Автор: Денис Аветисян
Новый подход позволяет создавать точные 3D-карты линий, используя совместную оптимизацию плоскостей и линейных сегментов для повышения точности и полноты пространственного понимания.
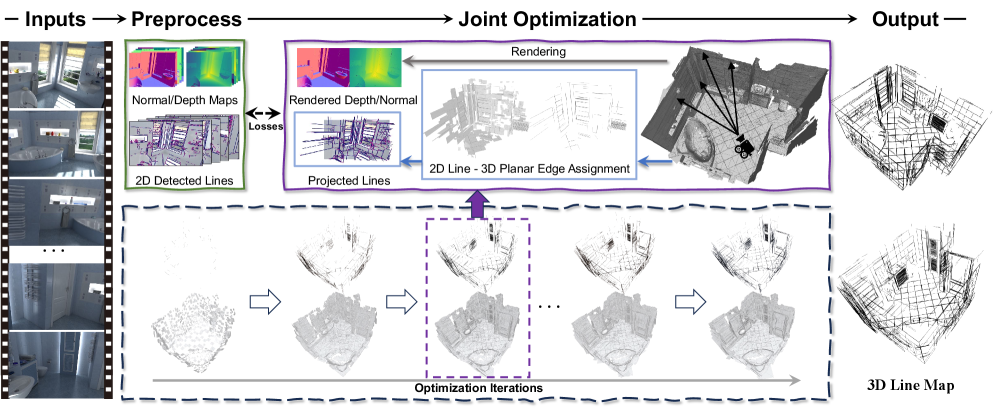
Представлен LiP-Map — фреймворк для 3D-реконструкции, использующий взаимодействие плоскостей и линий с помощью совместной оптимизации.
Воссоздание трехмерной структуры сцен по многовидовым изображениям часто сталкивается с трудностями в компактном и структурированном представлении линейных элементов. В работе ‘Interacted Planes Reveal 3D Line Mapping’ представлена новая схема, LiP-Map, которая решает эту проблему путем совместной оптимизации плоскостных поверхностей и трехмерных линий, рассматривая линии как границы конечных плоскостей. Такой подход позволяет добиться высокой точности и детализации в построении трехмерных карт линий, значительно превосходя существующие методы на различных наборах данных, включая ScanNetV2 и Hypersim. Не откроет ли это новые возможности для повышения эффективности визуальной локализации и более глубокого понимания пространственной организации искусственных сред?
Трудности Воссоздания Реального Мира
Традиционные методы трехмерной реконструкции сцен зачастую опираются на представление поверхностей посредством плоских примитивов, что создает значительные трудности при работе со сложными, непланарными структурами. Этот подход, хотя и вычислительно эффективен для простых объектов, приводит к существенным искажениям и потере деталей при воссоздании реальных окружений. Например, изогнутые стены, скульптурные элементы или органические формы объектов оказываются упрощены до плоских плоскостей, что снижает точность и реалистичность полученной модели. В результате, подобное представление ограничивает возможности применения в таких областях, как робототехника, где требуется точное восприятие окружающей среды, и в сферах дополненной и виртуальной реальности, где реализм является ключевым фактором погружения пользователя.
Упрощение, вносимое при представлении трехмерных сцен с помощью плоских примитивов, неизбежно приводит к неточностям, существенно ограничивающим возможности достоверного воссоздания реального мира. Данное ограничение оказывает негативное влияние на широкий спектр приложений, в частности, на робототехнику, где точное восприятие окружающей среды критически важно для навигации и манипулирования объектами. Аналогичные проблемы возникают и в сферах дополненной и виртуальной реальности, где искажения геометрии могут нарушить эффект погружения и снизить реалистичность взаимодействия. Таким образом, стремление к более детальному и правдоподобному моделированию окружения требует отказа от упрощенных представлений в пользу методов, способных учитывать произвольную геометрию объектов и сложные пространственные конфигурации.
Для достижения точной и полной реконструкции окружающей среды необходимо отказаться от упрощающих предположений о преобладании плоских поверхностей и перейти к методам, способным отображать произвольную геометрию. Традиционные подходы, основанные на аппроксимации объектов плоскими примитивами, часто оказываются недостаточными для адекватного представления сложных, неровных структур, характерных для реального мира. Новые алгоритмы, использующие, например, неявные поверхности или воксельную геометрию, позволяют моделировать криволинейные и сложные формы с высокой точностью, открывая возможности для более реалистичных виртуальных сред и надежной работы робототехнических систем в неструктурированном окружении. Такой переход требует разработки новых методов обработки данных и алгоритмов, способных эффективно представлять и манипулировать сложными геометрическими моделями.

Линейная Геометрия: Основа Точной Реконструкции
Трехмерное отображение линий (3D Line Mapping) представляет собой альтернативный подход к реконструкции геометрии, который непосредственно восстанавливает трехмерные линейные сегменты, в отличие от традиционных методов, аппроксимирующих окружение плоскостями. Вместо представления сцены набором плоскостей, данный метод идентифицирует и восстанавливает линии как фундаментальные геометрические примитивы. Это позволяет более точно описывать окружение, особенно в случаях, когда преобладают объекты с выраженными ребрами и непланарными поверхностями, поскольку прямые линии являются базовыми элементами для определения формы и структуры таких объектов. Использование линий в качестве основы для реконструкции снижает вычислительную сложность и повышает точность представления геометрии по сравнению с аппроксимацией плоскостями, особенно в сложных сценах.
Методы, такие как LiP-Map и LiMAP, расширяют концепцию 3D-картирования линий, используя обнаружение линий на 2D-изображениях в качестве начальной точки для надежной 3D-реконструкции. Эти алгоритмы идентифицируют линии на отдельных кадрах или изображениях и затем используют геометрические ограничения и методы триангуляции для определения их 3D-положения и ориентации. LiP-Map, в частности, использует предположение о линейности для эффективного сопоставления и отслеживания линий между кадрами, в то время как LiMAP оптимизирует 3D-положения линий, минимизируя ошибку перепроецирования и обеспечивая согласованность реконструкции. Такой подход позволяет создавать более точные 3D-модели объектов и сред, особенно в случаях, когда поверхности не являются плоскими или имеют сложную геометрию.
Подход, основанный на построении 3D-линий, обеспечивает более точное представление геометрии, особенно в средах с большим количеством ребер и непланарных поверхностей. В отличие от методов, использующих аппроксимацию плоскостями, данная методология напрямую реконструирует 3D-линейные сегменты. Это позволяет избежать ошибок, возникающих при попытке описать сложные формы с помощью простых плоскостей, что критически важно для объектов с выраженной линейной структурой и неровными поверхностями. Повышенная точность достигается за счет непосредственного использования информации о ребрах и линейных элементах сцены, что снижает влияние шума и неточностей, характерных для методов, основанных на аппроксимации.
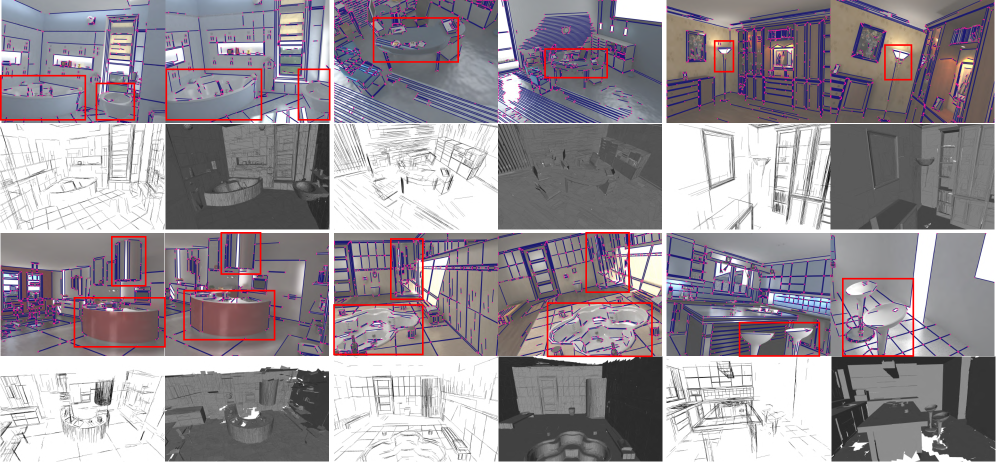
![Сравнение карт 3D-линий, полученных различными методами на трех публичных наборах данных, показывает, что предложенный подход позволяет эффективно восстанавливать 3D-линии из 2D-сегментов, обнаруженных DeepLSD[11], используя глубинные карты, полученные как из GT-мешей, так и из PlanarSplatting[8], превосходя методы, основанные на прямой проекции 2D-линий в 3D.](https://arxiv.org/html/2602.01296v1/x1.png)
Оптимизация Реконструкции: Детали и Точность
LiP-Map использует оптимизационный фреймворк, в котором для эффективного поиска ближайших соседей применяются методы пересечения лучей с плоскостями и структуры данных KD-Tree. Пересечение лучей с плоскостями позволяет точно определить точки на поверхностях, а KD-Tree обеспечивает логарифмическую сложность поиска ближайших точек в пространстве, значительно ускоряя процесс реконструкции. Эта комбинация алгоритмов позволяет LiP-Map эффективно обрабатывать большие объемы данных и создавать детализированные 3D-модели с высокой точностью.
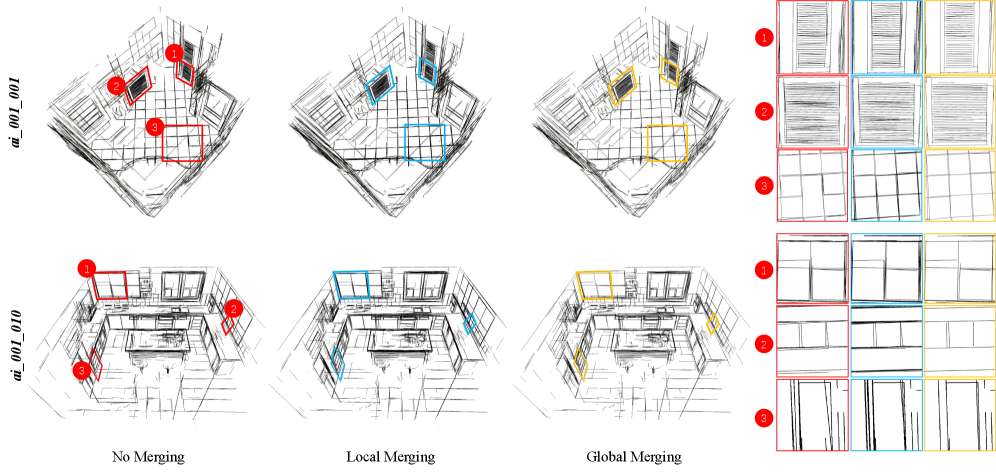
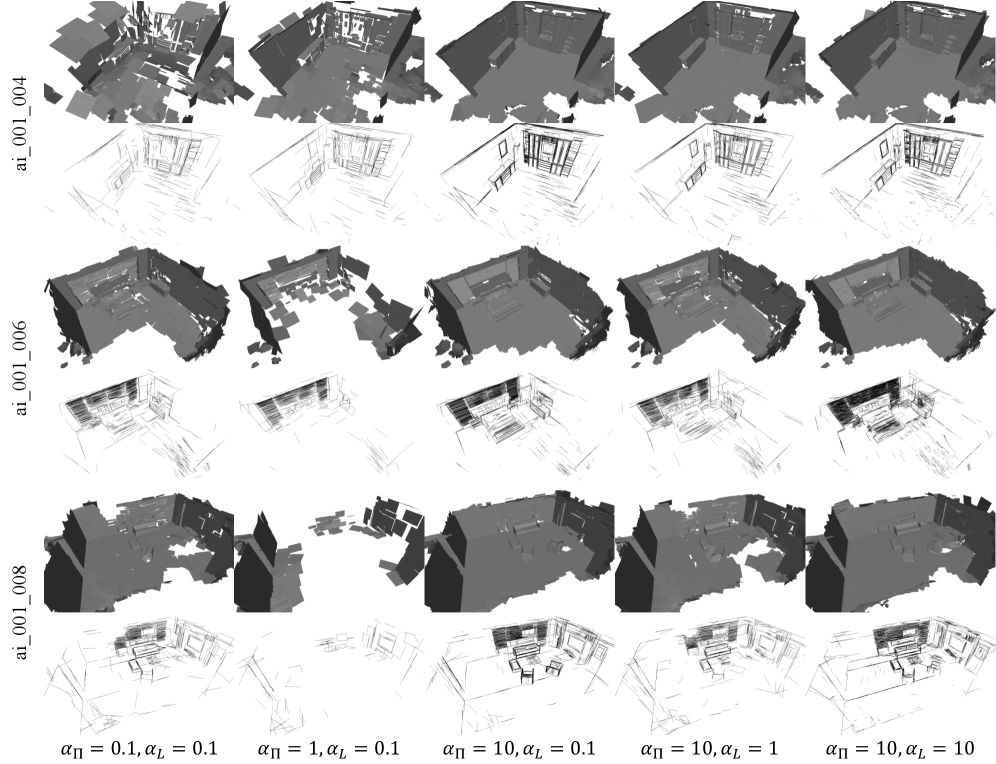
Алгоритм LiP-Map использует совместную оптимизацию параметров плоских поверхностей и трехмерных линий для минимизации ошибок реконструкции. Этот подход позволяет одновременно уточнять геометрию как плоских элементов сцены, так и линейных структур, что приводит к более точной и полной модели. Совместная оптимизация, в отличие от последовательной, обеспечивает согласованность между плоскими и линейными элементами, уменьшая искажения и пропуски в результирующей трехмерной модели. Улучшение полноты модели достигается за счет более эффективного определения границ плоских поверхностей и точного восстановления линейных элементов, что особенно важно для сцен со сложной геометрией.
Методы, такие как VGGT и Metric3D, вносят значительный вклад в процесс реконструкции сцен за счет точного предсказания карт глубины и карт нормалей. Карты глубины, представляющие собой информацию о расстоянии от камеры до каждой точки в сцене, служат основой для создания трехмерной геометрии. Карты нормалей, определяющие ориентацию поверхности в каждой точке, необходимы для реалистичной визуализации и точного расчета освещения. Комбинированное использование карт глубины и нормалей позволяет алгоритмам реконструкции эффективно воссоздавать детализированные и текстурированные модели, обеспечивая высокое качество и полноту представления сцены.
Оценка Результатов: Точность и Полнота Реконструкции
В конечном счете, успех в реконструкции трехмерных сцен определяется достижением высокой точности и полноты — насколько точно восстановленная модель соответствует реальному объекту и какая часть сцены была захвачена. Точность отражает, насколько верно определены геометрические детали и текстуры, в то время как полнота указывает на процент сцены, который был успешно воссоздан. Оба эти параметра критически важны для создания реалистичных и полезных трехмерных моделей, применимых в различных областях, таких как робототехника, виртуальная реальность и компьютерное зрение. Поэтому, оценка этих показателей является ключевым этапом в разработке и совершенствовании алгоритмов трехмерной реконструкции.
Результаты исследований демонстрируют, что LiP-Map достигает передового уровня производительности в задаче реконструкции 3D-сцен. Это подтверждается более низкими показателями Variation of Information (VOI) — метрики, оценивающей расхождение между реконструированной и реальной сценой — и, одновременно, более высокими значениями Rand Index (RI) и Segmentation Covering (SC). RI и SC позволяют оценить степень соответствия между сегментацией, полученной алгоритмом, и фактической сегментацией сцены, что свидетельствует о большей точности и полноте реконструкции, обеспечиваемой LiP-Map по сравнению с PlanarSplatting. Таким образом, LiP-Map предоставляет более детальное и достоверное представление о трехмерном окружении.
Результаты исследований подтверждают, что LiP-Map обеспечивает более точное и полное воссоздание трехмерных сцен. Оцениваемые метрики, такие как Variation of Information (VOI), Rand Index (RI) и Segmentation Covering (SC), демонстрируют превосходство LiP-Map над существующими методами, в частности, над PlanarSplatting. Более низкие значения VOI указывают на меньшую неопределенность в реконструированной геометрии, а более высокие значения RI и SC свидетельствуют о более полном захвате и точном представлении объектов в сцене. Таким образом, LiP-Map не только воспроизводит существующую структуру с большей верностью, но и более эффективно улавливает детали, обеспечивая целостную и достоверную трехмерную модель окружающего пространства.
Взгляд в Будущее: Преодолевая Ограничения и Расширяя Возможности
В будущем исследования, вероятно, будут направлены на расширение возможностей существующих методов для работы со всё более сложными сценами и динамическими окружениями. Это потребует разработки алгоритмов, способных эффективно обрабатывать значительно больший объем данных, учитывать изменения в реальном времени и адаптироваться к непредсказуемым условиям. Особое внимание будет уделено повышению устойчивости к шумам и помехам, а также разработке методов для точного воссоздания деталей даже в условиях недостаточной освещенности или частичной видимости. Успешная реализация этих направлений откроет возможности для создания более реалистичных и интерактивных виртуальных сред, а также для решения сложных задач в области робототехники и автономной навигации.
Сочетание разработанных методов реконструкции трехмерных сцен с передовыми инструментами рендеринга и моделирования открывает принципиально новые возможности для приложений дополненной и виртуальной реальности. Данная интеграция позволит создавать фотореалистичные виртуальные окружения, взаимодействующие с реальным миром в режиме реального времени. Представьте себе, например, возможность детального виртуального восстановления исторических артефактов, которые можно исследовать в контексте их первоначальной среды, или создание интерактивных тренажеров, неотличимых от реальности. Более того, подобная синергия технологий способна значительно улучшить пользовательский опыт в играх, архитектурном дизайне и других сферах, где важна высокая степень погружения и реалистичности визуализации.
Точная и эффективная реконструкция трехмерных сцен является ключевым фактором для развития широкого спектра приложений. В робототехнике и автономной навигации это позволяет создавать детальные карты окружающей среды, необходимые для безопасного и эффективного перемещения. В области сохранения культурного наследия, трехмерная реконструкция позволяет создавать цифровые двойники исторических объектов и памятников, обеспечивая их долгосрочное сохранение и виртуальное посещение. Кроме того, данная технология находит применение в индустрии развлечений, позволяя создавать реалистичные виртуальные миры и улучшать качество графики в играх и фильмах. Развитие методов трехмерной реконструкции открывает новые возможности для визуализации данных, проектирования и моделирования, а также для создания интерактивных и иммерсивных пользовательских интерфейсов.
В этой работе описывается LiP-Map, подход, который совмещает оптимизацию плоскостей и линий для создания точных 3D-карт. Идея взаимодействия примитивов, плоскостей и линий, выглядит элегантно, но, как показывает опыт, любое «совместное» решение быстро обрастает краевыми случаями. Как говорил Эндрю Ын: «Самый большой барьер для успеха — это страх неудачи.». Похоже, что исследователи не боятся добавлять новые параметры в оптимизацию, даже если это увеличивает риск нестабильности. В конечном итоге, всегда находится способ сломать даже самую изящную теорию, особенно когда дело касается продакшена. Иногда, кажется, что мы не создаём 3D-карты, а просто продлеваем страдания алгоритмов.
Что дальше?
Представленный подход, безусловно, демонстрирует улучшение в задаче построения трехмерных карт линий. Однако, стоит помнить: каждая элегантная оптимизация — это лишь отсрочка неизбежного столкновения с реальными данными. Неизбежно возникнет необходимость в масштабировании — и тогда выяснится, что «совместная оптимизация» — это дорогостоящий способ борьбы с шумом в больших наборах данных. Вопрос не в том, насколько точно можно реконструировать линии в идеальных условиях, а в том, как быстро система начнёт выдавать артефакты, когда столкнётся с неполными данными, отражающими поверхностями и сложной геометрией.
Вероятно, ближайшее будущее исследований связано не с усложнением алгоритмов, а с более прагматичным подходом к обработке данных. Попытки «понять» сцену на основе неполных данных обречены на провал. Гораздо перспективнее сосредоточиться на создании систем, которые умеют устойчиво работать с неточностями, и, возможно, просто игнорировать те элементы, которые невозможно достоверно реконструировать. Если код выглядит идеально — значит, его никто не деплоил в реальный мир.
Очевидно, что «пространственный интеллект» — это привлекательный термин, но за ним скрывается банальная задача — преобразование пикселей в пригодные для использования данные. И пока эта задача не будет решена с достаточной надёжностью, разговоры о «понимании» сцены останутся лишь красивыми словами. Каждая «революционная» технология завтра станет техдолгом.
Оригинал статьи: https://arxiv.org/pdf/2602.01296.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Искусственный интеллект, который учится играть: новая платформа для стабильного обучения агентов
- Вероятностный компьютер на фотонных чипах: новая эра вычислений
- Моделирование биомолекул: новый импульс от нейросетей
- Сплетение света и времени: аттосекундная спектроскопия на квантовых парах
- Искусственный интеллект: хрупкость визуального мышления
- Ruyi2: Семейство языковых моделей для эффективного обучения и развертывания
- Бреп-Кодер: Искусственный интеллект, понимающий геометрию
- Квантовые Загадки и Финансовые Реалии
- Поймать Мгновение: Эволюция Детекторов Времени
- Память для разума: Архитектура коллективного интеллекта
2026-02-03 22:42