Автор: Денис Аветисян
Новая модель RynnBrain демонстрирует впечатляющие возможности в области воплощенного интеллекта, позволяя роботам воспринимать, рассуждать и планировать действия в реальном пространстве и времени.
Представлена открытая фундаментальная модель для воплощенного интеллекта, объединяющая мультимодальное обучение, пространственно-временное рассуждение и учет физических законов.
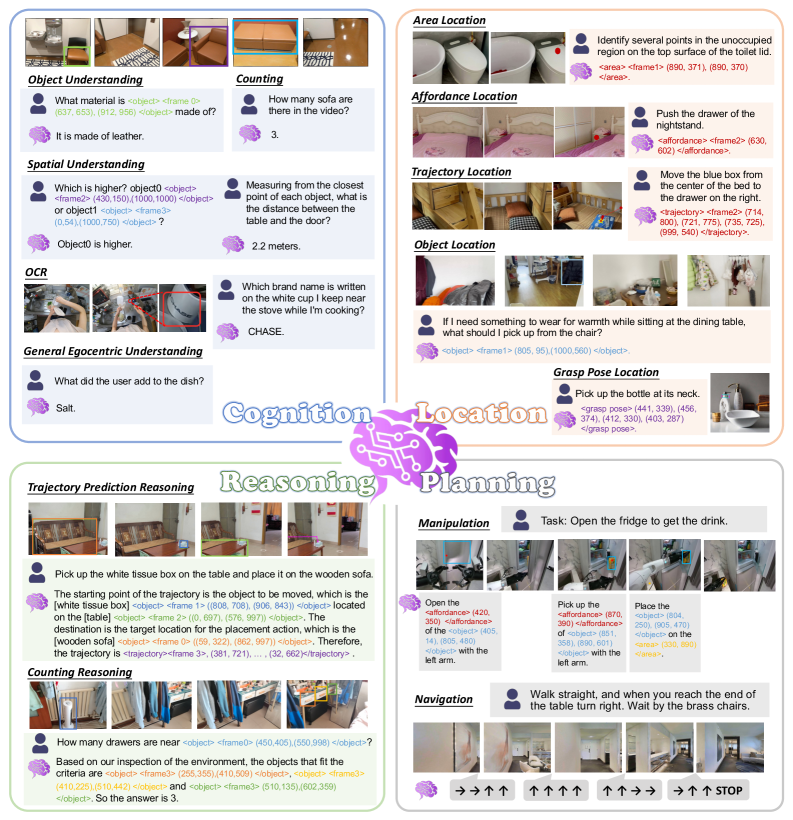
Несмотря на значительный прогресс в области мультимодальных фундаментальных моделей, сообществу, занимающемуся воплощенным интеллектом, по-прежнему не хватает единой, физически обоснованной модели, объединяющей восприятие, рассуждения и планирование во временном и пространственном контексте реального мира. В настоящей работе представлена RynnBrain, открытая пространственно-временная фундаментальная модель для воплощенного интеллекта. Модель RynnBrain усиливает четыре ключевые способности в рамках единого фреймворка: всестороннее эгоцентрическое понимание, разнообразную пространственно-временную локализацию, физически обоснованные рассуждения и планирование с учетом законов физики. Каковы перспективы использования RynnBrain в качестве основы для разработки более сложных и адаптивных робототехнических систем?
Предчувствие Системы: Связь Восприятия и Рассуждений
Традиционные системы искусственного интеллекта часто сталкиваются с трудностями при сопоставлении лингвистических конструкций с реальным пространственным окружением, что является серьезным препятствием на пути к созданию действительно воплощенного интеллекта. Вместо понимания смысла фраз в контексте физического мира, эти системы, как правило, обрабатывают язык как абстрактный набор символов, оторванный от ощутимой реальности. Это приводит к тому, что даже простые команды, связанные с ориентацией в пространстве или манипулированием объектами, могут оказаться непосильными для ИИ, лишенного способности «заземлить» язык в физическом опыте. В результате, системы, не способные связать слова с конкретными местами, объектами и возможными действиями в окружающей среде, демонстрируют ограниченную гибкость и эффективность в реальном мире, что существенно ограничивает их потенциал для создания автономных агентов, способных к полноценному взаимодействию с физическим миром.
Современные методы искусственного интеллекта часто демонстрируют хрупкость в работе из-за неспособности бесшовно объединять зрительное восприятие с задачами, требующими сложного логического мышления. Несмотря на значительные успехи в области компьютерного зрения и обработки естественного языка, интеграция этих двух областей остается серьезной проблемой. Когда алгоритм сталкивается с незнакомыми ситуациями или нечеткими визуальными данными, отсутствие глубокого понимания контекста приводит к ошибкам и непредсказуемому поведению. Вместо того, чтобы формировать целостное представление о мире, система часто опирается на поверхностные признаки, что делает её уязвимой к даже небольшим изменениям в окружающей среде. Эта проблема особенно актуальна в динамичных условиях, где требуется быстро адаптироваться к новым обстоятельствам и принимать обоснованные решения, основанные на визуальной информации и логических рассуждениях.
Для успешной навигации в динамичных средах искусственному интеллекту необходимо понимать возможности объектов и планировать действия, исходя из окружающего пространства. Это означает, что система должна не просто распознавать объекты, но и оценивать, какие действия с ними возможны — можно ли поднять предмет, обойти препятствие или использовать инструмент для достижения цели. Такое понимание, известное как восприятие аффордансов, требует интеграции визуальной информации с знаниями о физике и причинно-следственных связях. Способность предвидеть последствия своих действий и выбирать оптимальные траектории движения является ключевым элементом для создания действительно автономных и адаптивных систем, способных функционировать в сложных, меняющихся условиях, будь то робот-исследователь или автоматизированный транспорт.
RynnBrain: Пространственно-Временной Фундамент Воплощенного Разума
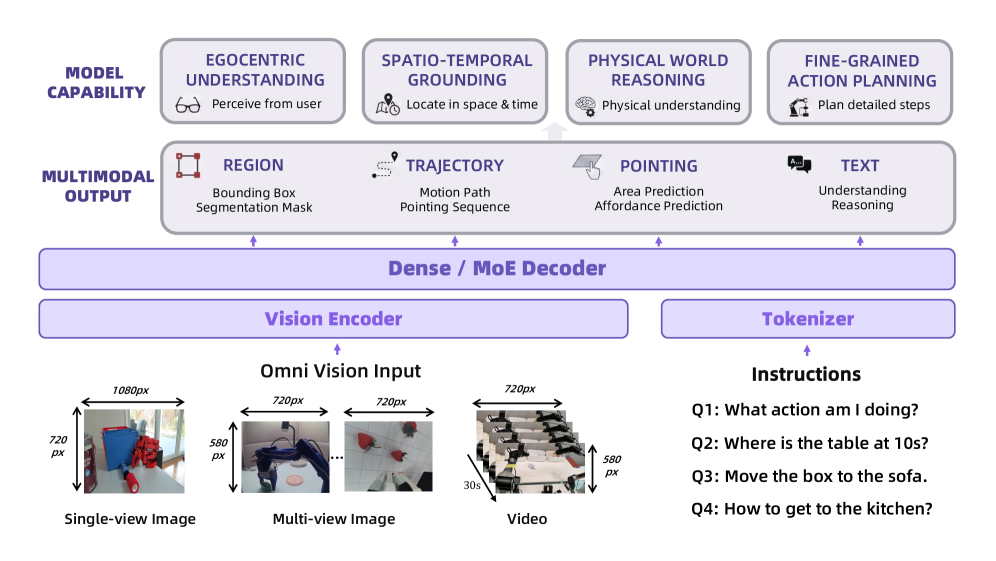
RynnBrain использует большую языковую модель (LLM) в сочетании с продвинутыми визуальными энкодерами и проекторами для создания комплексного мультимодального представления окружающей среды. Визуальные энкодеры преобразуют данные, полученные с датчиков зрения, в векторные представления, которые затем обрабатываются LLM. Проекторы, в свою очередь, позволяют LLM генерировать визуальные выходные данные, что обеспечивает обратную связь и возможность взаимодействия с окружающей средой. Такая архитектура позволяет системе одновременно обрабатывать и понимать как текстовую, так и визуальную информацию, создавая более полное и контекстуально-обогащенное представление о мире.
Архитектура RynnBrain использует методы DeepStack и Interleaved MRoPE для улучшения слияния визуальной и лингвистической информации, что способствует более надежному пониманию окружающей среды. DeepStack позволяет обрабатывать визуальные данные в виде стека, повышая эффективность извлечения признаков. Interleaved MRoPE (Multi-head Relative Positional Encoding) обеспечивает более точное кодирование позиционной информации в процессе объединения визуальных и текстовых представлений, что позволяет модели учитывать пространственные отношения между объектами и их описаниями. Комбинация этих подходов обеспечивает улучшенное семантическое понимание и более эффективное взаимодействие с окружающей средой.
Архитектура RynnBrain оптимизирована для масштабируемости и эффективного обучения за счет применения нескольких методов параллелизации и оптимизации памяти. ZeRO-1 и ZeRO-2 (Zero Redundancy Optimizer) позволяют распределить параметры модели, градиенты и состояния оптимизатора между несколькими GPU, снижая требования к памяти каждого устройства. Онлайн-балансировка нагрузки (Online Load Balancing) динамически распределяет вычислительные задачи между доступными ресурсами, обеспечивая равномерную загрузку и минимизацию простоев. Метод Expert Parallel (EP) использует разделение модели на экспертов, каждый из которых специализируется на определенной части задачи, что позволяет увеличить пропускную способность и уменьшить время обучения. Комбинация этих методов позволяет эффективно обучать большие модели на кластерах GPU.
Цепочка Мыслей: Закрепление Языка в Пространственном Контексте
Модель RynnBrain-CoP, прошедшая тонкую настройку с использованием метода Chain-of-Point (CoP), демонстрирует высокую эффективность в интеграции пространственной привязки с текстовым выводом. Это достигается за счет способности модели учитывать пространственные отношения между объектами и событиями, что позволяет ей более точно интерпретировать текстовые инструкции и принимать обоснованные решения в контексте окружающей среды. В процессе принятия решений, RynnBrain-CoP явно соотносит лингвистическую информацию с пространственным окружением, обеспечивая повышенную надежность и точность результатов.
Подход, используемый в RynnBrain-CoP, позволяет модели последовательно анализировать задачу, явно учитывая пространственные взаимосвязи между объектами в окружающей среде. Вместо непосредственного сопоставления входных данных с результатом, модель формирует промежуточные представления, отражающие положение объектов, их взаимное расположение и изменения этих параметров во времени. Такой подход к рассуждению позволяет модели более точно интерпретировать сложные инструкции и принимать обоснованные решения, особенно в задачах, требующих понимания пространственно-временных отношений и планирования действий в окружающей среде. В процессе анализа модель выстраивает цепочку логических выводов, основанных на пространственном контексте, что способствует повышению надежности и точности принимаемых решений.
Модель RynnBrain-CoP демонстрирует повышенную эффективность в задачах, требующих одновременного понимания языка и пространственного мышления. В ходе тестирования было зафиксировано приблизительно 7%-ное улучшение результатов в сложных пространственно-временных задачах по сравнению с базовыми методами. Данное улучшение свидетельствует о способности модели более точно интегрировать лингвистическую информацию с пространственным контекстом, что позволяет ей эффективнее решать задачи, требующие анализа и интерпретации информации, связанной с положением объектов в пространстве и их изменения во времени.
От Навигации к Действию: Реальные Применения
Система RynnBrain-Nav, разработанная для визуальной навигации по языковым инструкциям, демонстрирует передовые результаты благодаря использованию симулятора Habitat. Данная платформа позволяет модели обучаться в реалистичных, сложных виртуальных средах, эффективно интерпретируя естественный язык и преобразуя его в последовательность действий для успешной навигации. Обучение в симуляторе Habitat обеспечивает не только высокую точность следования инструкциям, но и позволяет системе адаптироваться к новым, ранее не встречавшимся помещениям, что делает RynnBrain-Nav мощным инструментом для широкого спектра применений, от робототехники до виртуальной реальности.
Исследования показали, что RynnBrain-Nav демонстрирует превосходство над моделями, основанными на Qwen3-VL, в задачах навигации по сложным средам. Эта система достигла самых современных результатов на ключевых бенчмарках — R2R (Refill-2-Retrieve) и RxR (Room-to-Room), что свидетельствует о её высокой эффективности в понимании естественного языка и точном следовании инструкциям для перемещения в пространстве. Полученные показатели подтверждают, что RynnBrain-Nav является передовым решением в области навигации, способным успешно ориентироваться и выполнять задачи в реалистичных виртуальных средах.
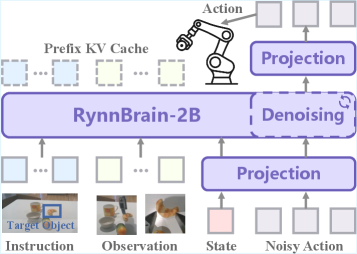
Система RynnBrain-VLA значительно расширяет возможности навигации, преобразуя разработанные планы в конкретные, выполнимые действия для роботов. В основе этой способности лежит модель DiT, которая служит надежным фундаментом для понимания окружающей среды и взаимодействия с ней. Благодаря DiT, RynnBrain-VLA способна не просто интерпретировать инструкции, но и генерировать последовательность команд, необходимых для успешного выполнения задачи в реальном мире. Такой подход позволяет создавать роботов, способных к автономному планированию и выполнению сложных задач, от навигации в незнакомой среде до манипулирования объектами, открывая новые перспективы в области робототехники и автоматизации.
RynnBrain-Bench: Измерение Будущего Воплощенного ИИ
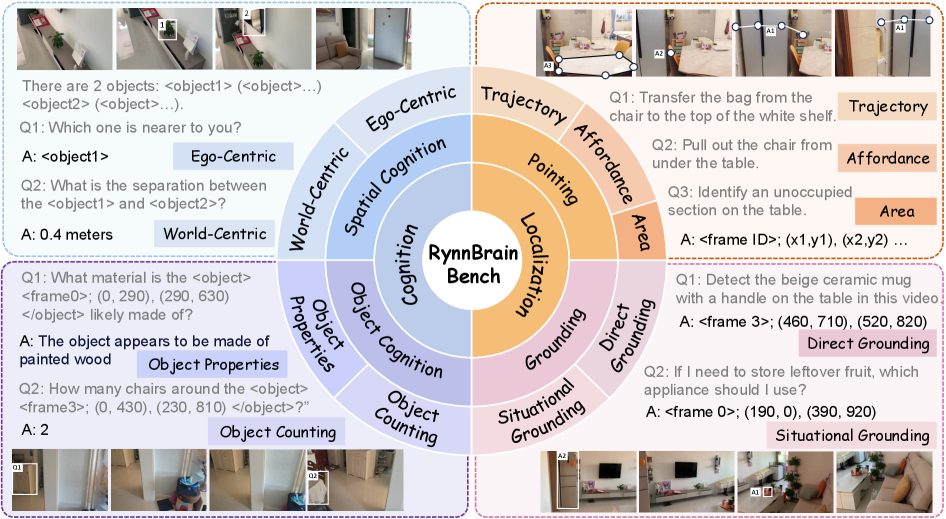
Платформа RynnBrain-Bench представляет собой стандартизированную среду для оценки способности воплощенных моделей искусственного интеллекта понимать пространственно-временные взаимосвязи и точно определять свое местоположение. Эта среда позволяет проводить всестороннее тестирование, оценивая, насколько эффективно модель воспринимает окружающую среду, рассуждает о ней и взаимодействует с ней. В отличие от существующих подходов, RynnBrain-Bench обеспечивает объективную и воспроизводимую оценку, что крайне важно для сравнения различных алгоритмов и отслеживания прогресса в области воплощенного ИИ. Благодаря тщательно разработанным сценариям и метрикам, платформа позволяет исследователям выявлять сильные и слабые стороны моделей, способствуя разработке более надежных и интеллектуальных систем, способных успешно функционировать в реальном мире.
Платформа RynnBrain-Bench осуществляет строгую проверку способности моделей искусственного интеллекта воспринимать окружающую среду, логически осмысливать полученные данные и эффективно взаимодействовать со сложными условиями. Исследование охватывает широкий спектр сценариев, имитирующих реальные задачи, что позволяет оценить не только точность восприятия, но и способность к адаптации и принятию решений в динамически меняющейся обстановке. Такой подход гарантирует надежность и устойчивость работы моделей в различных ситуациях, подчеркивая их готовность к применению в практических задачах, требующих взаимодействия с физическим миром.
Разработанная платформа RynnBrain-Bench продемонстрировала передовые результаты в оценке возможностей воплощенного искусственного интеллекта, подтвердив эффективность фреймворка RynnBrain. Исследования показали, что модели, обученные и протестированные на RynnBrain-Bench, значительно превосходят существующие аналоги в задачах, требующих пространственного и временного понимания окружающей среды. Это выражается в более точной локализации, эффективном взаимодействии со сложными объектами и надежном выполнении задач в динамичных условиях. Полученные результаты свидетельствуют о потенциале RynnBrain в качестве ключевого инструмента для развития следующего поколения интеллектуальных систем, способных к адаптации и автономной работе в реальном мире.
Изучение RynnBrain, представленное в данной работе, демонстрирует неизбежную сложность систем, стремящихся к воплощенному интеллекту. Модель, фокусируясь на пространственно-временном рассуждении и физическом обосновании, не просто решает задачи навигации и планирования, но и создает основу для будущих взаимосвязей и зависимостей. Как некогда заметил Анри Пуанкаре: «Математика не учит нас как добавлять или вычитать, а как мыслить». RynnBrain, подобно любой сложной системе, демонстрирует, что разделение на компоненты — это лишь отсрочка неизбежной синхронной неудачи, если не учитывать фундаментальные связи и общие точки отказа. Архитектурные решения, заложенные в основу модели, предсказывают будущие сбои, и понимание этих взаимосвязей является ключом к созданию устойчивых систем.
Что дальше?
Представленная работа, как и любая попытка построить фундамент для интеллекта, скорее напоминает посев семян, нежели возведение крепости. RynnBrain демонстрирует способность к пространственно-временному рассуждению, но каждое новое измерение, каждая зависимость от конкретной среды — это обещание, данное прошлому, и гарантия будущих поломок. Не стоит обольщаться иллюзией контроля; даже самые сложные системы рано или поздно начинают самовосстановление, причем не всегда в желаемом направлении.
Истинный вызов заключается не в увеличении масштаба модели, а в понимании её внутренней логики. Вместо того, чтобы стремиться к универсальности, стоит признать, что каждый агент, действующий в конкретном мире, требует уникального “языка”, уникальной модели восприятия. Иначе, все эти сложные архитектуры превратятся в дорогостоящие, но бесполезные инструменты, неспособные адаптироваться к непредвиденным обстоятельствам.
Будущее, вероятно, за системами, которые не столько “думают”, сколько “чувствуют” мир вокруг себя, реагируя на изменения не по заранее заданным алгоритмам, а интуитивно, как живой организм. И тогда, возможно, мы поймем, что цель не в создании искусственного интеллекта, а в раскрытии потенциала интеллекта естественного.
Оригинал статьи: https://arxiv.org/pdf/2602.14979.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Карта ошибок: Анатомия сбоев больших языковых моделей
- Надежность ускорителей: от замысла до реализации
- Квантовые нейросети для реалистичной 3D-визуализации
- Искусство синтеза: Новая модель для объединения текста и изображений
- Накапливая опыт: мультимодальные агенты, которые учатся на ходу
- Квантовые Загадки: От Теории к Реальности
- Оптимизация запросов: Новый подход для сложных рабочих процессов
- Диффузия и обучение с подкреплением: новый подход к масштабированию
- Квантовые алгоритмы против нейросетей: есть ли смысл в переходе?
- Диалоги с Искусственным Интеллектом: Как Проверить Надежность?
2026-02-20 03:32