Автор: Денис Аветисян
Новая модель GenieDrive позволяет генерировать правдоподобные и управляемые видео дорожного движения, учитывая физику и многоканальную информацию.
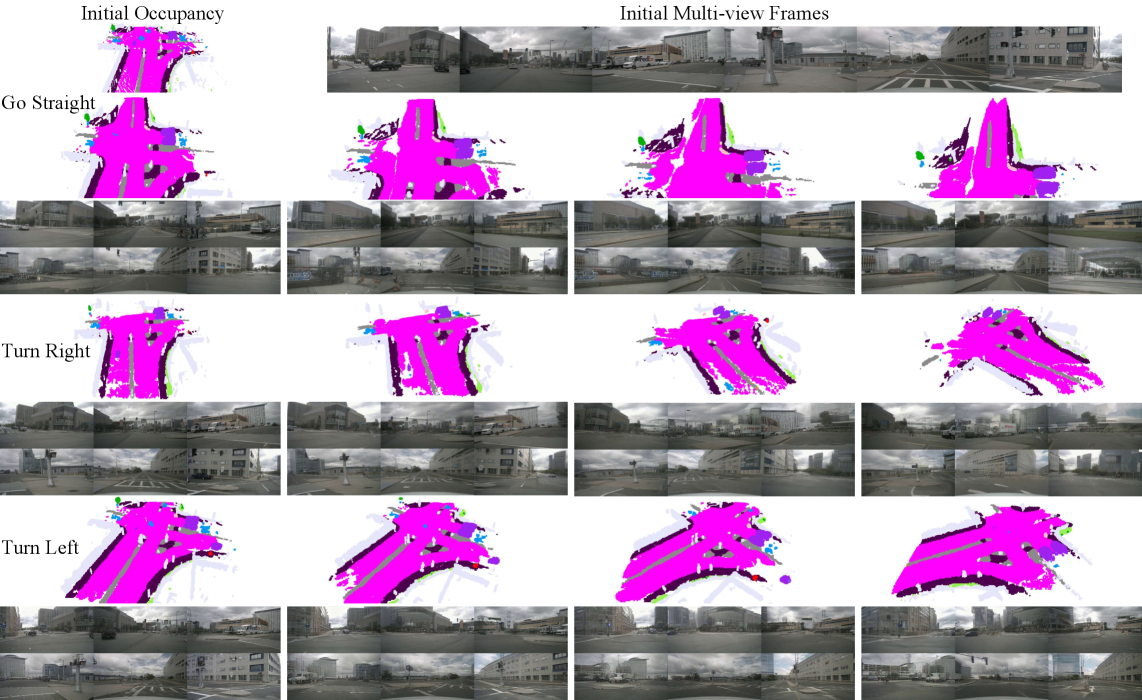
Представлена модель, использующая 4D-оккупацию в качестве промежуточного представления для создания физически корректных и согласованных видеосимуляций вождения.
Создание физически достоверных моделей поведения транспортных средств в динамичных средах остается сложной задачей, особенно в контексте прогнозирования и генерации реалистичных видео. В данной работе, ‘GenieDrive: Towards Physics-Aware Driving World Model with 4D Occupancy Guided Video Generation’, предлагается новый подход, использующий 4D-оккупацию в качестве промежуточного представления для генерации видео, обеспечивающего высокую степень контроля, согласованность с разных точек зрения и физическую правдоподобность. Предложенная архитектура GenieDrive демонстрирует улучшение точности прогнозирования и качества генерируемого видео при значительно меньшем количестве параметров. Сможет ли данный подход стать основой для создания полностью автономных и безопасных систем управления транспортными средствами в сложных городских условиях?
Прогнозирование Будущего: Вызов Автономного Вождения
Автономное вождение предъявляет уникальные требования к прогнозированию будущих состояний окружающей среды, поскольку точность этих предсказаний напрямую влияет на безопасность и эффективность транспортного средства. Неопределенность, присущая реальным дорожным условиям — поведение других участников движения, изменения погоды, неожиданные препятствия — создает значительные трудности для систем прогнозирования. В отличие от статических сценариев, в автономном вождении необходимо учитывать широкий спектр вероятностей и динамически адаптироваться к постоянно меняющейся обстановке. Игнорирование этой внутренней неопределенности может привести к ошибочным решениям и, как следствие, к аварийным ситуациям, что делает разработку надежных методов прогнозирования критически важной задачей для развития беспилотных технологий.
Традиционные подходы к прогнозированию будущего состояния транспортных средств зачастую рассматривают задачу как прямое регрессионное моделирование, что ограничивает их способность учитывать сложные физические ограничения, присущие реальному миру. Вместо моделирования динамики движения с учетом законов физики, такие методы стремятся напрямую предсказать будущую позицию и скорость, игнорируя, например, ограничения на ускорение, углы поворота или взаимодействие с другими объектами. Это приводит к нереалистичным или физически невозможным прогнозам, особенно в сложных и непредсказуемых сценариях, таких как резкое торможение или маневрирование в ограниченном пространстве. В результате, автономные системы, использующие подобные подходы, могут демонстрировать неустойчивое поведение и представлять опасность в критических ситуациях, поскольку не учитывают фундаментальные законы, управляющие движением транспортного средства. Поэтому, для повышения надежности и безопасности автономного вождения, необходимы методы, способные явно моделировать физические ограничения и учитывать динамику системы.
Ограничения в точности прогнозирования будущих состояний окружающей среды напрямую влияют на надежность и безопасность автономных транспортных средств, особенно в сложных и непредсказуемых ситуациях. Неспособность адекватно учитывать динамику движения других участников дорожного движения, пешеходов или внезапные изменения погодных условий может привести к ошибочным решениям и, как следствие, к аварийным ситуациям. В условиях непредсказуемости, когда стандартные алгоритмы сталкиваются с отклонениями от ожидаемых сценариев, системы автономного управления оказываются уязвимыми, что подчеркивает необходимость разработки более устойчивых и адаптивных методов прогнозирования, способных учитывать широкий спектр возможных событий и обеспечивать безопасное функционирование в любой обстановке.

GenieDrive: Мир, Определяемый Физикой
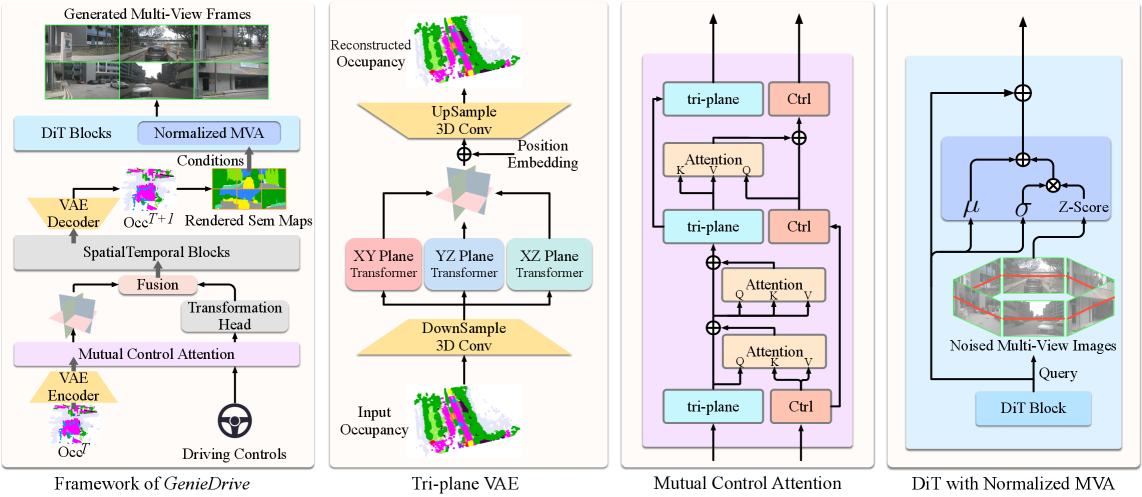
GenieDrive использует двухэтапную модель мира для автономного вождения, в которой ключевым элементом является 4D-представление занимаемого пространства. Это представление кодирует информацию о геометрии окружения и её изменениях во времени, включая статические объекты и динамические препятствия. 4D-представление состоит из трёх пространственных координат ($x, y, z$) и временной координаты ($t$), что позволяет моделировать эволюцию сцены. В отличие от традиционных подходов, оперирующих непосредственно с изображениями, GenieDrive использует 4D-занятость в качестве промежуточного представления, что повышает устойчивость к шумам и окклюзиям, а также позволяет осуществлять предсказания о будущем состоянии окружения.
Четырехмерное представление занимаемого пространства в GenieDrive выступает в роли физического ограничения и априорной информации для генерации предсказаний. Это означает, что система не генерирует сценарии, которые физически невозможны в пределах известной среды. Представление $R^4$ (x, y, z, t) кодирует информацию о том, какие области пространства заняты или свободны в каждый момент времени, что позволяет моделировать динамические объекты и их взаимодействие с окружающей средой. Использование такой априорной информации значительно повышает реалистичность и правдоподобность прогнозируемых траекторий и поведения агентов, поскольку система отдает предпочтение сценариям, соответствующим известным физическим законам и структуре окружающего пространства.
Отделение процесса предсказания от непосредственного рендеринга сцены является ключевым аспектом архитектуры GenieDrive, обеспечивающим повышенную устойчивость и возможности долгосрочного планирования. Традиционные системы часто сталкиваются с проблемами при изменении условий освещения, текстур или других визуальных характеристик, что приводит к неточным предсказаниям. GenieDrive, используя промежуточное представление мира в виде 4D-занятости, позволяет генерировать прогнозы, не зависящие от конкретных визуальных деталей. Это позволяет системе сохранять точность предсказаний даже при значительных изменениях визуального окружения и планировать траектории на более длительные периоды времени, поскольку прогнозы основаны на физически правдоподобных моделях, а не на непосредственном анализе изображения.
Эффективное Кодирование с Вариационными Автоэнкодерами
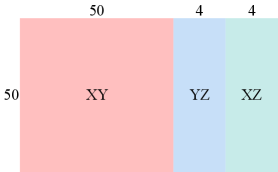
Для сжатия четырехмерного представления занятости пространства (4D occupancy) используется Tri-Plane Вариационный Автоэнкодер (VAE). Данный подход позволяет преобразовать объемные данные в компактное латентное представление, что существенно снижает вычислительную нагрузку. Tri-Plane архитектура VAE использует три ортогональных плоскости для кодирования и декодирования информации об объеме, обеспечивая эффективное сжатие и реконструкцию данных. В результате достигается уменьшение требований к памяти и вычислительным ресурсам, что критически важно для приложений, работающих в реальном времени, таких как автономное вождение, где необходимо обрабатывать большие объемы данных с минимальной задержкой.
Обучение вариационного автоэнкодера (VAE) осуществляется с использованием комбинированной функции потерь, включающей в себя Cross-Entropy Loss, KL Divergence Loss и Lovász-Softmax Loss. Cross-Entropy Loss обеспечивает точную реконструкцию входных данных, минимизируя разницу между выходными и входными распределениями. KL Divergence Loss регулирует латентное пространство, заставляя его следовать стандартному нормальному распределению, что способствует обобщающей способности модели и предотвращает переобучение. Lovász-Softmax Loss, в свою очередь, оптимизирует метрику пересечения множеств, улучшая качество сегментации и повышая точность представления объектов в латентном пространстве. Комбинация этих функций потерь позволяет добиться как высокой точности реконструкции, так и структурированного, информативного латентного пространства, необходимого для эффективного кодирования и последующего использования данных.
Эффективное кодирование, обеспечиваемое вариационным автоэнкодером, является ключевым фактором для реализации задач предсказания и планирования в режиме реального времени, критически важных для автономного вождения. Низкоразмерное латентное представление, полученное в результате сжатия данных об окружающей среде, значительно снижает вычислительную нагрузку, позволяя системам автономного управления оперативно реагировать на изменяющиеся условия. Это позволяет транспортному средству быстро оценивать вероятные траектории других участников дорожного движения, планировать оптимальный маршрут и осуществлять безопасные маневры, необходимые для эффективной навигации в сложных городских условиях. Время отклика, обеспечиваемое данным подходом, соответствует требованиям, предъявляемым к системам принятия решений в реальном времени, необходимым для обеспечения безопасности и надежности автономного вождения.
Подтверждение Эффективности и Результаты в Реальном Мире
Эффективность системы GenieDrive была тщательно подтверждена посредством количественной оценки на общепризнанном наборе данных NuScenes. Для анализа производительности применялись метрики $mIoU$ (mean Intersection over Union) и $FVD$ (Frechet Video Distance), позволяющие объективно оценить точность прогнозирования 4D-оккупации и качество генерируемых видеофрагментов вождения. Полученные результаты демонстрируют значительное улучшение по сравнению с существующими подходами, что подтверждает потенциал системы для повышения безопасности и надежности автономных транспортных средств.
Для обеспечения эффективного переноса обучения из симуляции в реальный мир, разработанная система использует CARLA — реалистичный симулятор автономного вождения — для первоначальной подготовки. Этот подход позволяет модели освоить базовые принципы вождения и восприятия окружающей среды в контролируемой среде. После завершения этапа обучения в симуляции, модель подвергается тонкой настройке на реальных данных, полученных из реальных дорожных ситуаций. Такая последовательность обучения значительно ускоряет процесс адаптации к реальным условиям, снижает потребность в огромных объемах размеченных реальных данных и повышает надежность системы автономного управления в различных сценариях.
Результаты экспериментов демонстрируют значительное повышение эффективности системы GenieDrive в задачах прогнозирования 4D-оккупации и генерации видео вождения. В частности, зафиксировано улучшение на 7.20% в метрике mIoU для прогнозирования оккупации, что свидетельствует о более точной оценке окружающего пространства. Одновременно с этим, метрика FVD для сгенерированных видео вождения снизилась на 20.7% по сравнению с существующими решениями, указывая на повышение реалистичности и качества визуализации. Важно отметить, что GenieDrive достигает передового уровня производительности, используя латентное представление, которое требует на 58% меньше параметров, чем у аналогичных систем. Это обеспечивает высокую скорость работы — 4.36 секунды на кадр — при потреблении всего 11.72 ГБ видеопамяти на одной GPU.
Достигнутые улучшения в точности прогнозирования окружения и генерации видеоданных о вождении открывают новые перспективы для создания более безопасных и надежных систем автономного управления. Повышение точности прогнозирования на 7.20% по метрике mIoU позволяет транспортному средству более эффективно предвидеть изменения в окружающей обстановке, снижая риск возникновения аварийных ситуаций. В свою очередь, снижение показателя FVD на 20.7% при генерации видеоданных обеспечивает более реалистичное и правдоподобное моделирование поведения автомобиля, что критически важно для обучения и тестирования систем автономного управления в виртуальной среде. Благодаря оптимизации модели и снижению количества параметров, GenieDrive демонстрирует высокую производительность и эффективность, позволяя реализовать передовые решения в области автономного вождения с меньшими вычислительными затратами.

Представленная работа демонстрирует стремление к созданию не просто работающей, но и доказуемо корректной модели мира для автономного вождения. Авторы, используя 4D-оккупацию в качестве промежуточного представления, стремятся к обеспечению физической согласованности генерируемых видео, что является ключевым аспектом для надежности системы. В этой связи вспоминается высказывание Дэвида Марра: «Пусть N стремится к бесконечности — что останется устойчивым?». Подобный подход, фокусирующийся на фундаментальных принципах и стремление к устойчивости, позволяет создать систему, которая не просто успешно работает в ограниченном наборе тестовых сценариев, но и способна надежно функционировать в любых, даже непредвиденных ситуациях, что особенно важно для безопасности автономного вождения.
Куда Ведет Этот Путь?
Представленная работа, несомненно, демонстрирует элегантность промежуточного представления в виде 4D-оккупации для генерации видео вождения. Однако, не стоит обманываться кажущейся полнотой картины. Создание «физически осознанных» видео — это лишь приближение к истинному моделированию реальности. Неизбежно возникают вопросы о точности моделирования сложных взаимодействий, особенно в непредсказуемых сценариях, где эвристики, пусть и замаскированные под «осознанность», неизбежно берут верх над строгой дедукцией.
Будущие исследования, вероятно, столкнутся с необходимостью формализации критериев «физической правдоподобности». Простая визуальная консистентность — недостаточный показатель. Необходимо разработать метрики, позволяющие количественно оценивать соответствие с законами физики, а не просто имитировать их последствия. Иначе, мы рискуем создать иллюзию интеллекта, основанную на ловких трюках, а не на фундаментальном понимании.
Перспективы кажутся многообещающими, но стоит помнить, что любое моделирование — это упрощение. Истинная задача заключается не в создании все более сложных моделей, а в четком осознании границ их применимости. Необходимо стремиться к математической строгости, а не к впечатляющим, но непроверяемым результатам. В конечном счете, красота алгоритма заключается не в его способности «работать», а в его доказуемой корректности.
Оригинал статьи: https://arxiv.org/pdf/2512.12751.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Отражения культуры: Как языковые модели рассказывают истории
- Квантовые Заметки: Прогресс и Парадоксы
- Звуковая фабрика: искусственный интеллект, создающий музыку и речь
- Квантовый оптимизатор: Новый подход к сложным задачам
- Квантовые симуляторы: точное вычисление энергии основного состояния
- Квантовый взгляд на рак груди: новая точность диагностики
- 💸 Великобритания тратит 500 миллионов фунтов стерлингов на квантовые технологии – может быть, кот Шрёдингера только что разбогател?
- Кванты в Финансах: Не Шутка!
- Прогнозирование задержек контейнеров: Синергия ИИ и машинного обучения
- Взлом языковых моделей: эволюция атак, а не подсказок
2025-12-16 18:37