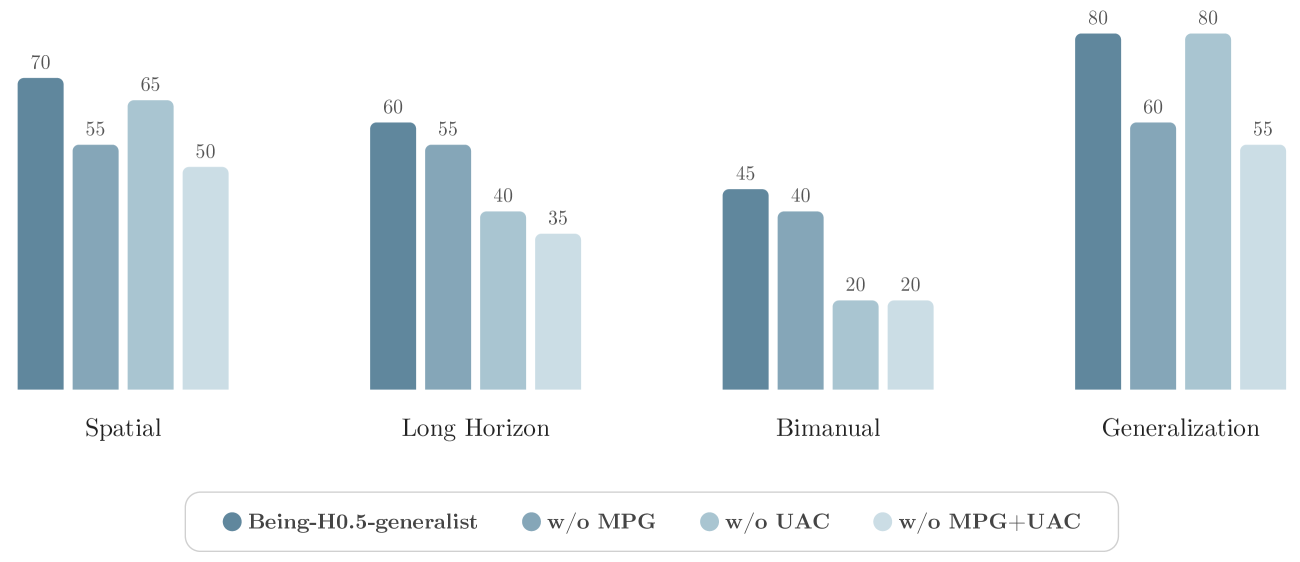
Исследования показали, что исключение механизмов MPG+UAC приводило к заметному снижению эффективности модели, особенно при выполнении задач, требующих планирования на длительный горизонт и координации обеих рук. Данное снижение указывает на критическую роль этих механизмов в обеспечении стабильности и надежности работы системы в реальном времени. Отсутствие MPG+UAC негативно сказывалось на способности робота точно предсказывать и контролировать свои движения, что приводило к ошибкам и неудачам в сложных сценариях. Полученные данные подтверждают, что MPG+UAC являются необходимым компонентом для успешного развертывания робототехнических систем, способных эффективно функционировать в динамичных и непредсказуемых условиях.
Дальнейшие исследования направлены на расширение масштаба модели путем обучения на значительно больших наборах данных, что позволит ей усваивать более широкий спектр навыков и стратегий. Параллельно планируется изучение возможности применения модели к более сложным и реалистичным сценариям взаимодействия с окружающей средой, включая задачи, требующие планирования на длительные горизонты и координации нескольких манипуляторов. Ожидается, что такой подход позволит повысить устойчивость и адаптивность системы в условиях непредсказуемости реального мира, приближая возможность создания роботов, способных эффективно функционировать в разнообразных и динамичных средах.
Предвидится будущее, в котором роботы смогут беспрепятственно адаптироваться к новым условиям и взаимодействовать с людьми естественным и интуитивно понятным образом. Развитие технологий позволяет надеяться на создание систем, способных не просто выполнять заданные программы, но и обучаться, предвидеть потребности и эффективно сотрудничать с человеком в самых разнообразных ситуациях. Такое взаимодействие предполагает не только выполнение физических задач, но и понимание намерений, адаптацию к меняющимся обстоятельствам и возможность совместного решения сложных проблем, что откроет новые перспективы для автоматизации и расширения человеческих возможностей.
Исследование, представленное в данной работе, демонстрирует стремление к созданию систем, способных адаптироваться и функционировать в различных условиях, что созвучно идее неизбежности изменений и необходимости сохранения функциональности во времени. Как заметил Джон фон Нейманн: «В науке нет абсолютной истины, есть лишь приближения». Эта мысль отражает подход, реализованный в модели Being-H0.5, где за счет крупномасштабного обучения и унифицированного пространства действий, система стремится к обобщению опыта и адаптации к новым воплощениям. Ключевым моментом является способность модели к кросс-воплощению, что подчеркивает ее устойчивость к изменениям в аппаратной части и потенциал для долгосрочного использования, несмотря на неизбежный «технический долг» и естественную эволюцию систем.
Куда же дальше?
Представленная работа, демонстрируя способность к обобщению между различными воплощениями роботов, лишь подчеркивает фундаментальную проблему: все системы стареют. Модель Being-H0.5, подобно любому другому искусственному интеллекту, обречена на необходимость постоянного обновления и адаптации к меняющемуся миру. Версионирование, в данном контексте, — это форма памяти, попытка сохранить полезные знания перед лицом неумолимого течения времени.
Несмотря на достигнутый прогресс в области унифицированных пространств действий и крупномасштабного предварительного обучения, остается открытым вопрос о том, как эффективно интегрировать знания, полученные в симуляции, в реальный мир. Стрела времени всегда указывает на необходимость рефакторинга, на постоянную борьбу с несоответствиями между моделью и действительностью. Более того, акцент на «человеко-центричности» неизбежно поднимает этические вопросы: чьи ценности и предпочтения будут заложены в основу поведения этих систем?
Будущие исследования, вероятно, будут сосредоточены на разработке более гибких и самообучающихся архитектур, способных адаптироваться к новым задачам и средам без необходимости постоянного вмешательства человека. Но, возможно, истинный вызов заключается не в создании идеальной модели, а в принятии ее неизбежной неполноты и несовершенства.
Оригинал статьи: https://arxiv.org/pdf/2601.12993.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Белки-хамелеоны: Пределы предсказания гибкости структуры
- Сердце музыки: открытые модели для создания композиций
- Энергоэффективность сотовой сети: обучение с подкреплением и управление режимами сна
- Растительность под прицетом ИИ: Оценка биофизических параметров по снимкам Sentinel-2
- Мир моделей: смогут ли роботы ориентироваться без карт?
- Искусственный интеллект: курс для жизни и общества
- Искусственный судья: Как обучить модель понимать изображения и текст без участия человека
- Вариационные и полувариационные неравенства: от теории к практике
- Данные в движении: Автоматизация подготовки данных с помощью искусственного интеллекта
- Геопространственный разум: Новое поколение ИИ-агентов
2026-01-21 19:22