Автор: Денис Аветисян
Новая разработка позволяет генерировать правдоподобные внутренние пространства из текстовых описаний, открывая возможности для обучения и тестирования роботов в виртуальной реальности.
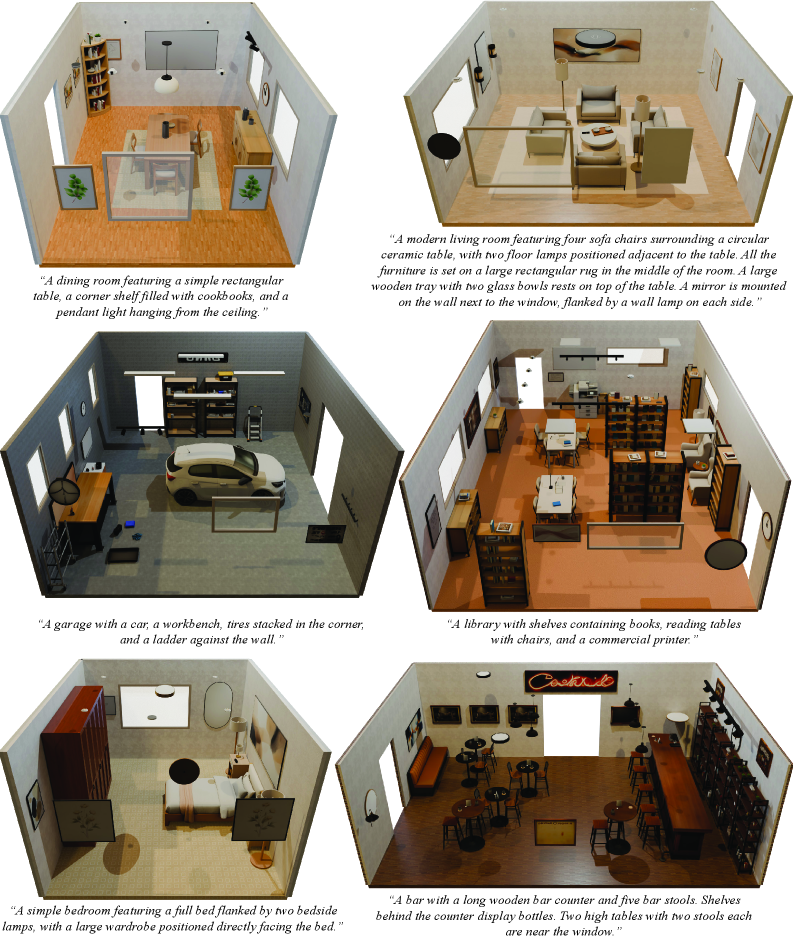
Представлена иерархическая система SceneSmith, использующая агентов искусственного интеллекта для создания физически корректных и пригодных для симуляций 3D-сцен.
Несмотря на возрастающую роль симуляций в обучении и оценке роботов-помощников, существующие среды часто не отражают разнообразие и физическую сложность реальных помещений. В работе под названием ‘SceneSmith: Agentic Generation of Simulation-Ready Indoor Scenes’ представлен иерархический агентный фреймворк, генерирующий реалистичные и пригодные для симуляции интерьеры по текстовым запросам. Разработанная система обеспечивает создание сцен с в 3-6 раз большим количеством объектов, чем предыдущие методы, сохраняя при этом высокую стабильность и минимизируя коллизии. Может ли подобный подход кардинально улучшить процесс разработки и тестирования робототехнических систем, приблизив их к эффективной работе в реальных условиях?
Предчувствие Симуляции: Потребность в Реалистичных Средах
Современные исследования в области робототехники и искусственного интеллекта всё чаще используют симулированные среды для обучения, что обусловлено потребностью в безопасном и эффективном процессе. Вместо дорогостоящих и потенциально опасных экспериментов с реальными роботами и алгоритмами, разработчики прибегают к виртуальным мирам, позволяющим многократно повторять сценарии, тестировать различные стратегии и быстро адаптировать системы к меняющимся условиям. Такой подход значительно ускоряет процесс обучения, снижает риски повреждения оборудования и позволяет исследовать ситуации, которые сложно или невозможно воспроизвести в реальном мире. Благодаря симуляции, алгоритмы могут «накапливать опыт» в контролируемой среде, прежде чем быть развёрнутыми в реальных задачах, что повышает их надёжность и эффективность.
Создание высокоточных и физически достоверных внутренних сред представляет собой сложную задачу, требующую баланса между визуальным реализмом и вычислительной эффективностью. Достижение правдоподобного освещения, текстур и взаимодействия объектов требует значительных ресурсов, в то время как необходимость в быстрой симуляции для обучения роботов и систем искусственного интеллекта диктует необходимость оптимизации. Ученые сталкиваются с проблемой моделирования сложных физических явлений, таких как отражение света, динамика жидкостей и деформация твердых тел, не жертвуя при этом скоростью симуляции. Разработка алгоритмов, способных генерировать детализированные среды, которые одновременно выглядят реалистично и работают быстро, является ключевым направлением исследований в области робототехники и компьютерного зрения.
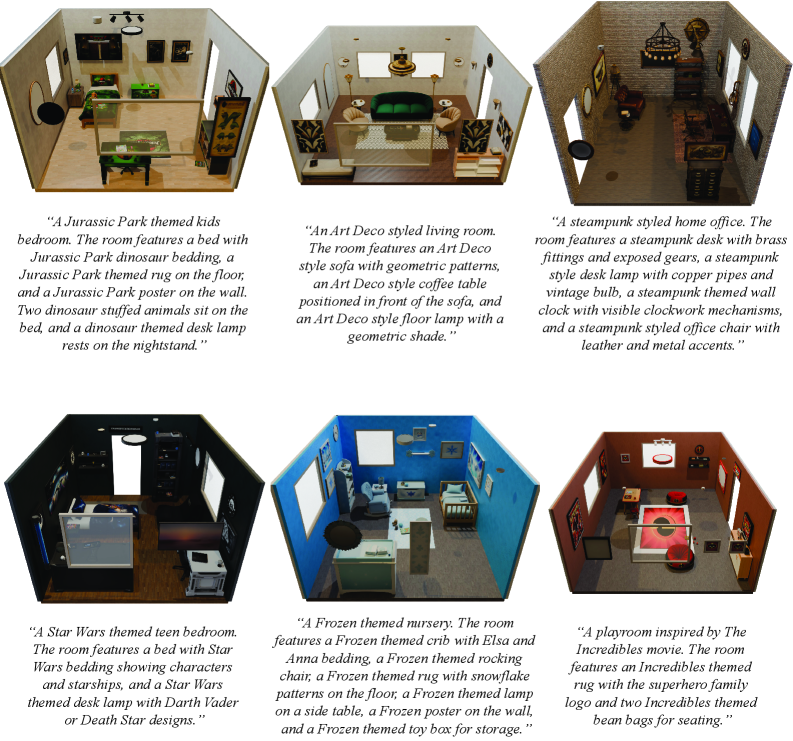
Современные методы генерации виртуальных сред для обучения роботов и систем искусственного интеллекта часто сталкиваются с трудностями при создании достаточно разнообразных и сложных сцен. Существующие подходы нередко ограничены в способности воспроизводить реалистичные вариации в планировке помещений, освещении, текстурах и расположении объектов. Это приводит к тому, что обученные агенты могут демонстрировать низкую адаптивность и хрупкость при столкновении с незнакомыми или непредсказуемыми условиями в реальном мире. Недостаток разнообразия в тренировочных данных ограничивает способность агентов обобщать полученные знания и эффективно функционировать в динамичных и непредсказуемых средах, что подчеркивает необходимость разработки более совершенных алгоритмов и инструментов для автоматизированной генерации виртуальных пространств.
Для успешного внедрения робототехнических и интеллектуальных систем, критически важна так называемая «симуляционная готовность» окружающей среды. Это означает, что виртуальное пространство должно быть спроектировано не просто реалистично с визуальной точки зрения, но и идеально соответствовать требованиям физических движков. Иначе говоря, геометрия объектов, их физические свойства — масса, трение, упругость — должны быть точно заданы, чтобы симуляция максимально правдоподобно отражала поведение реального мира. Несоответствие между виртуальной и реальной физикой приводит к ошибкам в обучении агентов, снижению надежности систем и затрудняет их последующую адаптацию к реальным условиям. Поэтому, при создании симуляционных сред, особое внимание уделяется обеспечению их совместимости с используемыми физическими движками и точности моделирования физических взаимодействий.
Текст в Пространство: Восхождение AI-Генерируемых Сцен
Недавние достижения в области искусственного интеллекта позволяют создавать трехмерные модели интерьеров непосредственно из текстовых описаний, используя технологию “Text-to-3D Synthesis”. Данный подход подразумевает, что на основе заданного текстового запроса, описывающего помещение и его содержимое, алгоритмы автоматически генерируют соответствующую 3D-модель. Это достигается за счет использования нейронных сетей, обученных на больших объемах данных, содержащих текстовые описания и соответствующие им трехмерные сцены. Технология позволяет создавать виртуальные пространства различной сложности, от простых комнат до детализированных интерьеров, без необходимости ручного моделирования.
Методы, такие как ‘LayoutVLM’, ‘Holodeck’ и ‘I-Design’, позволяют создавать пространственные планы и расстановку объектов непосредственно на основе текстовых описаний. ‘LayoutVLM’ использует большие языковые модели для интерпретации текста и генерации планировки помещения, определяя расположение стен, дверей и других архитектурных элементов. ‘Holodeck’ фокусируется на генерации реалистичных 3D-сцен, используя текстовые подсказки для определения типов и расположения объектов мебели и декора. ‘I-Design’ предлагает подход, основанный на изображениях и текстах, позволяя пользователям задавать как визуальные, так и текстовые параметры для формирования желаемого интерьера. Все три метода используют различные алгоритмы и архитектуры нейронных сетей, но объединяет их способность преобразовывать лингвистическую информацию в структурированные 3D-сцены.
На данный момент, существующие методы генерации 3D-сцен из текстовых описаний, такие как LayoutVLM, Holodeck и I-Design, зачастую функционируют как отдельные, изолированные решения. Отсутствует единая, унифицированная платформа или фреймворк, который бы объединил эти инструменты и обеспечил комплексный процесс создания сцен. Это приводит к фрагментации рабочего процесса, усложняет интеграцию различных этапов генерации и затрудняет достижение согласованности и целостности в итоговой 3D-модели. Каждый инструмент, как правило, ориентирован на решение конкретной подзадачи — планировка, размещение объектов или текстурирование — и не предусматривает бесшовной передачи данных между ними.
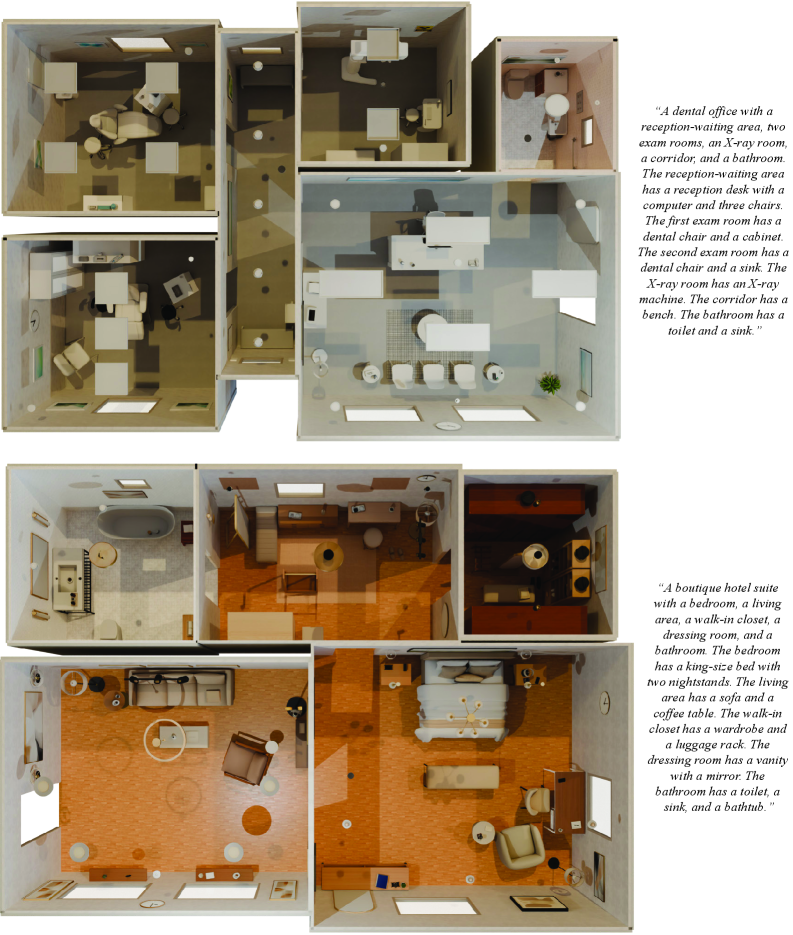
Иерархический подход к генерации сцен, начинающийся с формирования планировки и последующего заполнения объектами, обеспечивает более структурированный и контролируемый процесс. Данный метод предполагает последовательное создание сцены: сначала определяется общая пространственная организация, включая расположение основных элементов и зон, а затем происходит заполнение этой планировки конкретными объектами и деталями. Такой подход позволяет более эффективно управлять сложностью сцены, упрощает внесение изменений и обеспечивает большую согласованность между отдельными элементами, в отличие от одновременной генерации всех аспектов сцены. Это особенно важно при создании сложных и детализированных виртуальных окружений, где необходимо обеспечить реалистичность и логическую связность всех элементов.

SceneSmith: Агентный Фреймворк для Комплексной Генерации Сцен
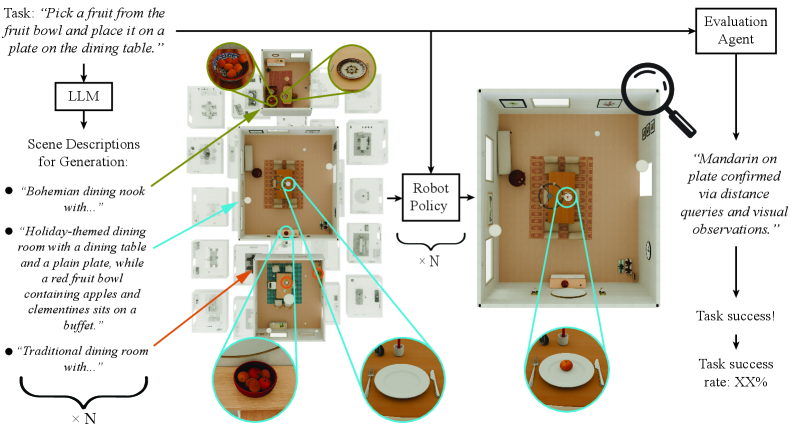
Архитектура SceneSmith использует иерархический агентный подход к генерации сцен, состоящий из трех ключевых агентов: дизайнера, критика и оркестратора. Дизайнер отвечает за первоначальное создание сцены на основе входного запроса. Критик оценивает реалистичность и соответствие сгенерированной сцены запросу, предоставляя обратную связь. Оркестратор управляет итеративным процессом, координируя работу дизайнера и критика для последовательного улучшения сцены до достижения заданных критериев качества. Взаимодействие между этими агентами позволяет SceneSmith генерировать сложные и правдоподобные сцены, учитывая как эстетические, так и физические свойства объектов.
В основе SceneSmith лежит агентный подход к генерации реалистичных интерьеров, пригодных для использования в симуляциях. Данная архитектура использует несколько специализированных агентов, взаимодействующих между собой для итеративного улучшения сцены. Этот подход позволяет эффективно управлять сложностью процесса генерации, автоматически учитывая физические свойства объектов и геометрию столкновений для обеспечения правдоподобия и стабильности симуляции. Использование агентного ИИ позволяет SceneSmith создавать значительно более детализированные сцены (в 3-6 раз больше объектов), при этом поддерживая крайне низкий уровень столкновений между объектами (<2%) и высокую стабильность объектов в физической симуляции (95.6%), что существенно превосходит показатели базовых методов.
В рамках генерации сцен, SceneSmith уделяет особое внимание учету физических свойств объектов и их геометрии столкновений. Это позволяет создавать виртуальные среды, пригодные для использования в робототехнике и симуляциях. В отличие от базовых методов, где уровень стабильности объектов под воздействием физики составляет от 8% до 61%, SceneSmith обеспечивает стабильность 95.6% объектов. Кроме того, система поддерживает крайне низкий уровень коллизий между объектами — менее 2%, в то время как у базовых решений этот показатель варьируется от 3% до 29%. Такой подход гарантирует физическую правдоподобность генерируемых сцен и их пригодность для интерактивных приложений и тестирования роботизированных систем.
В ходе оценки производительности, разработанная система SceneSmith демонстрирует превосходство над базовыми методами генерации сцен, достигая средней доли побед в 92.2% по реалистичности и 91.5% по соответствию исходным запросам. Кроме того, SceneSmith генерирует в 3-6 раз больше объектов в сцене, при этом поддерживая крайне низкий уровень межобъектных столкновений — менее 2% (в сравнении с 3-29% для базовых методов). Важно отметить, что 95.6% объектов, сгенерированных SceneSmith, сохраняют стабильность при физическом моделировании, что значительно выше, чем у базовых методов, где данный показатель колеблется от 8 до 61%.
Карта Генерации Сцен: Обзор Подходов и Техник
Помимо подходов, основанных на использовании автономных агентов, генерация реалистичных внутренних пространств активно ведется с использованием двух других ключевых методик: моделей, управляемых данными, и процедурных методов. Модели, управляемые данными, опираются на анализ существующих наборов данных интерьеров для обучения и последующего создания новых сцен, имитирующих изученные паттерны. В свою очередь, процедурные методы полагаются на наборы правил и алгоритмов, определяющих размещение объектов и геометрию пространства. Оба подхода обладают своими преимуществами и недостатками, но в совокупности представляют собой мощный инструментарий для автоматизированного создания разнообразных и сложных виртуальных сред, позволяя исследователям и разработчикам эффективно решать задачи моделирования и симуляции.
Иерархический подход, реализованный в методе HSM, демонстрирует значительный потенциал использования существующих данных для генерации реалистичных интерьеров. Вместо создания сцен с нуля, HSM опирается на предварительно изученные «мотивы» — повторяющиеся элементы и структуры, встречающиеся в реальных помещениях. Эти мотивы, полученные в результате анализа больших объемов данных о планировках и дизайне интерьеров, формируют основу для иерархического построения сцены. На верхнем уровне происходит выбор глобальной планировки, а затем, на последующих уровнях, заполняются детали, используя изученные мотивы. Такой подход позволяет не только значительно ускорить процесс генерации, но и повысить правдоподобность создаваемых сред, поскольку они базируются на реальных примерах и отражают закономерности, свойственные человеческому дизайну.
Система SceneWeaver представляет собой инновационный подход к генерации виртуальных сред, основанный на использовании единственного агента для последовательного улучшения создаваемой сцены. В отличие от более сложных систем, требующих координации множества агентов, SceneWeaver демонстрирует, что эффективное построение реалистичных интерьеров возможно и с использованием упрощенной архитектуры. Агент, управляемый принципами итеративного уточнения, постепенно детализирует сцену, добавляя объекты и корректируя их расположение на основе заданных критериев. Такой подход не только снижает вычислительную сложность, но и обеспечивает более предсказуемый и контролируемый процесс генерации, открывая возможности для создания разнообразных и детализированных симуляционных сред с меньшими затратами ресурсов.
Сочетание различных подходов к генерации сцен — от моделей, основанных на данных, до процедурных методов и агентных систем, таких как HSM и SceneWeaver — формирует надежный инструментарий для создания разнообразных и реалистичных симуляционных сред. Данный комплексный подход позволяет преодолеть ограничения, присущие каждому отдельному методу, обеспечивая генерацию окружений, варьирующихся по сложности, стилю и функциональности. В результате, исследователи и разработчики получают возможность создавать виртуальные пространства, адаптированные под конкретные задачи — от обучения роботов и тестирования алгоритмов до разработки игр и визуализации архитектурных проектов. Такая гибкость и универсальность делают комбинированные подходы ключевым элементом в развитии симуляционных технологий и расширении возможностей виртуального моделирования.
Исследование, представленное в данной работе, демонстрирует, что создание реалистичных симуляционных сред — это не просто техническая задача, а скорее процесс, требующий понимания взаимодействия множества факторов. Авторы предлагают иерархический агентный подход, позволяющий генерировать сцены, учитывающие физическую реализуемость и логическую согласованность. Это напоминает о словах Грейс Хоппер: «Лучший способ предсказать будущее — это создать его». Действительно, SceneSmith не просто моделирует интерьеры, а активно формирует основу для будущего развития робототехники, создавая предсказуемую и контролируемую среду для обучения и оценки агентов. Вместо того чтобы полагаться на случайность или упрощенные модели, система стремится к созданию среды, которая отражает сложность реального мира, тем самым повышая надежность и эффективность робототехнических систем.
Что дальше?
Представленная работа, несомненно, расширяет границы автоматизированного создания виртуальных сред. Однако, следует помнить: система, способная безупречно воссоздать интерьер по текстовому описанию, — это система, лишенная права на ошибку, а значит, и на эволюцию. Идеальная симуляция не нуждается в тех, кто в ней обучается; она сама — завершённый артефакт. Истинный прогресс лежит не в достижении фотореализма, а в создании сред, которые намеренно несовершенны, полны скрытых аномалий и непредсказуемых взаимодействий.
Полагаться исключительно на языковые модели для генерации физически правдоподобных пространств — значит игнорировать фундаментальную неопределенность реального мира. Вместо стремления к абсолютно точным копиям, следует исследовать возможности создания “диких” симуляций, где законы физики не абсолютны, а вероятностны. Именно в таких средах роботы смогут по-настоящему учиться адаптации и импровизации, а не просто выполнять заранее запрограммированные действия.
В конечном счете, будущее роботизированных симуляций заключается не в создании совершенных виртуальных миров, а в создании сред, которые намеренно провоцируют сбои, заставляя системы учиться на своих ошибках. Система, которая никогда не ломается, мертва; система, которая постоянно адаптируется к новым поломкам, — жива.
Оригинал статьи: https://arxiv.org/pdf/2602.09153.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Внимание в сети: Новый подход к ускорению больших языковых моделей
- Внимание на границе: почему трансформеры нуждаются в «поглотителях»
- Химический синтез под контролем искусственного интеллекта: новые горизонты
- Искусственный нос будущего: как квантовая механика и машинное обучение распознают запахи
- S-Chain: Когда «цепочка рассуждений» в медицине ведёт к техдолгу.
- Язык тела под присмотром ИИ: архитектура и гарантии
- Квантовый дозор: Новая система обнаружения аномалий для умных сетей
- Видео-Мыслитель: гармония разума и визуального потока.
- Генетическая приоритизация: новый взгляд на отбор генов
- Наука, управляемая интеллектом: новая эра открытий
2026-02-12 03:36