Автор: Денис Аветисян
Исследователи представили систему PhyNiKCE, которая объединяет возможности нейросетей и символьных вычислений для повышения точности и надежности автоматизированных симуляций потоков жидкости и газа.
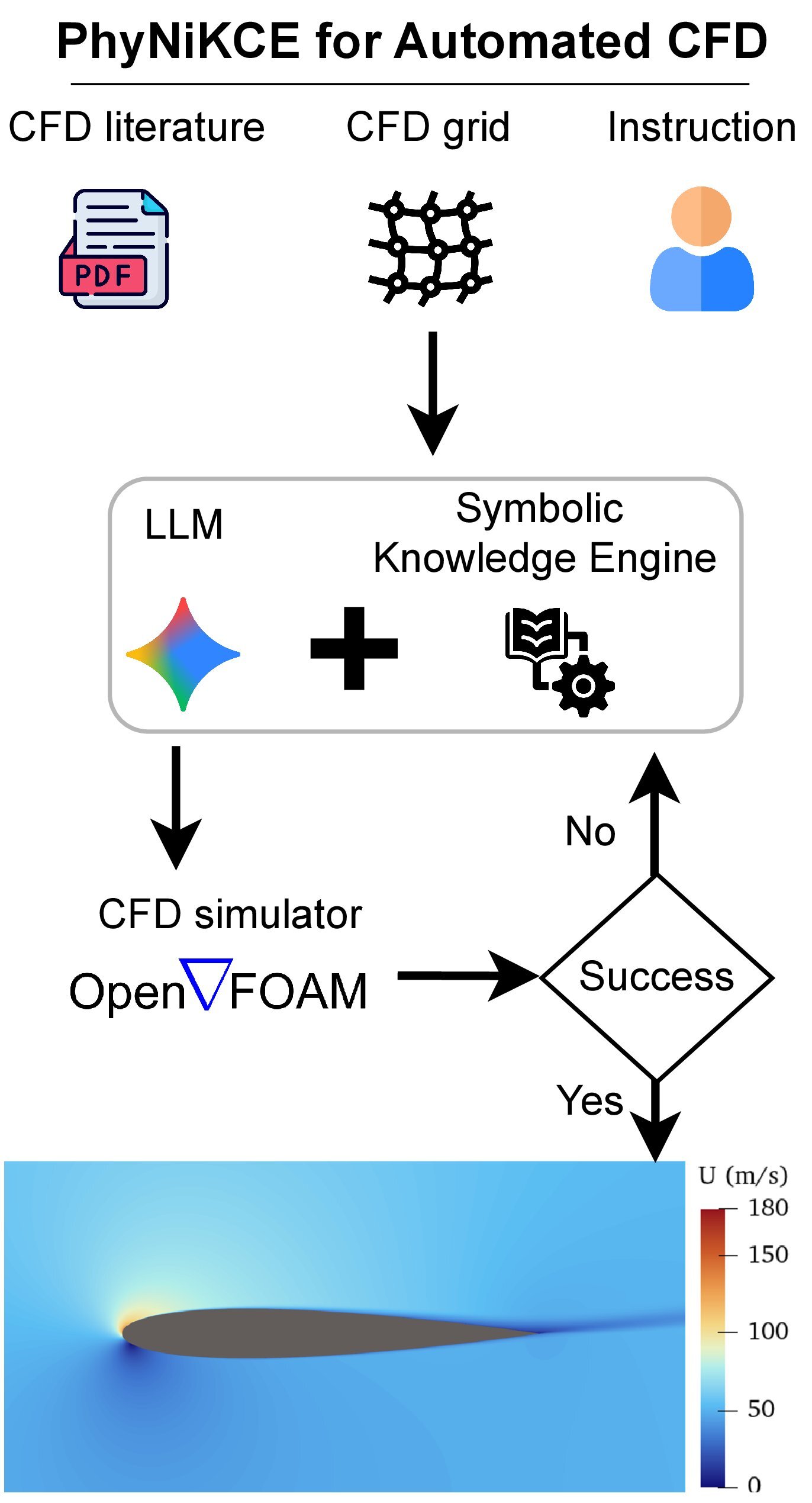
PhyNiKCE — это нейросимволическая агентурная система, обеспечивающая физическую согласованность и автономность в задачах вычислительной гидродинамики.
Несмотря на стремительное развитие больших языковых моделей (LLM), их применение в задачах, требующих строгого соблюдения физических законов, таких как вычислительная гидродинамика (CFD), сталкивается с серьезными ограничениями. В данной работе представлена система ‘PhyNiKCE: A Neurosymbolic Agentic Framework for Autonomous Computational Fluid Dynamics’ — нейросимволическая платформа, сочетающая возможности LLM с детерминированной проверкой соответствия физическим ограничениям. Благодаря разделению этапов планирования и валидации, PhyNiKCE демонстрирует значительное повышение точности и эффективности автономных CFD-симуляций, решая проблему семантико-физического несоответствия. Может ли подобный подход стать основой для создания надежных и масштабируемых систем искусственного интеллекта в различных областях промышленной автоматизации?
Вызов достоверного моделирования в LLM-управляемой ГД
Большие языковые модели (БЯМ) демонстрируют значительный потенциал в автоматизации вычислительной гидродинамики (ГД), однако сохранение физической корректности в сложных сценариях представляет собой серьезную проблему. Хотя БЯМ способны генерировать правдоподобные решения, они часто испытывают трудности с обеспечением соответствия результатов фундаментальным законам физики, особенно при моделировании турбулентных потоков или нестационарных процессов. Это связано с тем, что БЯМ обучаются на больших объемах текстовых данных, где акцент делается на синтаксической и семантической связности, а не на физической правдоподобности. В результате, модели могут генерировать решения, которые кажутся логичными с лингвистической точки зрения, но физически нереалистичны, что ограничивает их применение в критически важных инженерных задачах и требует разработки специальных методов контроля и верификации.
Несмотря на то, что методы расширенной генерации на основе поиска (RAG) эффективно снижают вероятность галлюцинаций в больших языковых моделях, применяемых для вычислительной гидродинамики, их производительность достигает плато из-за неспособности адекватно учитывать тонкие физические ограничения. Существующие RAG-системы, как правило, полагаются на поиск релевантных данных из предопределенной базы знаний, однако зачастую упускают из виду сложные взаимосвязи и неявные правила, определяющие физически корректное моделирование. Это приводит к тому, что, хотя LLM может генерировать правдоподобные ответы, полученные результаты могут не соответствовать фундаментальным законам физики, особенно в сложных сценариях, требующих учета множества взаимодействующих факторов. Таким образом, для достижения действительно надежных и точных симуляций необходимо разрабатывать более продвинутые подходы, способные не просто извлекать информацию, но и интегрировать ее с глубоким пониманием физических принципов.
Существенная проблема в применении больших языковых моделей (LLM) к вычислительной гидродинамике (CFD) заключается в разрыве между семантическим пониманием задачи и физической корректностью получаемого решения. Модель способна интерпретировать текстовое описание условий, например, геометрию потока или свойства жидкости, но не всегда гарантирует, что сгенерированный сценарий симуляции соответствует фундаментальным законам физики. Этот “семантико-физический разрыв” приводит к тому, что LLM может предложить правдоподобное, но нереалистичное решение, игнорируя, например, законы сохранения массы или энергии. В результате, несмотря на способность понимать что необходимо смоделировать, модель испытывает трудности с обеспечением того, чтобы симуляция была физически обоснованной и достоверной, что критически важно для получения надежных результатов в инженерных расчетах.
PhyNiKCE: Разделение планирования и валидации
PhyNiKCE решает проблему несоответствия между семантическим пониманием и физической реализацией, разделяя нейронное планирование и символическую валидацию. Этот подход создает нейросимволическую архитектуру, в которой планировщик, основанный на больших языковых моделях (LLM), генерирует планы действий, а затем отдельный символический модуль проверяет их на соответствие законам физики и ограничениям симуляции. Такое разделение позволяет использовать сильные стороны обоих подходов: гибкость и способность к обобщению LLM для формирования планов и точность символической логики для обеспечения их физической реализуемости. В результате формируется агент, способный к автономному планированию и действию в сложных, физически реалистичных средах.
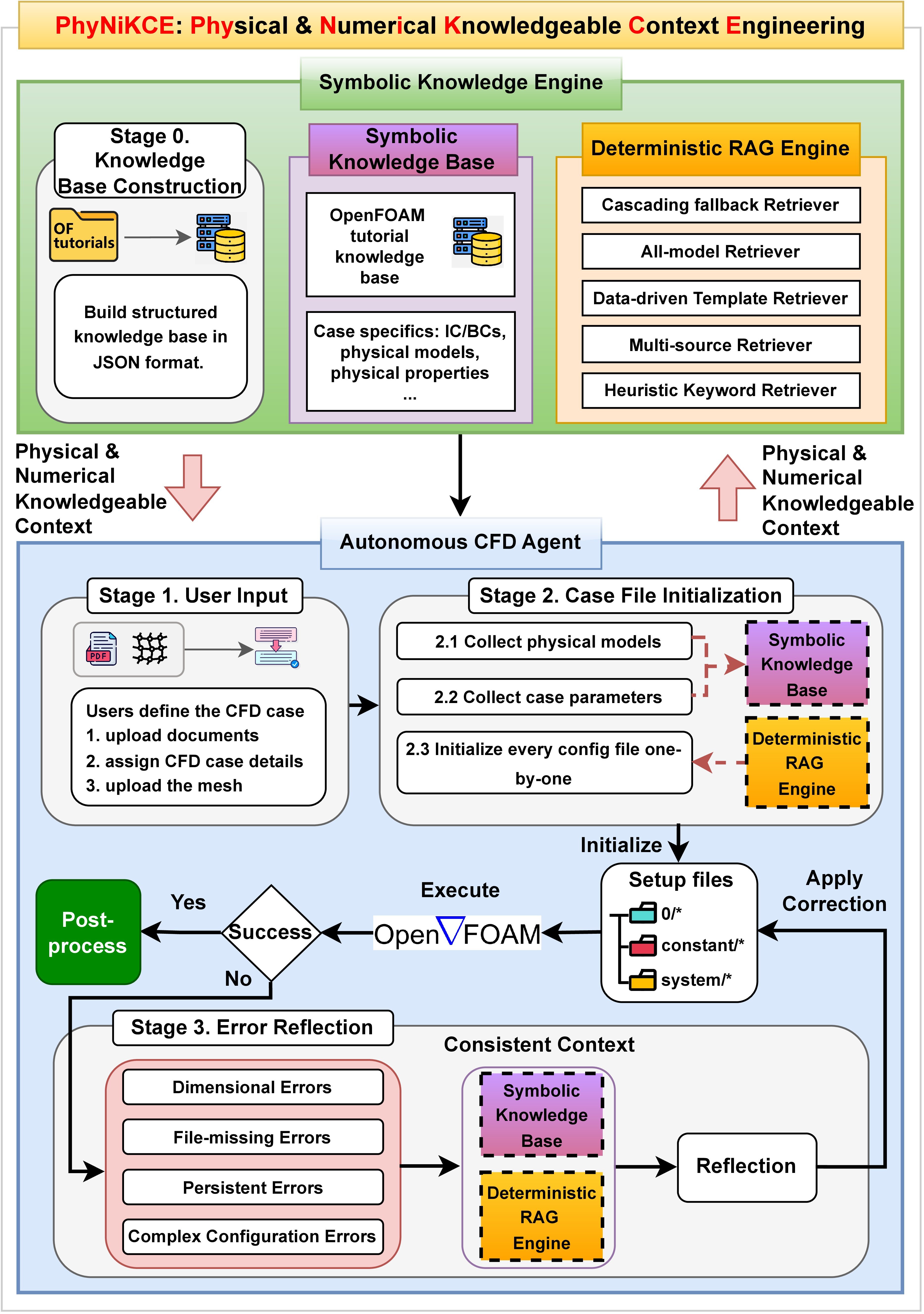
В основе архитектуры PhyNiKCE лежит Символьный Двигатель Знаний (Symbolic Knowledge Engine), выполняющий функцию детерминированного ограничителя между нейронным планировщиком (LLM) и решателем симуляции. Этот двигатель выступает в качестве посредника, проверяя сгенерированные LLM планы на соответствие физическим законам и ограничениям среды симуляции, прежде чем они будут переданы на исполнение. Фактически, он обеспечивает формальную верификацию планов, предотвращая отправку в симуляцию некорректных или невыполнимых конфигураций, что повышает надежность и эффективность всей системы.
Движок символьных знаний использует формализм задачи удовлетворения ограничениям (CSP) для обеспечения соответствия генерируемых конфигураций законам физики и ограничениям симуляции. В рамках CSP, переменные представляют собой параметры конфигурации, а ограничения кодируют физические законы (например, законы сохранения энергии и импульса) и ограничения симуляционной среды (например, границы пространства, допустимые углы наклона). Решение задачи CSP позволяет определить допустимые конфигурации, которые удовлетворяют всем заданным ограничениям, тем самым гарантируя физическую реализуемость и корректность планируемых действий в симуляции. \text{CSP: } \langle X, D, C \rangle , где X — переменные, D — домены значений, C — ограничения.
Детерминированный RAG для валидной конфигурации извлечения
В основе PhyNiKCE лежит специализированный детерминированный механизм RAG (Retrieval-Augmented Generation), отличающийся от стандартных векторных систем поиска и извлечения информации. Традиционные векторные RAG подвержены проблеме «отравления контекста» (context poisoning), когда нерелевантные или вредоносные данные попадают в контекст, влияя на качество генерации. PhyNiKCE использует структурированные стратегии извлечения, обеспечивая предсказуемый и контролируемый процесс поиска, что позволяет минимизировать риски, связанные с использованием невалидных данных и повысить надежность результатов.
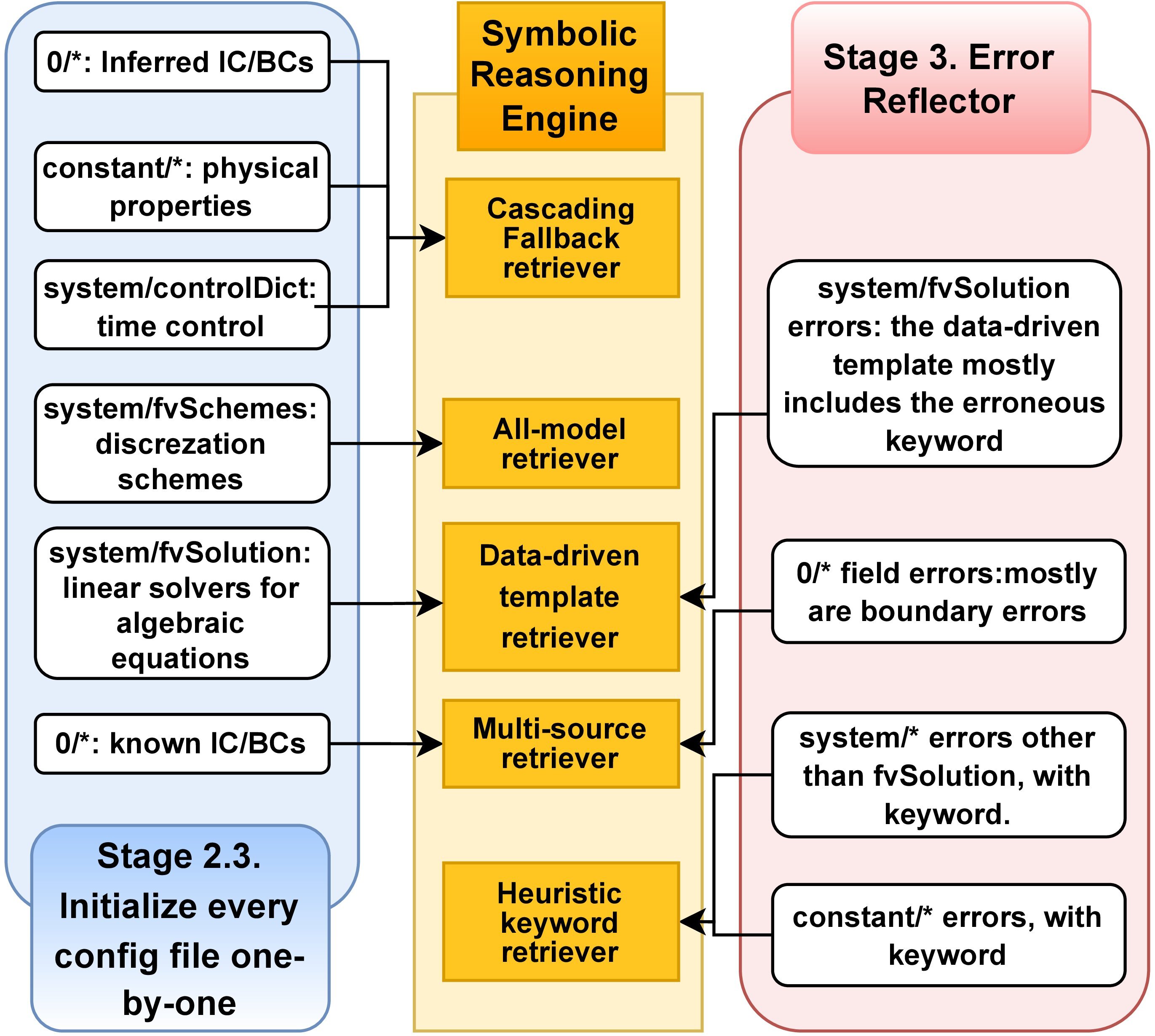
В основе Deterministic RAG движка PhyNiKCE лежат специализированные извлекатели (Specialized Retrievers), такие как Cascading Fallback и Multi-Source. Каждый из этих извлекателей спроектирован для выполнения конкретной задачи по поиску информации и, что критически важно, для обеспечения соблюдения физических ограничений. Cascading Fallback последовательно использует несколько источников данных, переходя к следующему в случае недоступности или нерелевантности предыдущего. Multi-Source извлекатель, в свою очередь, объединяет данные из нескольких источников параллельно, что позволяет повысить надежность и полноту извлеченной информации. Оба подхода позволяют контролировать процесс извлечения данных и гарантировать, что извлекаемая конфигурация соответствует заданным физическим ограничениям, минимизируя риск получения невалидных результатов.
В PhyNiKCE риск генерации недействительных конфигураций минимизируется за счет строгого контроля процесса извлечения релевантной информации. Вместо вероятностного подхода, используемого в стандартных системах RAG, PhyNiKCE применяет детерминированные стратегии, гарантирующие соответствие извлеченных данных заданным физическим ограничениям и требованиям к конфигурации. Это обеспечивает получение только валидных параметров и данных, необходимых для моделирования, что напрямую влияет на надежность и точность получаемых результатов симуляции. Контролируемый процесс извлечения снижает вероятность «загрязнения» контекста недостоверной или нерелевантной информацией, что критически важно для корректного функционирования симуляционных моделей.
Повышенная эффективность и надежность благодаря нейросимволической интеграции
Разработанная система PhyNiKCE демонстрирует значительное превосходство в производительности по сравнению с предыдущими агентами, такими как ChatCFD. В отличие от ChatCFD, страдающего от жесткости шаблонов и ограниченной способности к адаптации, PhyNiKCE обладает большей гибкостью и устойчивостью при решении сложных задач. Это достигается за счет новой архитектуры, позволяющей агенту более эффективно адаптироваться к изменяющимся условиям и находить более надежные решения. В результате, PhyNiKCE способен успешно справляться с более широким спектром задач и обеспечивать более стабильные и точные результаты, преодолевая ограничения, присущие предыдущим поколениям подобных систем.
В рамках разработанной системы, ключевым нововведением стала автономная рефлексия ошибок, позволяющая агенту самостоятельно выявлять и устранять ошибки, возникающие в процессе симуляции. Данный механизм значительно повышает стабильность работы системы и позволяет ей более эффективно справляться с непредсказуемыми ситуациями. В результате внедрения автономной рефлексии ошибок, количество итераций, необходимых для исправления ошибок, сократилось на 59% по сравнению с базовыми показателями. Это свидетельствует о значительном улучшении способности системы к самокоррекции и адаптации, что особенно важно для сложных вычислительных задач, требующих высокой точности и надежности.
Внедрение символьной верификации значительно повышает прозрачность процесса принятия решений, что способствует укреплению доверия к результатам моделирования. Система PhyNiKCE демонстрирует впечатляющий прогресс в точности автономных CFD-симуляций, увеличив её с 26% до 51% — относительное улучшение составило 96%. Помимо повышения надёжности, разработанный подход позволяет оптимизировать использование ресурсов: благодаря инициализации на основе знаний, потребление LLM-токенов сократилось на 17%, что делает систему более эффективной и экономичной в применении.
Представленная работа демонстрирует стремление к созданию целостной системы, где планирование и верификация неразрывно связаны. Разделение нейронного планирования и детерминированной валидации в PhyNiKCE подчеркивает важность понимания всей структуры системы для обеспечения её корректной работы. Как однажды заметил Давид Гильберт: «Всякий раз, когда что-то ломается, это происходит на границе ответственности». PhyNiKCE, отделяя этапы планирования и валидации, стремится чётко определить эти границы и избежать ошибок, возникающих из-за разрыва между семантическим пониманием и физической согласованностью. Такой подход позволяет создать более надежные и предсказуемые системы, способные к автономному проведению сложных вычислений в области гидродинамики.
Куда Дальше?
Представленная работа, хоть и демонстрирует значительный шаг вперёд в области автономной вычислительной гидродинамики, лишь подчёркивает фундаментальную сложность задачи. Разделение нейронного планирования и детерминированной верификации, безусловно, является элегантным решением проблемы семантико-физического несоответствия, однако каждая оптимизация неизбежно порождает новые узлы напряжения в системе. Вместо поиска идеального «чёрного ящика» необходимо признать, что истинное понимание физических процессов требует прозрачности и возможности интерпретации действий агента.
Будущие исследования должны сосредоточиться не только на повышении точности симуляций, но и на разработке методов оценки и минимизации неопределённости. Важно понимать, когда агент уверен в своём решении, а когда ему требуется дополнительная информация или пересмотр стратегии. Иными словами, необходимо создать систему, способную не просто решать задачи, но и осознавать границы своей компетентности.
В конечном счёте, архитектура системы определяет её поведение во времени. PhyNiKCE — это не конечная точка, а скорее отправная. Дальнейшее развитие потребует интеграции с другими областями искусственного интеллекта, такими как обучение с подкреплением и причинно-следственный вывод, для создания действительно автономных и надёжных систем моделирования.
Оригинал статьи: https://arxiv.org/pdf/2602.11666.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Сила в Модели: Ограничения Оптимизации в Математических Задачах
- Искусственный интеллект и закон: гармония неизбежна
- QR-разложение для экстремальных матриц: новый взгляд на GPU
- Молекулярный интеллект: проверка химического мышления
- Видеосинтез без тормозов: новый подход к генерации видео в реальном времени
- Спектральная оптимизация: новый подход к созданию квантовых состояний
- От мгновений к движению: Новая эра предсказания структуры белков
- Звук как помощник зрения: Новые горизонты генерации видео
- Искусственный интеллект под защитой: Новая эра приватности в коллаборации агентов
- Социальные сети: Искусство правдоподобных взаимодействий
2026-02-14 11:09