Автор: Денис Аветисян
В статье анализируются ключевые препятствия на пути к созданию полностью автономных транспортных средств и рассматриваются перспективные подходы, основанные на искусственном интеллекте и новых архитектурах.
Обзор текущих ограничений систем автономного вождения, включая проблемы ситуационной осведомленности и семантического разрыва, и оценка потенциала сквозного обучения и фундаментальных моделей.
Несмотря на значительный прогресс в области автоматизированного вождения, переход к полностью автономным системам сталкивается с трудностями, обусловленными сложностью реального мира. В работе ‘Toward Fully Autonomous Driving: AI, Challenges, Opportunities, and Needs’ проведен анализ текущего состояния автономного вождения, выявляющий ограничения существующих архитектур и подчеркивающий потенциал искусственного интеллекта, в частности, подходов, основанных на модульных структурах, foundation models и end-to-end обучении. Полученные результаты демонстрируют, что ключевым препятствием для достижения полной автономии является обеспечение ситуационной осведомленности и преодоление семантического разрыва. Какие инновационные решения позволят создать надежные и безопасные системы автономного вождения, способные эффективно функционировать в динамичной и непредсказуемой среде?
Осознание Ситуации: Основа Автономности
Для достижения полной автономности транспортного средства недостаточно просто реагировать на немедленные внешние раздражители. Истинная автономность требует глубокого и всестороннего понимания окружающей среды, выходящего за рамки простой идентификации объектов. Это означает способность не только «видеть» препятствия или дорожные знаки, но и интерпретировать их значение в контексте текущей ситуации, а также предвидеть возможные изменения. Автономная система должна формировать целостную картину происходящего, учитывая не только статичные элементы, но и динамическое поведение других участников дорожного движения, погодные условия и даже потенциальные непредвиденные обстоятельства. Без такого комплексного понимания окружающей действительности, транспортное средство не сможет принимать обоснованные и безопасные решения в сложных и непредсказуемых ситуациях.
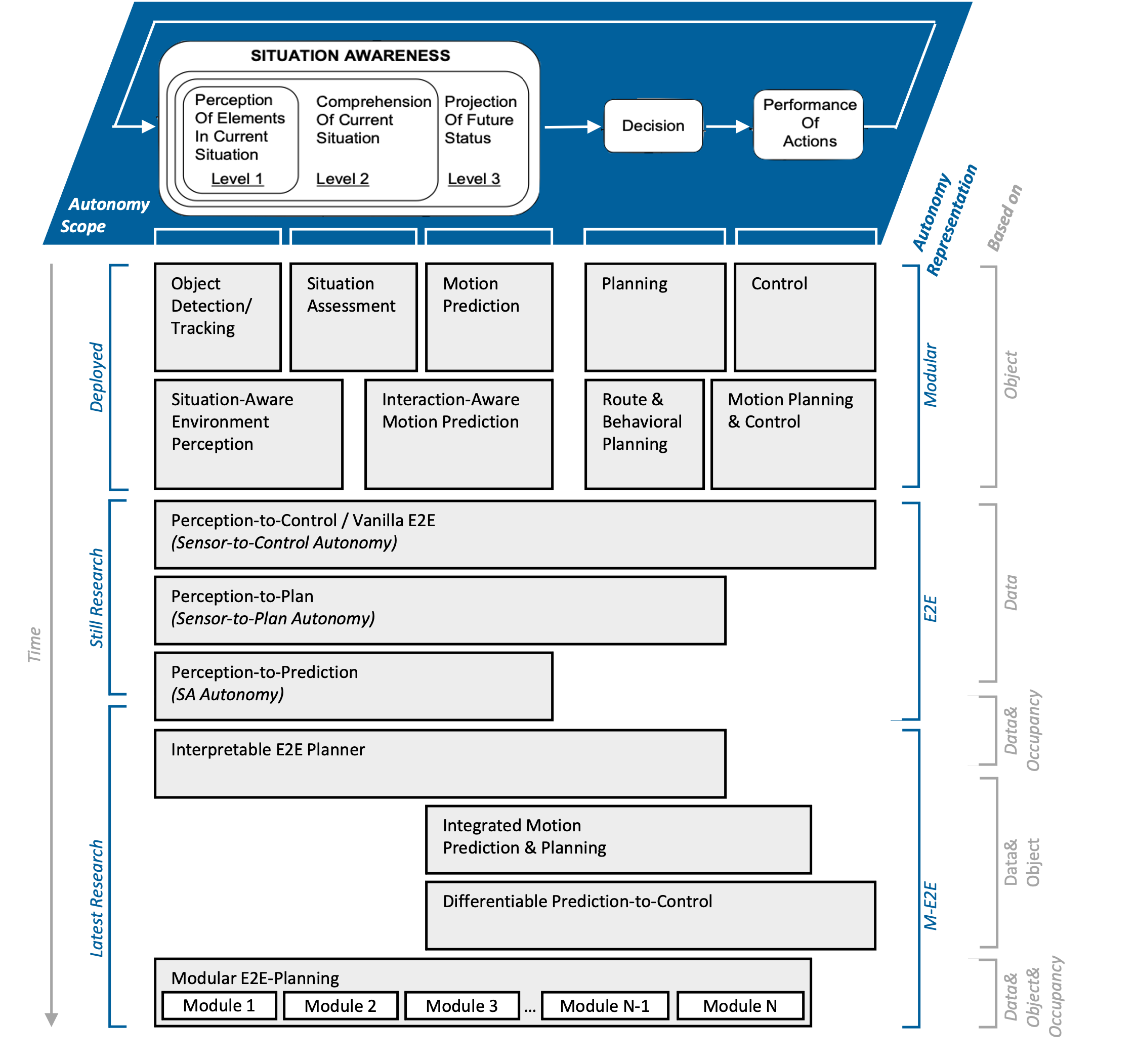
Понимание окружающей обстановки, именуемое ситуационной осведомленностью, не является единым процессом, а формируется последовательно на трех уровнях. Первичный уровень — восприятие — включает сбор данных об окружающей среде посредством сенсоров и камер, выявление отдельных объектов и их характеристик. Затем, на уровне понимания, происходит интеграция этих данных, определение взаимосвязей между объектами и интерпретация текущей ситуации. Наконец, высший уровень — прогнозирование — позволяет системе предвидеть возможное развитие событий и планировать соответствующие действия, что критически важно для безопасной и эффективной работы автономных систем в динамичной среде. Именно последовательное прохождение этих уровней обеспечивает надежное и адекватное реагирование на сложные сценарии.
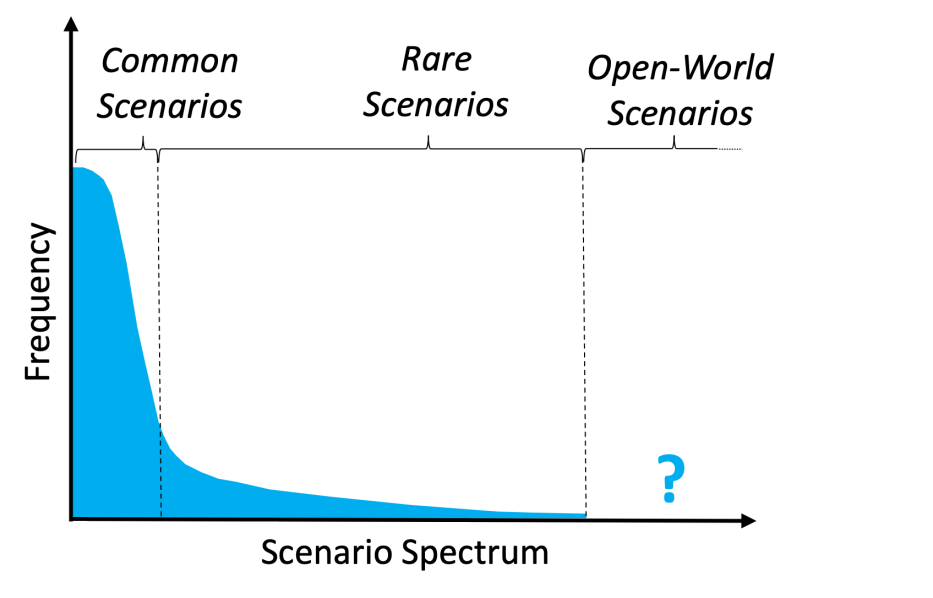
Автономные транспортные средства, лишенные надёжного ситуационного осознания, сталкиваются с серьёзными трудностями при предвидении и безопасном маневрировании в сложных дорожных ситуациях. Неспособность адекватно оценить динамично меняющуюся обстановку, включая поведение других участников движения, потенциальные препятствия и непредсказуемые события, приводит к замедленной реакции и повышенному риску аварий. Исследования показывают, что даже незначительные ошибки в оценке ситуации могут привести к критическим последствиям, особенно на высоких скоростях или в условиях плохой видимости. Поэтому разработка систем, способных к глубокому и всестороннему анализу окружающей среды, является ключевой задачей для обеспечения безопасности и надёжности автономного транспорта.
![Модель ситуационной осведомленности Эндсли, представленная в работе [85], описывает процесс принятия решений в динамичных условиях.](https://arxiv.org/html/2601.22927v1/img/SA_Model.png)
Искусственный Интеллект: Восприятие, Прогнозирование и Планирование
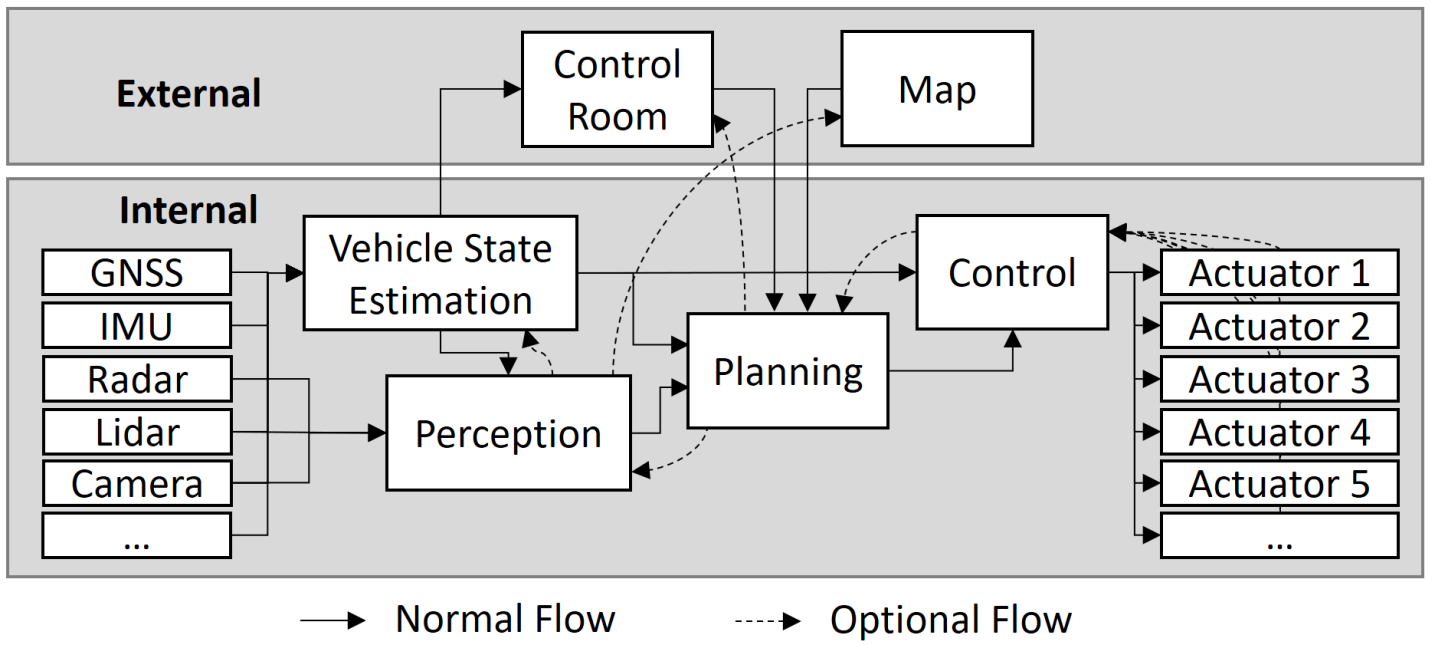
Искусственный интеллект является основой современных автономных систем, обеспечивая ключевые функции, такие как восприятие, прогнозирование и планирование. Восприятие позволяет системе обрабатывать данные от датчиков и формировать представление об окружающей среде. Прогнозирование использует эти данные для предсказания будущего состояния среды и поведения других участников движения. На основе полученной информации, модуль планирования вырабатывает оптимальную траекторию движения, обеспечивая безопасное и эффективное перемещение системы в заданных условиях. Эти функции реализуются посредством сложных алгоритмов машинного обучения и компьютерного зрения, требующих значительных вычислительных ресурсов и постоянной оптимизации.
Восприятие в контексте автономных систем обеспечивает сбор и интерпретацию данных об окружающей среде посредством различных сенсоров, таких как камеры, лидары и радары. Эта информация позволяет транспортному средству строить представление об окружающем мире, идентифицируя объекты, определяя их местоположение и классифицируя их. Параллельно с восприятием функционирует прогнозирование, которое использует данные о текущем состоянии окружения и исторические данные о поведении других участников дорожного движения и изменений в окружающей среде для предсказания их будущих траекторий и действий. Точность прогнозирования критически важна для обеспечения безопасного и эффективного функционирования автономной системы, поскольку она позволяет транспортному средству заранее реагировать на потенциальные угрозы и оптимизировать свою траекторию движения.
Процесс планирования траектории движения в автономных системах использует данные восприятия и предсказания для обеспечения безопасного и эффективного маршрута. Для упрощения разработки и масштабируемости программного обеспечения, как правило, применяется модульная архитектура. В рамках данного исследования проанализированы четыре распространенные архитектуры: Interpretable E2E (end-to-end), интегрированное предсказание движения и планирование, дифференцируемое предсказание-управление и модульное E2E планирование. Каждая из этих архитектур имеет свои преимущества и недостатки с точки зрения производительности, интерпретируемости и сложности реализации.

Обучение с Недостатком Данных: Малопримеровое и Беспримеровое Обучение
В условиях ограниченности данных для обучения моделей машинного обучения, всё большее распространение получают передовые методы обучения, такие как обучение с небольшим количеством примеров (few-shot learning) и обучение без примеров (zero-shot learning). Эти подходы позволяют моделям обобщать знания и успешно работать с новыми, ранее не встречавшимися данными, используя минимальное или полное отсутствие явных обучающих примеров для конкретной задачи. Необходимость в таких методах обусловлена высокой стоимостью и сложностью сбора и разметки больших объемов данных, особенно в специализированных областях, и стремлением к созданию более адаптивных и гибких систем искусственного интеллекта.
Методы обучения с небольшим количеством примеров (few-shot learning) и без примеров (zero-shot learning) позволяют моделям искусственного интеллекта обобщать информацию и применять знания к новым, ранее не встречавшимся ситуациям, используя минимальное или вообще отсутствие явных обучающих данных. Это достигается за счет использования предварительно обученных моделей, которые уже обладают общим пониманием данных, и механизмов, позволяющих им адаптироваться к новым задачам, опираясь на существующие знания и способности к переносу обучения. Такой подход значительно повышает адаптивность моделей и снижает потребность в больших размеченных наборах данных, что особенно важно в условиях ограниченных ресурсов или при работе с редкими категориями данных.
Основополагающие модели (Foundation Models) и мета-обучение значительно расширяют возможности обобщения при ограниченном объеме данных. Основополагающие модели предварительно обучаются на огромных массивах данных, формируя обширную базу знаний и предоставляя отправную точку для решения новых задач. Мета-обучение, в свою очередь, фокусируется на обучении модели не конкретной задаче, а алгоритму обучения — то есть способности быстро адаптироваться к новым задачам, используя лишь небольшое количество примеров. Сочетание этих подходов позволяет создавать системы, способные эффективно решать задачи, для которых отсутствует достаточное количество размеченных данных, за счет переноса знаний и улучшения способности к обучению.
Модульные Интерфейсы и Семантическое Представление
Модульные сквозные архитектуры, в сочетании с токенизированными интерфейсами, представляют собой эффективный подход к созданию надежных и гибких автономных систем. Разделение системы на независимые модули позволяет упростить разработку, тестирование и масштабирование. Токенизированные интерфейсы обеспечивают стандартизированный способ передачи данных между модулями, представляя информацию в виде дискретных единиц (токенов). Это снижает зависимость между модулями и повышает устойчивость системы к ошибкам, поскольку изменение одного модуля не требует модификации других, если контракт токенизированного интерфейса остается неизменным. Такой подход способствует повторному использованию компонентов и облегчает интеграцию новых функциональных возможностей в существующую архитектуру.
Семантическое представление в модульных системах обеспечивает обмен информацией между компонентами на основе смысла передаваемых данных, а не просто необработанных значений. Это достигается путем использования формальных представлений, описывающих значение информации, что позволяет модулям интерпретировать данные более точно и однозначно. В отличие от передачи «сырых» данных, семантическое представление снижает вероятность ошибок, связанных с неоднозначностью или неполнотой информации, и повышает общую надежность системы за счет улучшения понимания контекста и интенций при обмене данными между отдельными модулями.
В данной работе проводится сравнительный анализ различных интерфейсов, включая семантические, латентные, основанные на запросах и токенах. Латентные представления данных позволяют сжимать информацию, что способствует повышению эффективности обработки и снижению вычислительных затрат. При этом, механизмы внимания (attention mechanisms) позволяют выделять и приоритизировать наиболее релевантные данные, игнорируя менее важную информацию. Использование латентных представлений в сочетании с механизмами внимания позволяет создавать более компактные и эффективные модели, особенно при работе с большими объемами данных и сложными задачами.
Будущее Автономного Вождения: Адаптивность и Интеллект
Современные автономные транспортные средства находятся на пороге революционных изменений благодаря синергии передовых методов машинного обучения и модульной архитектуре систем. Такой подход позволяет автомобилям не просто реагировать на запрограммированные сценарии, но и адаптироваться к непредсказуемым ситуациям на дороге. Модульность обеспечивает гибкость, позволяя быстро обновлять и совершенствовать отдельные компоненты системы, в то время как сложные алгоритмы обучения, такие как глубокое обучение с подкреплением, позволяют транспортному средству самостоятельно извлекать уроки из опыта и улучшать свои навыки вождения. В результате, создаются системы, способные к более безопасному, надежному и эффективному передвижению в сложных и динамичных условиях реального мира, открывая новые горизонты для автоматизации транспорта и логистики.
Автономные транспортные средства нового поколения демонстрируют повышенную способность к адаптации в нестандартных ситуациях, что существенно повышает безопасность и надёжность их эксплуатации. В отличие от систем, запрограммированных на выполнение строго определённых сценариев, эти автомобили используют передовые алгоритмы машинного обучения для анализа окружающей обстановки и принятия решений в режиме реального времени. Это позволяет им эффективно реагировать на неожиданные препятствия, изменение погодных условий или непредсказуемое поведение других участников дорожного движения. Разработчики акцентируют внимание на создании систем, способных не просто избегать столкновений, но и прогнозировать потенциально опасные ситуации, минимизируя риски и обеспечивая более плавное и безопасное передвижение в сложных условиях. Повышенная устойчивость к непредсказуемости окружающей среды является ключевым фактором для широкого внедрения автономного транспорта и повышения доверия к данной технологии.
Развитие автономного транспорта открывает беспрецедентные возможности для трансформации ключевых секторов экономики и городской жизни. Автономные системы доставки и логистики способны оптимизировать грузоперевозки, снизить издержки и повысить эффективность цепей поставок, что особенно важно для электронной коммерции и производства. В сфере транспорта это приведет к появлению новых моделей мобильности, таких как роботакси и общественный транспорт по требованию, делая передвижение более доступным, удобным и экологичным. Городское планирование претерпит значительные изменения, поскольку потребность в парковках снизится, освобождая пространство для пешеходных зон, зеленых насаждений и других общественных пространств. В конечном итоге, эти инновации способны кардинально изменить образ жизни и организации работы, создавая более удобные, эффективные и устойчивые города будущего.
Представленное исследование акцентирует внимание на проблеме ситуационной осведомленности в контексте автономного вождения. Авторы справедливо отмечают, что существующие модульные архитектуры зачастую оказываются недостаточно эффективными для адекватного восприятия и интерпретации сложной дорожной обстановки. Данный подход к анализу перекликается с мыслями Г.Х. Харди: «Математика — это наука о том, что можно знать». Подобно тому, как математик стремится к точности и ясности в своих рассуждениях, так и разработчики систем автономного вождения должны стремиться к полному и безошибочному пониманию окружающей среды. Только тогда можно будет надеяться на создание действительно автономных транспортных средств, способных безопасно и эффективно функционировать в реальных условиях.
Что дальше?
Предложенные в статье модульные архитектуры, как и многие другие “фреймворки”, порой призваны скрыть панику перед нерешенными проблемами. Попытки разложить задачу автономного вождения на отдельные блоки — это, конечно, логично, но часто упускает из виду самое важное: целостность восприятия. Ситуационная осведомленность, оказывается, не складывается из суммы элементов, а требует некоего качественного скачка, понимания контекста, которое пока остается за пределами возможностей существующих систем.
Энтузиазм вокруг сквозного обучения и фундаментальных моделей вполне понятен. Однако, не стоит забывать, что и эти подходы не лишены ограничений. Простое увеличение объема данных и мощности вычислений — это путь, который может привести к усложнению, а не к истинному пониманию. В конечном счете, задача автономного вождения — это не столько задача машинного обучения, сколько задача создания системы, способной к адекватной интерпретации мира.
Будущее, вероятно, за системами, которые смогут интегрировать различные подходы, сочетая модульность и сквозное обучение, фундаментальные модели и здравый смысл. И, возможно, стоит перестать гнаться за “полной” автономией, осознав, что совершенство — это не когда нечего добавить, а когда нечего убрать.
Оригинал статьи: https://arxiv.org/pdf/2601.22927.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Отражения культуры: Как языковые модели рассказывают истории
- Взлом языковых моделей: эволюция атак, а не подсказок
- Укрощение Бесконечности: Алгебраические Инструменты для Кватернионов и За их Пределами
- В поисках оптимального дерева: новые горизонты GPU-вычислений
- Квантовые хроники: Последние новости в области квантовых исследований и разработки.
- Квантовый оптимизатор: Новый подход к сложным задачам
- Диффузия против Квантов: Новый Взгляд на Факторизацию
- Эволюция Симуляций: От Агентов к Сложным Социальным Системам
- Прогнозирование задержек контейнеров: Синергия ИИ и машинного обучения
- Самообучающиеся агенты: новый подход к автономным системам
2026-02-02 07:53