Автор: Денис Аветисян
Новый подход позволяет большим языковым моделям взаимодействовать с научными симуляциями, получая опыт «в процессе» и повышая достоверность результатов.
В статье представлена платформа EmbodiedAct, объединяющая большие языковые модели с симуляциями для активного взаимодействия, проверки ограничений и самокоррекции в научных исследованиях.
Несмотря на значительный потенциал больших языковых моделей (LLM) в научных открытиях, их применение затруднено разрывом между теоретическим рассуждением и верифицируемым физическим моделированием. В работе, озаглавленной ‘Grounding LLMs in Scientific Discovery via Embodied Actions’, предложен фреймворк EmbodiedAct, преобразующий стандартное научное программное обеспечение в активных агентов, обеспечивая LLM возможностью взаимодействия с симуляциями в режиме реального времени. Этот подход, основанный на тесной интеграции восприятия и исполнения, значительно превосходит существующие решения, обеспечивая стабильность и надежность в долгосрочных симуляциях и повышая точность научного моделирования. Способны ли подобные системы с активным воплощением стать основой для нового поколения инструментов автоматизированных научных исследований?
За пределами Статичного Моделирования: Необходимость Воплощенного Рассуждения
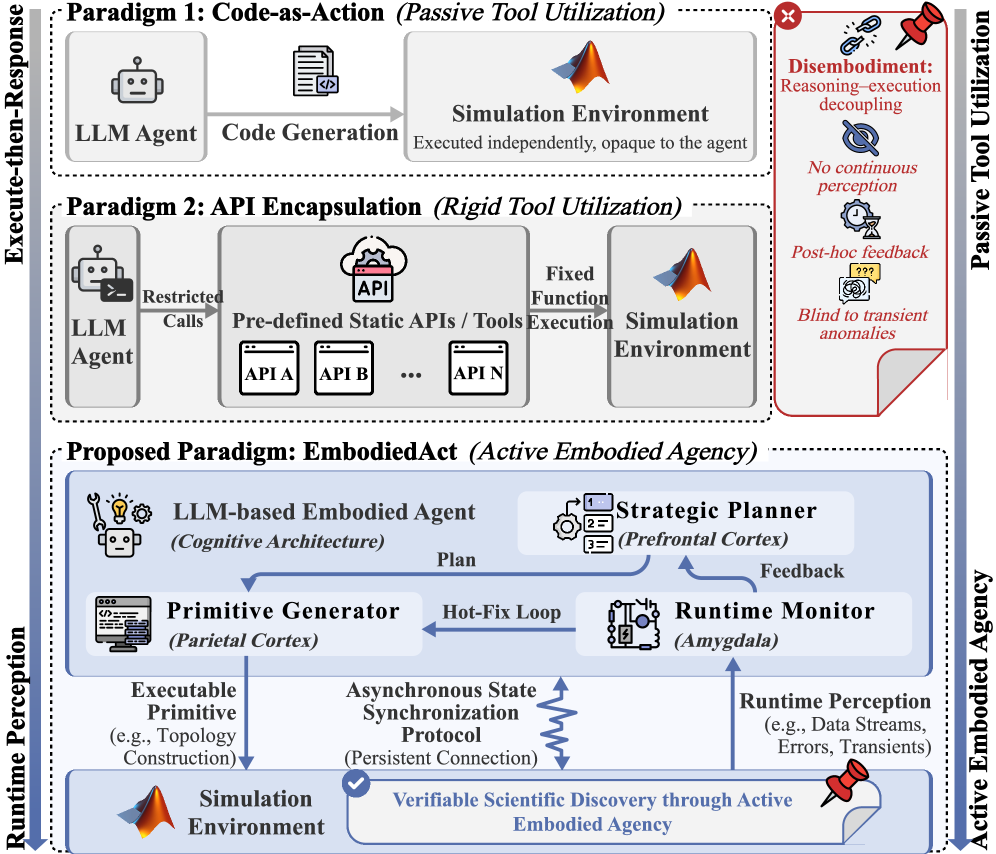
Традиционные научные симуляции зачастую базируются на статичном коде, что существенно ограничивает их способность адаптироваться к меняющимся обстоятельствам и исследовать сложные, непредсказуемые сценарии. Данный подход предполагает предварительное определение всех возможных параметров и взаимодействий, что делает его неэффективным при моделировании систем, характеризующихся высокой степенью неопределенности или динамическим поведением. В результате, даже небольшие отклонения от заданных условий могут привести к неточностям или полному краху симуляции. Такая статичность препятствует исследованию новых, неожиданных явлений и требует постоянной ручной корректировки кода для учета меняющихся факторов, что делает процесс моделирования трудоемким и не всегда эффективным в контексте быстро развивающихся научных задач.
Существующие методы моделирования часто сталкиваются с проблемами во время выполнения, когда неожиданные ситуации приводят к ошибкам и прерыванию процесса. Традиционный подход требует постоянной итеративной доработки кода на основе наблюдений, полученных в реальном времени, что значительно замедляет исследования и ограничивает возможности изучения сложных систем. Особенно остро эта проблема проявляется в динамических средах, где предсказать все возможные сценарии заранее практически невозможно. Необходимость ручной корректировки и отладки в ответ на возникающие ошибки существенно снижает эффективность моделирования и требует значительных временных затрат, препятствуя быстрому получению новых знаний и пониманию сложных процессов.
Необходим принципиально новый подход к моделированию, объединяющий агентов, способных к рассуждениям, непосредственно с симуляционными средами. Вместо статических, заранее запрограммированных процессов, предлагается динамическая система, где агенты взаимодействуют с виртуальным миром, анализируют результаты и адаптируют свои действия в режиме реального времени. Такой симбиоз позволяет не просто предсказывать поведение сложных систем, но и активно исследовать неизведанные сценарии, обнаруживать неожиданные закономерности и непрерывно совершенствовать модели на основе полученных данных. Это открывает возможности для прорывных исследований в областях от робототехники и материаловедения до экономики и социальных наук, позволяя перейти от пассивного наблюдения к активному научному открытию.
EmbodiedAct: Архитектура для Проверяемого Открытия
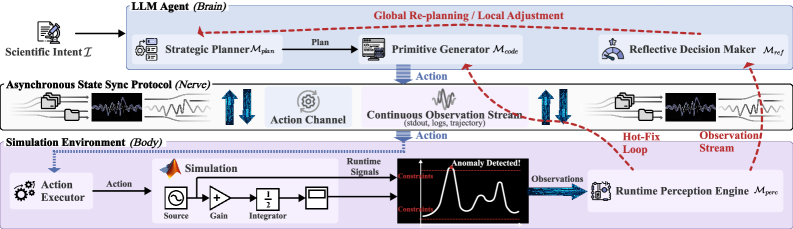
Архитектура EmbodiedAct использует большие языковые модели (LLM) в качестве движков логического вывода внутри среды моделирования, что позволяет решать задачи динамически. Вместо статического планирования, LLM обрабатывают текущее состояние симуляции и принимают решения на основе этого анализа. Это обеспечивает адаптацию к изменяющимся условиям и позволяет системе самостоятельно находить решения, не требуя предварительно заданных сценариев. Интеграция LLM позволяет системе не только выполнять команды, но и рассуждать о проблеме, планировать действия и корректировать стратегию в процессе выполнения симуляции, что существенно повышает её гибкость и эффективность.
В основе архитектуры EmbodiedAct лежит асинхронный протокол синхронизации состояний, обеспечивающий непрерывное взаимодействие между большой языковой моделью (LLM) и научным программным обеспечением. Данный протокол позволяет LLM запрашивать текущее состояние симуляции, а программному обеспечению — сообщать об изменениях, без необходимости синхронного ожидания ответа. Асинхронность позволяет LLM продолжать планирование и анализ, пока симуляция выполняется, существенно повышая общую скорость и эффективность процесса решения научных задач. Протокол обеспечивает надежную передачу данных о состоянии, необходимую для принятия обоснованных решений и адаптации стратегии симуляции в реальном времени.
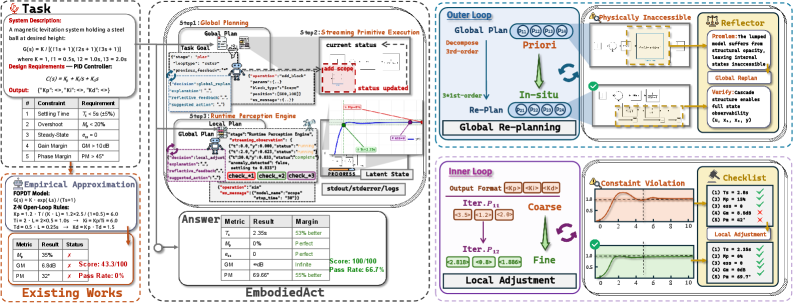
Стратегический планировщик в архитектуре EmbodiedAct выполняет декомпозицию сложной научной задачи на иерархические исполнительные шаги, определяя последовательность действий для проведения симуляции. Этот процесс включает в себя разбиение исходной цели на подзадачи, которые, в свою очередь, разбиваются на более элементарные операции. Иерархическая структура позволяет эффективно управлять сложностью задачи, обеспечивая последовательное выполнение шагов симуляции и контроль над процессом достижения научной цели. Планировщик генерирует план, определяющий порядок и взаимосвязи между исполнительными шагами, что служит руководством для дальнейшего преобразования в конкретные команды для программного обеспечения симуляции.
Генератор примитивов преобразует декомпозированные шаги выполнения, полученные от Стратегического Планировщика, в конкретные команды, понятные используемому научному программному обеспечению. Этот процесс включает в себя трансляцию высокоуровневых инструкций в низкоуровневые вызовы функций или API, специфичные для целевой симуляционной среды. Ключевым аспектом является обеспечение совместимости синтаксиса и семантики между логикой, управляемой Большой Языковой Моделью (LLM), и фактическим исполнением в симуляции, что гарантирует бесперебойное и корректное выполнение заданных задач. Генератор примитивов также отвечает за управление типами данных и параметрами, необходимыми для каждого примитива, а также за обработку возможных ошибок или исключений, возникающих в процессе трансляции и выполнения.
Непрерывное Восприятие и Адаптивное Перепланирование
EmbodiedAct использует механизм восприятия в реальном времени (Runtime Perception), позволяющий системе непрерывно отслеживать состояние симуляционной среды. Этот процесс включает в себя сбор данных о текущих параметрах среды, таких как положение объектов, их свойства и взаимосвязи. Полученная информация обрабатывается для вывода текущего состояния симуляции, что позволяет системе динамически адаптироваться к изменяющимся условиям и корректировать свои действия без необходимости полной перезагрузки или пересчета. Такой подход критически важен для обеспечения надежности и эффективности работы системы в сложных и непредсказуемых средах.
Система контроля во время выполнения (Runtime Monitor) осуществляет непрерывный мониторинг жизненного цикла симуляции. Данный компонент предназначен для выявления потенциальных рисков и ошибок, возникающих в процессе работы симуляции, таких как выход за пределы допустимых параметров, конфликты между агентами или неожиданное поведение среды. Обнаружение аномалий происходит в режиме реального времени, что позволяет оперативно реагировать на возникающие проблемы и предотвращать критические сбои в работе системы. Мониторинг охватывает все этапы симуляции, начиная от инициализации и заканчивая завершением, обеспечивая стабильность и надежность работы.
Приниматель рефлексивных решений (Reflective Decision Maker) анализирует результаты выполнения действий в симуляции и, основываясь на заданных ограничениях, корректирует план дальнейших действий. Этот компонент оценивает текущее состояние среды и прогресс в достижении целей, определяя необходимость перепланирования для адаптации к изменяющимся условиям. Процесс включает в себя оценку достигнутых результатов, выявление отклонений от ожидаемых, и генерацию новых стратегий, соответствующих текущим ограничениям и целям. Такой подход позволяет системе динамически адаптироваться к непредвиденным ситуациям и повышать эффективность выполнения задач.
В системе EmbodiedAct реализован механизм «горячей доработки» (Hot-Fix Loop), предназначенный для выявления и устранения ошибок, возникающих непосредственно в процессе симуляции. Данный механизм позволяет динамически перекалибровать параметры симуляции в ответ на непредвиденные ситуации, обеспечивая повышенную устойчивость и надежность работы системы. В результате внедрения Hot-Fix Loop наблюдается увеличение средней оценки на 17.6% по сравнению с базовой моделью CodeAct, что подтверждает эффективность данного подхода к адаптации и повышению производительности.
За пределами CodeAct: Новая Парадигма для Научного Исследования
В отличие от базовых методов, таких как CodeAct, разработанная система EmbodiedAct демонстрирует способность к динамической адаптации и обучению непосредственно в процессе симуляции. Такой подход позволяет значительно повысить эффективность выполнения задач, что подтверждается увеличением среднего балла на 17.6% и улучшением процента успешного прохождения испытаний на 35.5%. Это свидетельствует о том, что интеграция процессов рассуждения и действий в единый цикл позволяет системе не просто следовать заданному алгоритму, а активно приспосабливаться к изменяющимся условиям и находить оптимальные решения, что открывает новые перспективы для автоматизации научных исследований и ускорения темпов инноваций.
В рамках данной исследовательской работы была разработана система, объединяющая процессы рассуждения и действия для углубленного изучения сложных сценариев и выявления новых знаний. В отличие от традиционных подходов, где анализ и выполнение разделены, данная архитектура позволяет моделировать взаимодействие между теоретическим обдумыванием и практическим применением. Это достигается посредством непрерывного цикла: система выдвигает гипотезу, реализует ее в симуляции, анализирует результаты и, при необходимости, корректирует первоначальный план. В результате, она способна не только решать поставленные задачи, но и самостоятельно находить неочевидные решения, расширяя границы понимания в исследуемой области и открывая возможности для инноваций, которые были бы недоступны при использовании стандартных методов.
Система демонстрирует повышенную надежность и устойчивость симуляций благодаря непрерывному наблюдению за ходом исследования и адаптивному перепланированию действий. Несмотря на то, что генератор примитивов потребляет 58% от общего числа токенов, данная вычислительная нагрузка оправдана существенным улучшением точности и надежности результатов. Такой подход позволяет не просто выполнять запланированные действия, но и корректировать стратегию в процессе, учитывая изменяющиеся условия и получаемые данные, что критически важно для моделирования сложных научных явлений и получения достоверных выводов.
Предложенный подход открывает перспективы для автоматизации научных исследований и ускорения темпов инноваций, несмотря на увеличение потребления токенов в 10.6 раза по сравнению с базовыми методами. Данный прирост вычислительных затрат оправдан значительным улучшением способности системы к самостоятельному исследованию и получению новых знаний. Автоматизация процесса научного поиска позволяет существенно сократить время, необходимое для проверки гипотез и обнаружения закономерностей, что, в свою очередь, способствует более быстрому развитию науки и технологий. Несмотря на более высокие требования к ресурсам, возможность автоматического проведения экспериментов и анализа данных предоставляет уникальный инструмент для решения сложных научных задач и открытия новых горизонтов в различных областях знаний.
Исследование демонстрирует, что попытки построить идеальную систему для научных открытий обречены на провал. Авторы предлагают не создавать, а взращивать систему, позволяя ей эволюционировать через взаимодействие с симуляциями и постоянную верификацию ограничений. Этот подход напоминает о словах Джона Маккарти: «Всякий искусственный интеллект — это лишь отражение человеческого глупости». В данном контексте, это означает, что даже самые передовые языковые модели нуждаются в постоянной обратной связи и самокоррекции, чтобы избежать ошибок и предвзятости, особенно при работе с научными данными. Идея активного воплощения, предложенная в работе, позволяет модели не просто обрабатывать информацию, но и «действовать» в симуляции, тем самым проверяя свои гипотезы и выявляя несоответствия, что соответствует принципу систем как развивающихся экосистем.
Куда Ведет Этот Путь?
Представленная работа, стремясь привязать языковые модели к миру научных симуляций, не столько решает проблему, сколько обнажает её истинный масштаб. Идея “воплощения” — дать модели возможность взаимодействовать с окружением — лишь отодвигает вопрос: что есть это окружение? Каждая симуляция — упрощение, пророчество о тех аспектах реальности, которые посчитали важными для моделирования. Система, никогда не сталкивающаяся с непредсказуемостью, обречена на преждевременную смерть.
Стремление к “самокоррекции” в замкнутом цикле — соблазнительно, но опасно. Поиск оптимального решения в рамках заданных ограничений неизбежно приводит к локальным минимумам, к игнорированию тех данных, что не укладываются в принятую парадигму. Истинное открытие требует готовности к разрушению существующих представлений, к принятию ошибок как необходимой части процесса. В идеальном решении не остаётся места для человека.
Будущее этого направления, вероятно, лежит не в совершенствовании симуляций, а в создании систем, способных интегрировать данные из разнородных источников, признавать собственную неполноту и учиться на ошибках, которые неизбежно возникнут при столкновении с непредсказуемой реальностью. Системы — это не инструменты, а экосистемы. Их нельзя построить, только вырастить.
Оригинал статьи: https://arxiv.org/pdf/2602.20639.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Карта ошибок: Анатомия сбоев больших языковых моделей
- Ядерный синтез и Искусственный Интеллект: Новый подход к проектированию реакторов
- Надежность ускорителей: от замысла до реализации
- Квантовые нейросети для реалистичной 3D-визуализации
- Мощное моделирование жидкости: новый подход к методу решетчатых уравнений Больцмана
- Нейросеть предсказывает сродство антител к COVID-19
- Память как у живого мозга: новый подход к локальному AI
- Искусственный интеллект на службе материалов: от открытий до инноваций
- Кто несет ответственность за ИИ: новый взгляд на причинно-следственные связи
- Квантовый транспорт в сложных системах: новый подход к моделированию
2026-02-25 14:54