Автор: Денис Аветисян
Новый подход к моделированию динамики квадрокоптеров обеспечивает высокую точность и скорость вычислений, открывая возможности для разработки более эффективных систем управления и реалистичных симуляций.
Представлен фреймворк на основе гауссовских процессов с градиентной оптимизацией и аппроксимацией комплемента Шура для точного и быстрого предсказания динамики квадрокоптеров.
Несмотря на широкое применение гауссовских процессов для моделирования динамики квадрокоптеров, вычислительная сложность ограничивает их использование в реальном времени. В данной работе, посвященной ‘Gradient-Enhanced Partitioned Gaussian Processes for Real-Time Quadrotor Dynamics Modeling’, предлагается новый подход, сочетающий в себе разбиение данных, аппроксимацию с использованием дополнительных градиентных данных и применение Schur-дополнений для ускорения вычислений. Это позволяет достичь высокой точности предсказания динамики квадрокоптера, включая аэродинамические эффекты, при частоте более 30 Гц на стандартном настольном оборудовании. Способны ли подобные методы стать основой для разработки надежных и эффективных систем управления в сложных и изменчивых условиях?
Точность и Скорость: Ключ к Реалистичной Симуляции Квадрокоптеров
Точное моделирование динамики квадрокоптеров является основополагающим для развития передовых систем управления и автономной навигации. От способности достоверно воспроизвести все факторы, влияющие на полет — от аэродинамических сил и моментов до воздействия внешних возмущений — напрямую зависит эффективность алгоритмов стабилизации, точность выполнения траекторий и надежность работы в реальных условиях. Именно поэтому, разработка реалистичных симуляторов, способных учитывать даже незначительные отклонения от идеальной модели, представляет собой ключевую задачу для исследователей и разработчиков беспилотных летательных аппаратов, стремящихся к созданию интеллектуальных и адаптивных систем, способных решать сложные задачи в автоматическом режиме.
Традиционные методы моделирования аэродинамики квадрокоптеров часто сталкиваются с компромиссом между скоростью вычислений и точностью. Стремление к высокой детализации, необходимой для реалистичного воспроизведения сложных воздушных потоков и турбулентности, как правило, приводит к значительному увеличению вычислительной нагрузки. В результате, симуляции либо выполняются слишком медленно для применения в системах управления в реальном времени, либо жертвуют точностью, упрощая аэродинамические модели. Это особенно критично в сложных сценариях, где даже незначительные отклонения в расчетах могут существенно повлиять на стабильность полета и эффективность управления. Поэтому, разработка методов, способных одновременно обеспечивать высокую скорость вычислений и достаточную точность, является ключевой задачей в области автономной робототехники.
Бескомпромиссные требования к моделированию аэродинамических эффектов предъявляются к симулятору квадрокоптера SUI Endurance. Незначительные изменения в воздушном потоке вокруг лопастей ротора оказывают существенное влияние не только на устойчивость и управляемость аппарата, но и на его акустическую сигнатуру. Точное воспроизведение этих эффектов, включая вихреобразование и взаимодействие потоков, необходимо для разработки эффективных алгоритмов управления и снижения уровня шума, что критически важно для задач, требующих скрытности и минимального воздействия на окружающую среду. Разработчики стремились к созданию симуляции, способной предсказывать даже самые малые изменения в аэродинамике, обеспечивая реалистичное поведение квадрокоптера в виртуальной среде и повышая точность прогнозирования его характеристик в реальных полевых условиях.
Обеспечение частоты обновления в 30 Гц для приложений реального времени в управлении квадрокоптерами представляет собой серьезную вычислительную задачу, требующую оптимизации как скорости, так и точности моделирования. Разработанный подход демонстрирует успешное решение этой проблемы, достигая средней скорости предсказания в 18.48 миллисекунд. Этот результат позволяет осуществлять высокоточный контроль в реальном времени, учитывая сложные аэродинамические взаимодействия, что критически важно для стабильного и эффективного полета, а также для минимизации акустической сигнатуры. Достигнутая производительность открывает возможности для разработки продвинутых систем автономной навигации и управления, требующих быстрой и надежной обратной связи.
Гауссовские Процессы: Вероятностный Подход к Моделированию
В рамках моделирования динамики квадрокоптеров используется гауссовский процесс (GP) в качестве альтернативы традиционным физически-обоснованным симуляциям. GP представляет собой вероятностную модель, позволяющую обучаться на данных и прогнозировать поведение системы без явного построения и решения дифференциальных уравнений, описывающих физические процессы. Вместо этого, GP аппроксимирует функцию, связывающую входные параметры (например, углы наклона, скорости) с выходными (например, ускорения, моменты сил), используя ковариационную функцию для определения взаимосвязи между различными точками данных. Это позволяет создавать модели, адаптирующиеся к особенностям конкретного квадрокоптера и условиям его эксплуатации, обеспечивая более точные прогнозы по сравнению с жесткими физическими моделями, особенно в условиях неопределенности и шума.
Использование Гауссовских процессов позволяет эффективно моделировать сложные аэродинамические явления без необходимости явного решения ресурсоемких уравнений гидродинамики. Вместо прямого вычисления потока воздуха вокруг квадрокоптера, метод основывается на статистическом моделировании, где функция, описывающая аэродинамические силы и моменты, представляется как Гауссовский процесс. Это позволяет аппроксимировать сложные нелинейные зависимости, используя лишь набор данных, полученных из предварительных симуляций или экспериментов. Такой подход значительно снижает вычислительные затраты по сравнению с численным решением уравнений Навье-Стокса или другими методами вычислительной гидродинамики, сохраняя при этом достаточную точность для задач управления и прогнозирования динамики квадрокоптера.
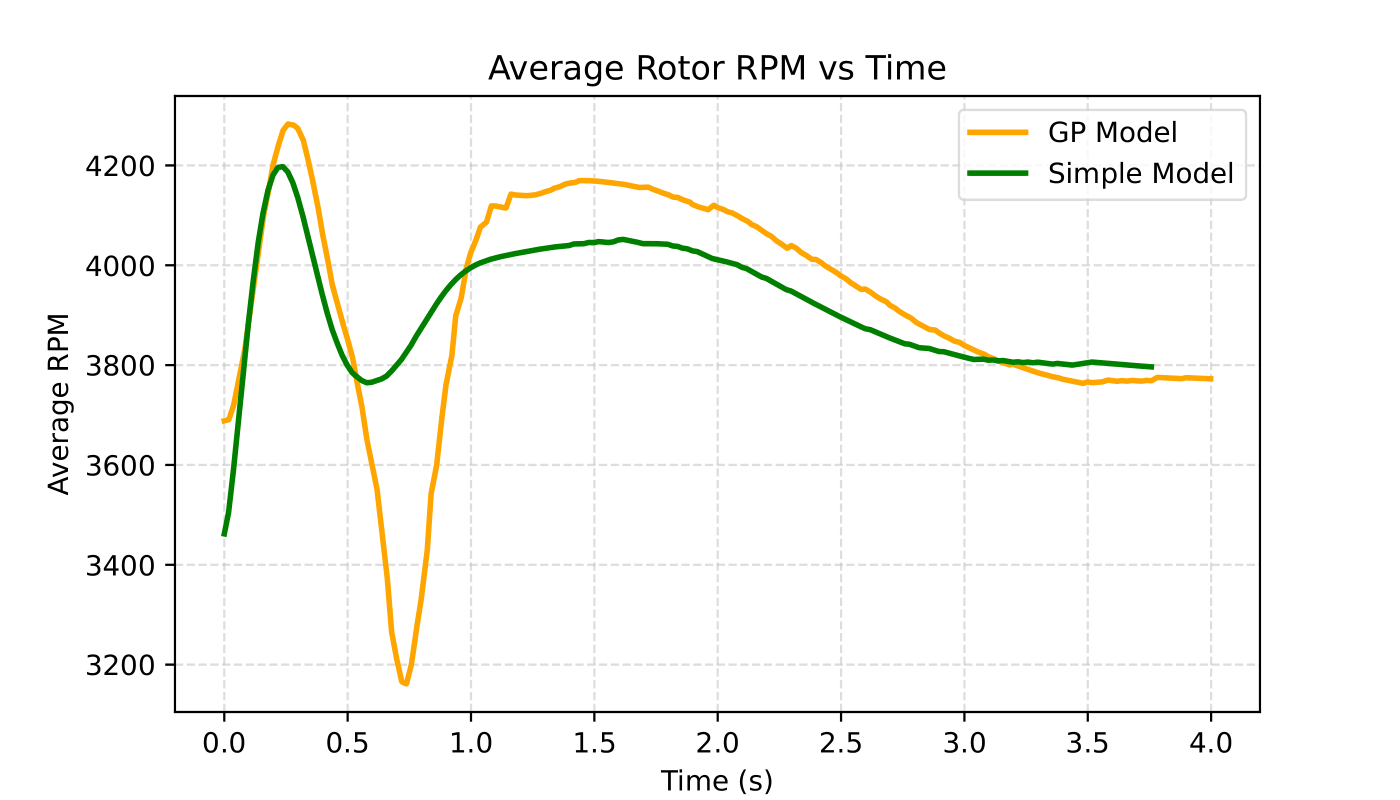
Обучение гауссовского процесса (GP) осуществляется с использованием данных, полученных из двух источников: базовых симуляций и высокоточных аэродинамических расчетов. Базовые симуляции предоставляют начальные данные для модели, позволяя быстро оценить общую динамику квадрокоптера. В то же время, высокоточные аэродинамические расчеты, требующие больших вычислительных ресурсов, обеспечивают более точные данные об аэродинамических силах и моментах, действующих на квадрокоптер. Комбинирование данных из этих двух источников позволяет GP модели эффективно изучать динамику квадрокоптера, сочетая скорость базовых симуляций с точностью высокоточных расчетов, что повышает общую надежность и точность прогнозов.
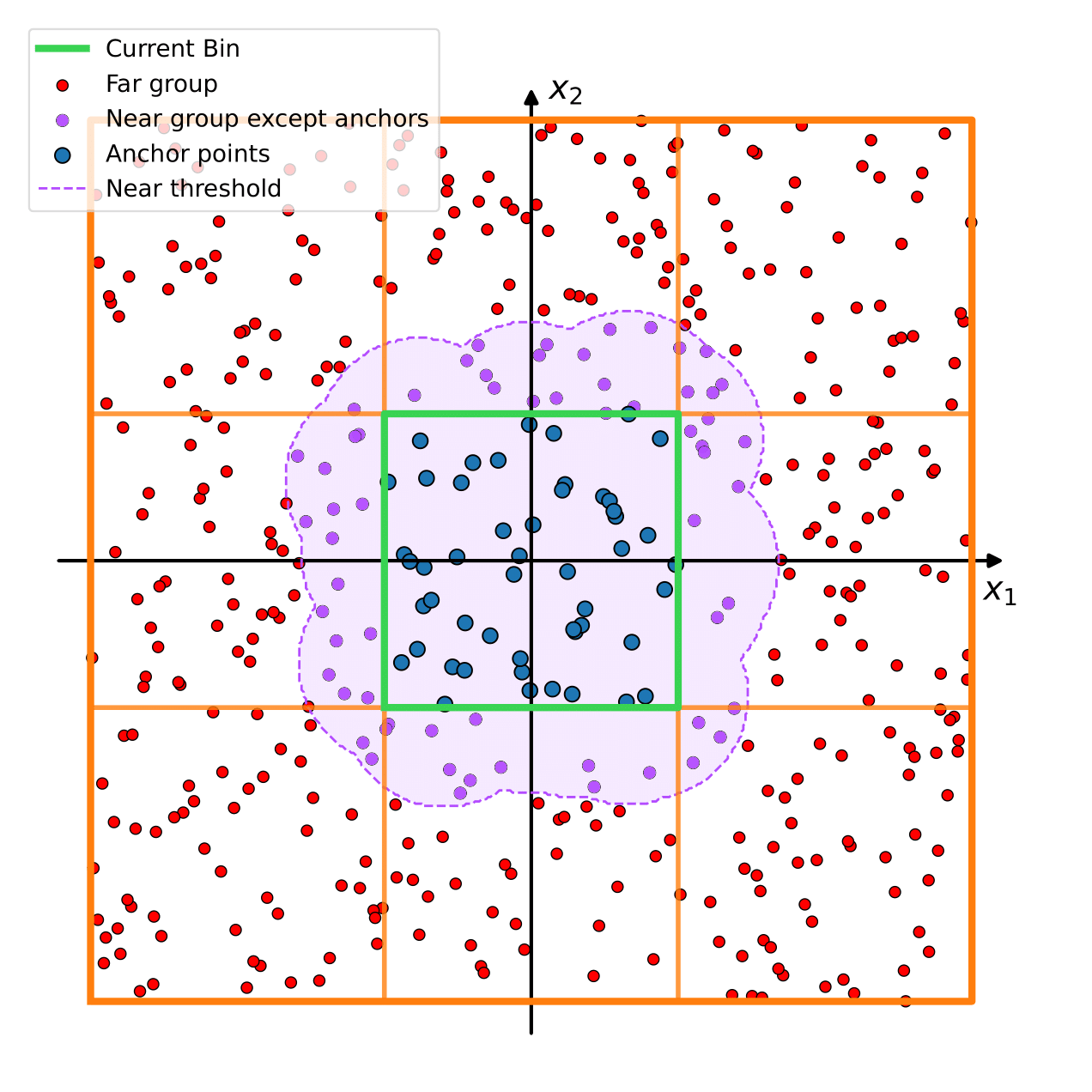
Разделение пространства состояний (State-Space Partitioning) является критически важным для снижения вычислительной нагрузки, связанной с использованием Гауссовских процессов (GP). Этот метод позволяет значительно ускорить время предсказания, достигая приблизительно 50%-ного улучшения производительности по сравнению со стандартными методами разделения GP. Реализация заключается в разбиении полного пространства состояний на несколько подпространств, что позволяет оптимизировать вычисления и уменьшить объем данных, необходимых для предсказания, без существенной потери точности модели. Эффективность данного подхода особенно заметна при работе с высокоразмерными пространствами состояний, характерными для моделирования динамики квадрокоптеров.
Генерация Данных и Стратегия Обучения: Обеспечение Надёжности Прогнозов
Для генерации разнообразного набора данных, используемых в обучении, применяется метод латинского гиперкуба (Latin Hypercube Sampling). Данный метод позволяет эффективно исследовать пространство входных параметров, обеспечивая равномерное покрытие и минимизируя корреляцию между сгенерированными точками. Это критически важно для обучения модели, способной к обобщению и точным предсказаниям в различных условиях, поскольку обеспечивает представительность данных по всему диапазону возможных входных значений и снижает риск переобучения на узком подмножестве данных.
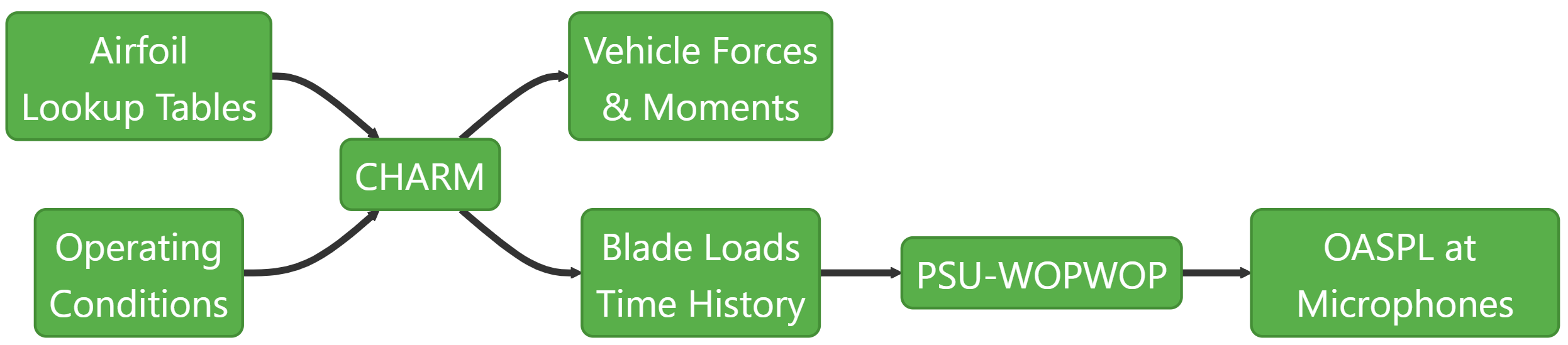
Для создания обучающих данных используется комбинация аэродинамического моделирования с помощью пакета CHARM и моделирования распространения звука посредством PSU-WOPWOP. CHARM выполняет расчеты аэродинамических сил, действующих на конструкцию, в то время как PSU-WOPWOP моделирует распространение акустических волн, генерируемых этими силами. Комбинирование результатов этих двух типов моделирования позволяет получить данные, связывающие входные параметры (состояние и управляющие сигналы) с выходными данными, представляющими собой аэродинамические силы и уровни акустического шума. Такой подход обеспечивает создание комплексного и реалистичного набора данных для обучения модели Gaussian Process (GP).
Модель Гауссова процесса (GP) предназначена для прогнозирования аэродинамических сил и уровней акустического шума на основе входного состояния системы и управляющих сигналов. Обучение модели осуществляется на данных, сгенерированных с использованием аэродинамического моделирования (CHARM) и моделирования распространения звука (PSU-WOPWOP). Входные данные включают параметры, определяющие текущее состояние системы (например, скорость, угол атаки) и команды управления, а выходные данные представляют собой предсказанные значения аэродинамических сил и уровней акустического шума. Таким образом, GP выступает в роли суррогатной модели, позволяющей быстро и эффективно оценивать характеристики системы без проведения дорогостоящих и ресурсоемких численных расчетов.
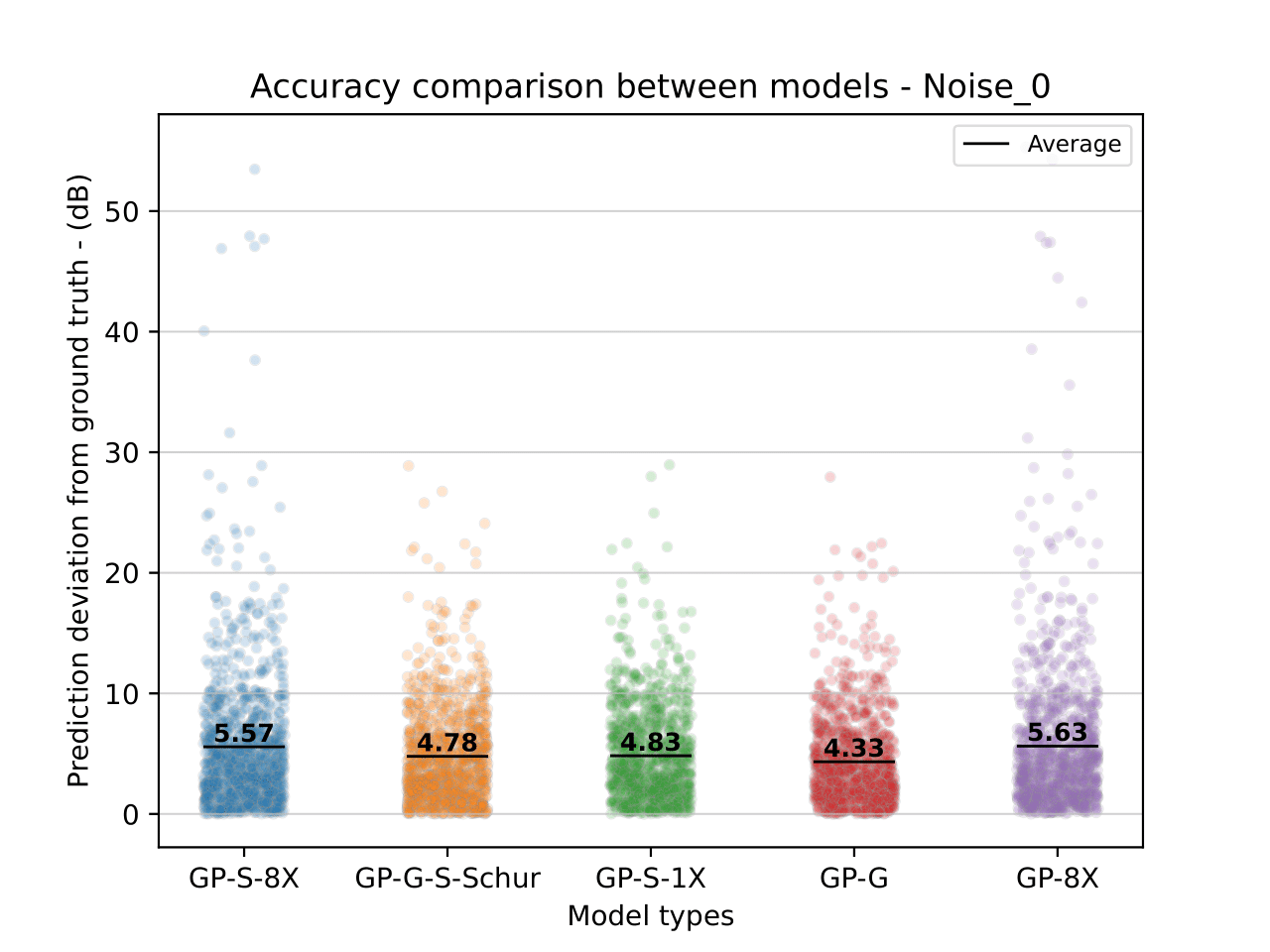
Для повышения точности прогнозирования и вычислительной эффективности модели Гаусса (GP) были реализованы методы аппроксимации дополнения Шура и обусловленности градиента. Данные методы позволяют снизить требования к оперативной памяти до 20 ГБ, что на 5 ГБ меньше, чем требуется для стандартной модели GP, при сохранении или улучшении точности прогнозирования аэродинамических сил и уровней акустического шума. Применение этих техник позволяет эффективно работать с большими объемами данных, характерными для задач аэродинамического моделирования и прогнозирования акустического излучения.
Валидация и Перспективы: К Следующему Поколению Автономных Систем
Разработанная симуляционная платформа демонстрирует заметно повышенную точность предсказаний по сравнению с традиционными методами, особенно в отношении сложных аэродинамических эффектов. В отличие от существующих моделей, которые часто упрощают взаимодействие воздушного потока с летательным аппаратом, данная платформа способна учитывать тончайшие нюансы, такие как вихреобразование на концах крыла и эффекты турбулентности. Это достигается за счет использования продвинутых алгоритмов численного моделирования и высокоточных данных, полученных в результате экспериментальных исследований. Повышенная точность прогнозирования позволяет существенно улучшить характеристики управления беспилотными летательными аппаратами, повысить их устойчивость и маневренность, а также снизить энергопотребление за счет оптимизации аэродинамического профиля и траектории полета.
Разработанный подход демонстрирует эффективный баланс между вычислительной сложностью и точностью моделирования, что позволяет достичь производительности в режиме реального времени. Система обеспечивает частоту обновления в 30 Гц при среднем времени прогнозирования менее 20 миллисекунд. Такая скорость обработки данных критически важна для реализации передовых алгоритмов управления, позволяя беспилотным летательным аппаратам (БПЛА) оперативно реагировать на изменения окружающей среды и поддерживать стабильность полета. Достигнутая производительность открывает возможности для создания более надежных и эффективных систем автономной навигации, расширяя сферу применения воздушной робототехники и автоматизированных систем.
Точное моделирование акустического шума имеет решающее значение для повышения скрытности беспилотных летательных аппаратов (БПЛА) и снижения их воздействия на окружающую среду. Исследования показывают, что шум, производимый БПЛА, может значительно влиять на их обнаружимость и вызывать негативные реакции у населения. Разработка методов, позволяющих предсказывать и минимизировать акустическую сигнатуру БПЛА, открывает возможности для более тихой и экологически безопасной эксплуатации. Совершенствование алгоритмов моделирования позволяет учитывать сложные факторы, влияющие на распространение звука, такие как геометрия аппарата, скорость полета и атмосферные условия. Это, в свою очередь, способствует созданию БПЛА, которые не только эффективны, но и меньше беспокоят окружающую среду и жителей.
Данная работа закладывает основу для создания более надёжных и эффективных систем автономной навигации, открывая перспективы для развития передовых приложений в области воздушной робототехники. Разработанный подход позволяет существенно повысить устойчивость беспилотных летательных аппаратов к внешним возмущениям и неточностям моделирования, что критически важно для выполнения сложных задач в реальных условиях. Улучшенное предсказание аэродинамических сил и моментов, а также точное моделирование акустического шума, способствуют не только повышению безопасности полётов, но и расширению спектра применения беспилотников, включая доставку грузов, мониторинг окружающей среды и проведение поисково-спасательных операций. Перспективные направления включают интеграцию разработанной системы с алгоритмами машинного обучения для адаптации к изменяющимся условиям полёта и оптимизации траекторий, что позволит создавать интеллектуальные воздушные платформы, способные самостоятельно принимать решения и эффективно функционировать в сложных и динамичных средах.
Представленная работа демонстрирует стремление к лаконичности и эффективности в моделировании динамики квадрокоптеров. Авторы, используя фреймворк гауссовских процессов с градиентной обусловленностью и аппроксимацией дополнителем Шура, избегают излишней сложности, что соответствует принципу достижения совершенства через удаление ненужного. Как однажды заметил Марвин Минский: «Лучший способ понять — это создать». В данном случае, создание точной и оперативной модели динамики квадрокоптера позволяет не только улучшить разработку контроллеров, но и приблизить симуляцию к реальности, именно к той, что требует ясного и неперегруженного представления.
Куда Далее?
Представленный подход, хоть и демонстрирует улучшение точности и скорости моделирования динамики квадрокоптера, не решает фундаментальной проблемы: все модели — лишь упрощения. Стремление к идеальной модели — занятие тщеславное. Более плодотворным представляется поиск минимально достаточного описания, освобожденного от избыточной детализации. Упор на градиентное обусловливание и использование дополнений Шурa, безусловно, являются шагами в верном направлении, но они лишь отодвигают неизбежное ограничение — вычислительную сложность.
Будущие исследования, вероятно, будут сосредоточены на адаптивных схемах партиционирования, позволяющих динамически регулировать степень детализации модели в зависимости от текущих условий полета. Использование разреженных гауссовских процессов и методов понижения размерности представляется перспективным направлением. Однако, истинный прогресс требует переосмысления самой концепции моделирования — от попыток воспроизведения реальности к созданию полезных абстракций.
Ясность — это минимальная форма любви. В конечном счете, ценность любой модели определяется не её способностью точно отражать реальность, а её способностью служить инструментом для решения практических задач. Стремление к простоте — не признак слабости, а признак мудрости.
Оригинал статьи: https://arxiv.org/pdf/2602.12487.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Искусственный интеллект и закон: гармония неизбежна
- Вероятностный компьютер на фотонных чипах: новая эра вычислений
- Оптимизация процессов: симбиоз классических и квантовых вычислений
- Квантовые модели для моделирования потоков: новый взгляд на сжатие данных
- Нейросети, повинующиеся физике: новый подход к моделированию сложных систем
- Моделирование биомолекул: новый импульс от нейросетей
- Геометрия устойчивости: новый взгляд на представления в нейросетях
- БиоАгент: Проверка ИИ на прочность в мире геномики
- Нейронные Заросли: Как Модели Находят Оптимальные Решения
- Иллюзии понимания: Как правильно оценивать объяснимые модели
2026-02-17 04:57