Автор: Денис Аветисян
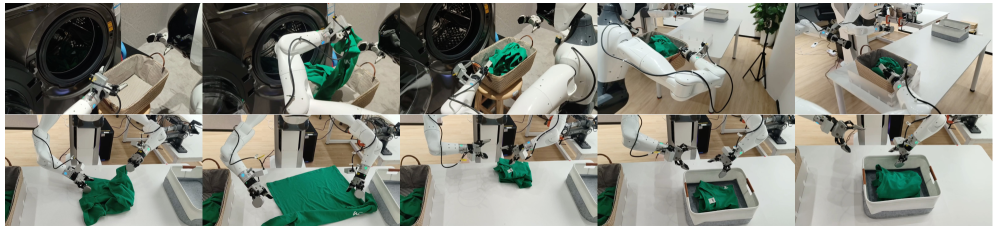
Ученые представили GigaBrain-0.5M*, систему, позволяющую роботам учиться сложным задачам манипулирования объектами благодаря интеграции визуального восприятия, языка и обучения с подкреплением.
Модель GigaBrain-0.5M* использует обучение с подкреплением на основе мировых моделей (RAMP) для повышения эффективности и планирования действий в задачах робототехники.
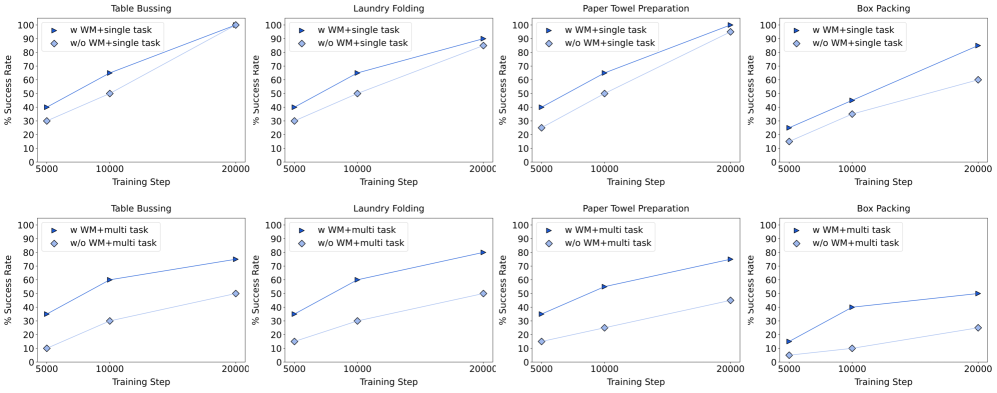
Ограниченные возможности понимания сцены и прогнозирования будущего препятствуют развитию моделей «зрение-язык-действие», напрямую предсказывающих последовательности действий. В данной работе представлена модель GigaBrain-0.5M^<i>, разработанная в рамках исследования ‘GigaBrain-0.5M: a VLA That Learns From World Model-Based Reinforcement Learning, использующая обучение с подкреплением на основе мировых моделей для повышения эффективности. Интеграция алгоритма RAMP (Reinforcement leArning via world Model-conditioned Policy) позволила добиться существенного прироста производительности в задачах манипулирования роботом, демонстрируя улучшение примерно на 30% в таких сложных сценариях, как складывание белья и упаковка коробок. Способна ли данная архитектура обеспечить надежное выполнение долгосрочных задач и открыть новые горизонты для автономной робототехники?
Ключ к Воплощенному Интеллекту: Преодоление Разрыва между Восприятием и Действием
Современная робототехника предъявляет всё более высокие требования к системам, способным объединять зрительное восприятие, лингвистические команды и физические действия в единое целое. Традиционные подходы, как правило, оказываются неэффективными при решении этой комплексной задачи, поскольку они часто рассматривают эти аспекты по отдельности. Создание моделей, способных не просто распознавать объекты и понимать инструкции, но и преобразовывать эту информацию в последовательность скоординированных движений в реальном времени, представляет собой серьезный вызов для исследователей. Преодоление этого препятствия необходимо для разработки действительно интеллектуальных роботов, способных автономно функционировать в сложных и непредсказуемых условиях окружающей среды, и эффективно взаимодействовать с миром.
Существующие методы, несмотря на значительные успехи в области робототехники, часто демонстрируют ограниченные возможности при работе со сложными, реальными сценариями. Проблема заключается в недостаточной обобщающей способности моделей — они хорошо функционируют в контролируемой лабораторной среде, но испытывают трудности при столкновении с непредсказуемыми изменениями в окружающей среде или новыми, ранее не встречавшимися ситуациями. Особенно остро проявляется эта проблема при планировании действий на длительный период времени — так называемом “долгосрочном планировании”, где робот должен учитывать множество факторов и предвидеть последствия своих действий на несколько шагов вперёд. Неспособность к надежной экстраполяции знаний и адаптации к новым условиям существенно ограничивает применение роботов в широком спектре практических задач, требующих гибкости и автономности.
Для создания действительно интеллектуальных роботизированных систем крайне важна унифицированная платформа, способная воспринимать и адекватно реагировать на тонкие изменения окружающей среды. Традиционные подходы часто оказываются неэффективными в сложных, непредсказуемых условиях реального мира, где робот должен интерпретировать не только прямые визуальные сигналы, но и контекстуальные подсказки, неявные намерения и потенциальные угрозы. Разработка такой платформы требует интеграции передовых методов компьютерного зрения, обработки естественного языка и планирования действий, позволяющих роботу не просто распознавать объекты, но и понимать их взаимосвязи, предвидеть последствия своих действий и адаптироваться к изменяющейся обстановке. Способность к нюансированному восприятию и адекватной реакции является ключевым фактором, определяющим эффективность и надежность робота в реальных приложениях, от автономной навигации до взаимодействия с людьми.
GigaBrain: Фундамент Воплощенного Интеллекта
GigaBrain-0.5 закладывает прочную основу для развития воплощенного интеллекта посредством предварительного обучения модели «Зрение-Язык-Действие» на более чем 10 000 часах роботизированных данных. Этот объем данных позволяет модели обобщать знания и эффективно применять их к широкому спектру задач, не требуя дополнительной тонкой настройки для каждого конкретного сценария. Предварительное обучение на столь масштабном наборе данных существенно повышает способность модели адаптироваться к новым, ранее не встречавшимся ситуациям и выполнять сложные манипуляции в различных средах.
В основе GigaBrain лежит архитектура, использующая модель PaliGemma-2 для обработки визуальной и лингвистической информации. PaliGemma-2 выступает в роли энкодера, преобразующего входные данные в векторное представление, необходимое для последующего этапа. Для предсказания действий используется Diffusion Transformer, который генерирует последовательность действий на основе закодированного представления. Этот подход позволяет модели не только понимать поступающие визуальные и текстовые инструкции, но и предсказывать оптимальные действия для их выполнения в физическом мире, используя вероятностное моделирование последовательностей, характерное для Diffusion Transformers.
Механизм “Воплощенного размышления в цепочке” (Embodied Chain-of-Thought reasoning) в GigaBrain позволяет модели генерировать разнообразные и контекстуально уместные действия путем последовательного рассуждения о текущей ситуации и планирования последующих шагов. В отличие от традиционных подходов, этот метод интегрирует перцептивные данные (визуальные и лингвистические) с информацией о предыдущих действиях и их результатах, формируя внутреннюю “цепочку рассуждений”. Это позволяет модели не только предсказывать наиболее вероятное действие, но и обосновывать его, учитывая контекст и долгосрочные цели, что значительно повышает надежность и адаптивность в различных сценариях взаимодействия с окружающей средой.

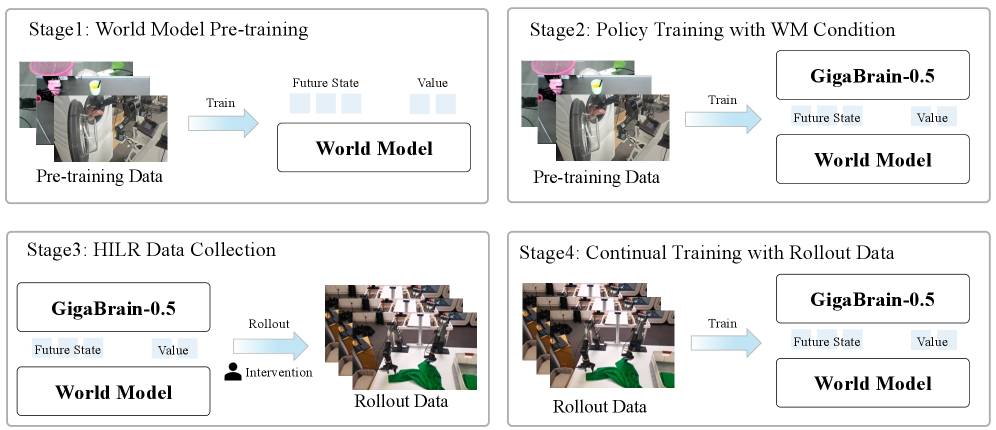
RAMP: Обучение с Подкреплением на Основе Модели Мира
GigaBrain-0.5M* демонстрирует повышенную эффективность благодаря интеграции обучения с подкреплением, основанного на использовании модели мира, посредством методологии RAMP. Данный подход позволяет значительно улучшить производительность за счет прогнозирования будущих состояний и значений, что особенно важно в задачах, требующих долгосрочного планирования. В рамках RAMP модель мира используется для генерации прогнозов, которые затем применяются для улучшения политики обучения с подкреплением, направляя процесс исследования и оптимизации. Эффективность прогнозирования ценностей, обеспечиваемая моделью мира, подтверждается высоким коэффициентом корреляции Кендалла τ равным 0.8018.
Методология RAMP использует обученную Мировую Модель для предсказания будущих состояний и оценок, демонстрируя коэффициент корреляции Кендалла τ равный 0.8018 для предсказания ценностей. Это указывает на высокую степень соответствия между предсказанными и фактическими значениями, что позволяет агенту более точно оценивать долгосрочные последствия своих действий и планировать оптимальную стратегию поведения. Точность предсказаний Мировой Модели напрямую влияет на эффективность обучения с подкреплением, позволяя агенту эффективно исследовать пространство состояний и избегать неоптимальных действий.
Методология RAMP обеспечивает планирование на длительный горизонт и эффективное исследование среды путем обусловленности политики предсказаниями, полученными из обученной Мировой Модели. Обусловленность политики позволяет учитывать предполагаемые будущие состояния и соответствующие значения, что оптимизирует процесс принятия решений. В качестве руководства используется функция преимущества A(s,a) = Q(s,a) - V(s), которая оценивает относительную полезность действия a в состоянии s по сравнению со средней полезностью в этом состоянии, способствуя выбору действий, которые, как ожидается, приведут к наилучшим результатам в долгосрочной перспективе.
Практическая Валидация и Сравнение: Реальные Результаты
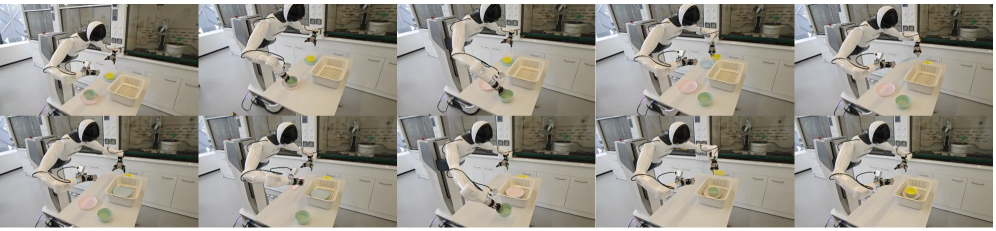
Система GigaBrain-0.5M подверглась тщательной проверке на платформе RoboChallenge — признанном эталоне для оценки воплощенного искусственного интеллекта, работающего непосредственно с реальными роботами. Данный бенчмарк предполагает решение сложных задач, требующих от робота адаптации к физическому миру и взаимодействия с ним. Проведение испытаний именно в реальных условиях, а не в симуляции, позволяет достоверно оценить практическую применимость и надежность системы GigaBrain-0.5M, выявляя потенциальные проблемы, связанные с шумами, неточностями сенсоров и другими факторами, характерными для реальной среды. Rigorous оценка на RoboChallenge является ключевым этапом в подтверждении эффективности и зрелости разработанного подхода к воплощенному искусственному интеллекту.
Система GigaBrain-0.5M продемонстрировала превосходные результаты в ходе испытаний на RoboChallenge — эталонной платформе для оценки воплощенного искусственного интеллекта на реальных роботах. В ходе соревнований система значительно превзошла существующие алгоритмы обучения с подкреплением, работающие в режиме офлайн, такие как AWR и RECAP. Средний показатель успешного выполнения заданий на RoboChallenge составил 51.67%, что позволило GigaBrain-0.5M занять лидирующую позицию в рейтинговой таблице. Данный результат свидетельствует о высокой эффективности системы в решении сложных задач манипулирования и планирования действий в реальном мире, и подтверждает её потенциал для широкого спектра применений в робототехнике.
В ходе тестирования GigaBrain-0.5M продемонстрировал заметное превосходство над базовым алгоритмом RECAP в решении практических задач. В частности, при упаковке предметов в коробки система достигла примерно на 30% более высокого уровня успешности. Помимо этого, значительное улучшение наблюдалось и в процессе приготовления эспрессо, что подтверждает способность GigaBrain-0.5M эффективно адаптироваться к различным манипуляциям и выполнять сложные действия с высокой точностью. Полученные результаты свидетельствуют о перспективности использования данной системы в задачах автоматизации и робототехнике, требующих надежности и высокой производительности.
К Автономным Агентам: Будущее Воплощенного Искусственного Интеллекта
Разработка GigaBrain-0.5M знаменует собой важный прорыв в создании по-настоящему автономных агентов, способных функционировать в сложных, реальных условиях. Эта система демонстрирует способность к эффективному обучению с подкреплением и построению детализированной «мировой модели», позволяющей прогнозировать последствия действий и планировать долгосрочные стратегии. В отличие от предыдущих моделей, GigaBrain-0.5M демонстрирует повышенную устойчивость к шумам и изменениям в окружающей среде, что критически важно для работы в непредсказуемых сценариях. Достигнутые результаты открывают перспективы для широкого спектра применений, от автоматизации логистики и управления робототехникой до разработки интеллектуальных систем помощи и взаимодействия с человеком.
В дальнейшем исследования сосредоточены на повышении устойчивости и обобщающей способности Мировой Модели, являющейся ключевым компонентом системы. Ученые стремятся к созданию алгоритмов обучения с подкреплением, которые будут не только более эффективными, но и масштабируемыми для работы с возрастающими объемами данных и сложностью задач. Разработка таких алгоритмов позволит агентам адаптироваться к новым, ранее не встречавшимся ситуациям, и эффективно действовать в динамично меняющейся среде, что является необходимым условием для создания действительно автономных систем искусственного интеллекта, способных к полноценному взаимодействию с реальным миром.
В конечном итоге, исследования направлены на создание роботов, способных не просто функционировать в окружающей среде, но и взаимодействовать с ней естественно и эффективно. Предполагается, что такие устройства смогут не только адаптироваться к изменяющимся условиям, но и понимать намерения людей, предвосхищая их потребности и действуя в соответствии с ними. Подобные разработки открывают широкие перспективы для применения в различных сферах — от помощи по дому и ухода за пожилыми людьми до участия в спасательных операциях и автоматизации производства, что позволит значительно повысить качество жизни и оптимизировать многие процессы.
Исследование демонстрирует, что истинная эффективность в сложных задачах манипулирования роботами достигается не за счет грубой силы вычислений, а благодаря элегантной математической модели мира. Авторы, представляя GigaBrain-0.5M*, подчеркивают важность проспективного планирования и повышения эффективности обучения с подкреплением за счет использования мировых моделей. Как отмечал Ян Лекун: «Машинное обучение — это математика, и математика должна быть чистой». Эта фраза отражает суть представленной работы: корректность и доказуемость алгоритма, основанного на принципах обучения с подкреплением через мировые модели, гарантируют надежность и предсказуемость поведения робота в долгосрочной перспективе. Ведь только математическая дисциплина способна упорядочить хаос данных и обеспечить стабильный результат.
Что дальше?
Представленная работа, несомненно, демонстрирует прогресс в области обучения роботов сложным манипуляциям. Однако, необходимо помнить, что элегантность решения не определяется количеством успешно пройденных тестов, а его математической доказуемостью. Создание модели мира, пусть и эффективной, не решает фундаментальную проблему — гарантии её корректности в непредсказуемых условиях. “Оптимизация без анализа” — самообман, и разработчик, поддающийся этой ловушке, рискует построить хрупкую конструкцию.
Будущие исследования должны быть направлены не только на увеличение масштаба моделей и объёма данных, но и на разработку формальных методов верификации и валидации моделей мира. Необходимо искать способы обеспечения робастности алгоритмов к шумам и неполноте информации. Простое увеличение количества параметров, без глубокого понимания лежащих в основе принципов, — путь в никуда.
Перспективы кажутся многообещающими, но истинный прогресс требует критического взгляда на текущие достижения. Необходимо стремиться не к созданию “умных” роботов, а к разработке систем, поведение которых можно предсказать и контролировать. Иначе, все эти сложные модели останутся лишь впечатляющими, но бесполезными игрушками.
Оригинал статьи: https://arxiv.org/pdf/2602.12099.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Квантовая магия: Революция нулевого уровня!
- Разумные языковые модели: новый подход к логическому мышлению
- Самообучающиеся агенты: извлечение навыков из открытого кода
- Квантовый горизонт лазеров: ресурсы когерентности
- Ускорение ИИ на FPGA: Архитектура и Производительность
- Квантовые схемы и ИИ: Новые горизонты программирования
- Быстрый поиск по геному: Новые алгоритмы для spaced k-mers
- Квантовый разум: Новая эра языковых моделей
- Динамичные миры: Создание реалистичных 4D-моделей из видео
- Квантовые схемы: новый взгляд на трансляцию с помощью нейросетей
2026-02-14 11:04