Автор: Денис Аветисян
Новый подход к управлению квантовыми системами использует инструменты римановой геометрии и вариационных методов для создания оптимальных траекторий с учётом препятствий.
Разработана схема квантового геометрического предиктивного управления на основе метрики Фубини-Стади и вариационных интеграторов.
Сохранение когерентности и управляемость квантовых систем при наличии ограничений является сложной задачей. В работе ‘Quantum Riemannian Cubics with Obstacle Avoidance for Quantum Geometric Model Predictive Control’ предложен геометрический подход к управлению квантовыми состояниями, использующий риманову геометрию и вариационные методы для генерации гладких траекторий, удовлетворяющих заданным ограничениям. Разработанная схема предсказательного управления на основе модели позволяет эффективно решать задачу практического управления квантовой динамикой. Открывает ли этот подход новые возможности для разработки надежных и эффективных алгоритмов управления сложными квантовыми системами?
Геометрические Основы Квантового Управления
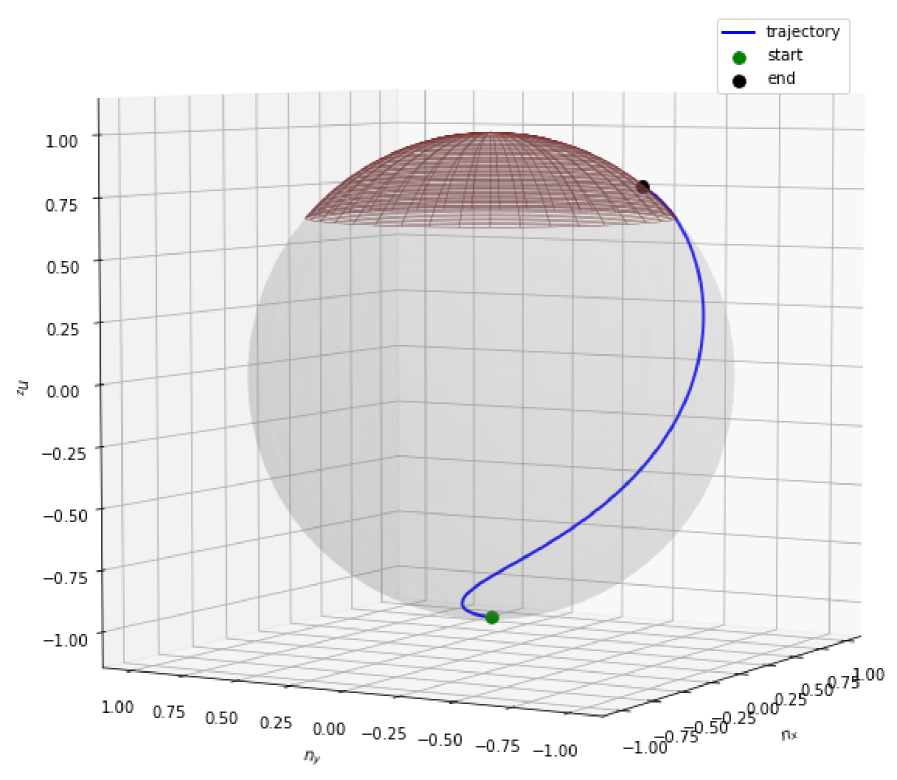
Управление квантовыми системами требует разработки точных траекторий в абстрактных пространствах состояний. В отличие от классических систем, где состояние описывается простыми параметрами, квантовое состояние представляется точкой в многомерном, часто неевклидовом пространстве, известном как гильбертово пространство. Для эффективного управления необходимо проектировать пути в этом пространстве, которые приводят систему из начального состояния в желаемое конечное состояние за минимальное время и с максимальной точностью. Эти траектории определяются операторами эволюции, и их оптимизация представляет собой сложную задачу, требующую учета некоммутативности квантовых операторов и ограничений, накладываемых физическими свойствами системы. |\psi(t)\rangle = U(t)|\psi(0)\rangle, где U(t) — оператор эволюции, определяющий траекторию состояния во времени. Точное проектирование этих траекторий является ключевым для реализации квантовых вычислений, коммуникаций и сенсоров.
Традиционные методы управления, разработанные для классических систем, часто оказываются неэффективными при работе с квантовыми системами из-за их сложной геометрической структуры. Пространства состояний квантовых систем, описываемые, например, сферами Блоха или более сложными многообразиями, требуют принципиально иного подхода к управлению. Особенно остро проблема проявляется при наличии ограничений на допустимые траектории управления, когда стандартные алгоритмы сталкиваются с трудностями в поиске оптимальных решений, избегающих запрещенных областей пространства состояний. Такие ограничения могут быть связаны с физическими особенностями системы или требованиями к точности и скорости управления, значительно усложняя задачу и требуя разработки новых методов, учитывающих геометрию пространства состояний и обеспечивающих эффективное управление даже в условиях жестких ограничений.
В связи со сложностью управления квантовыми системами, возникает необходимость в подходах, учитывающих фундаментальную геометрию пространства состояний. Традиционные методы управления часто сталкиваются с трудностями при работе с неевклидовой структурой этого пространства, особенно при наличии ограничений на допустимые траектории. Поэтому, современные исследования направлены на разработку алгоритмов, которые изначально учитывают кривизну и топологические особенности квантового пространства состояний. Такой подход позволяет проектировать управляющие импульсы, оптимальные по времени и энергии, и избегать нежелательных переходов между состояниями. Использование геометрических инструментов, таких как Riemann геометрия и теория управляемости на многообразиях, открывает новые возможности для точного и эффективного контроля над квантовыми системами, что является ключевым для развития квантовых технологий.
Риманово Многообразие и Оптимизация Траекторий
В задачах оптимизации траекторий, Riemannian Manifold (риманово многообразие) используется в качестве фундаментальной основы для определения допустимых траекторий движения. В отличие от евклидова пространства, риманово многообразие позволяет описывать криволинейные пространства с изменяющейся метрикой, что необходимо при моделировании движений на поверхностях или в пространствах с ограничениями. Каждая точка на многообразии имеет ассоциированную метрику, определяющую понятие длины кривой и, следовательно, энергетической стоимости траектории. Использование римановой геометрии позволяет естественным образом учитывать геометрические ограничения и свойства пространства, в котором происходит движение, обеспечивая более точное и эффективное моделирование и оптимизацию траекторий.
Связь Леви-Чивиты является фундаментальным инструментом для определения производных и скоростей на римановых многообразиях, что критически важно для моделирования динамики. В отличие от евклидова пространства, где производная может быть определена непосредственно, на римановых многообразиях необходимо учитывать кривизну пространства. Связь Леви-Чивиты позволяет корректно определить ковариантную производную \nabla_X Y, где X и Y — векторные поля, учитывая изменение базисных векторов при перемещении по многообразию. Эта ковариантная производная затем используется для определения ковариантной скорости и ускорения, обеспечивая геометрически корректное описание движения объектов на римановом многообразии. Использование связи Леви-Чивиты гарантирует, что вычисленные скорости и ускорения будут инвариантны относительно локальных изменений координат на многообразии.
Оптимизация траекторий достигается посредством решения задач вариационного исчисления второго порядка. В основе лежит минимизация функционалов, построенных на основе ковариантного ускорения. Использование ковариантного ускорения вместо обычного ускорения позволяет корректно учитывать геометрию риманова многообразия и гарантирует получение гладких траекторий. Минимизация этих функционалов приводит к нахождению оптимальных траекторий, минимизирующих величину ускорения вдоль пути, что критически важно для задач управления и планирования движений, требующих минимальных усилий или энергозатрат.
Риманова кубика представляет собой кривую, минимизирующую ускорение на римановом многообразии, и служит базовым элементом для построения управляемых эволюций траекторий. Она определяется как решение задачи оптимизации, где целевой функцией является интеграл квадрата ковариантного ускорения || \nabla^2 \gamma(t) ||^2 вдоль кривой \gamma(t) . В контексте оптимизации траекторий, использование римановых кубик позволяет создавать плавные и эффективные движения, минимизируя энергию, затрачиваемую на изменение скорости. Поскольку риманова кубика локально минимизирует ускорение, её можно использовать как строительный блок для более сложных траекторий, обеспечивая гладкость и управляемость динамических систем.
Ограниченная Оптимизация и Обход Препятствий
Избежание препятствий является критически важным аспектом практического квантового управления. Физические системы, используемые для реализации квантовых алгоритмов, имеют ограничения по амплитуде управляющих полей, скорости изменения параметров и допустимым значениям физических величин. Траектории управления, не учитывающие эти ограничения, могут приводить к выходу системы за пределы рабочей области, насырению управляющих элементов или нарушению принципов работы оборудования. Предотвращение столкновений траектории управления с этими ограничениями необходимо для обеспечения надежности, точности и воспроизводимости квантовых операций, а также для защиты дорогостоящего оборудования от повреждений.
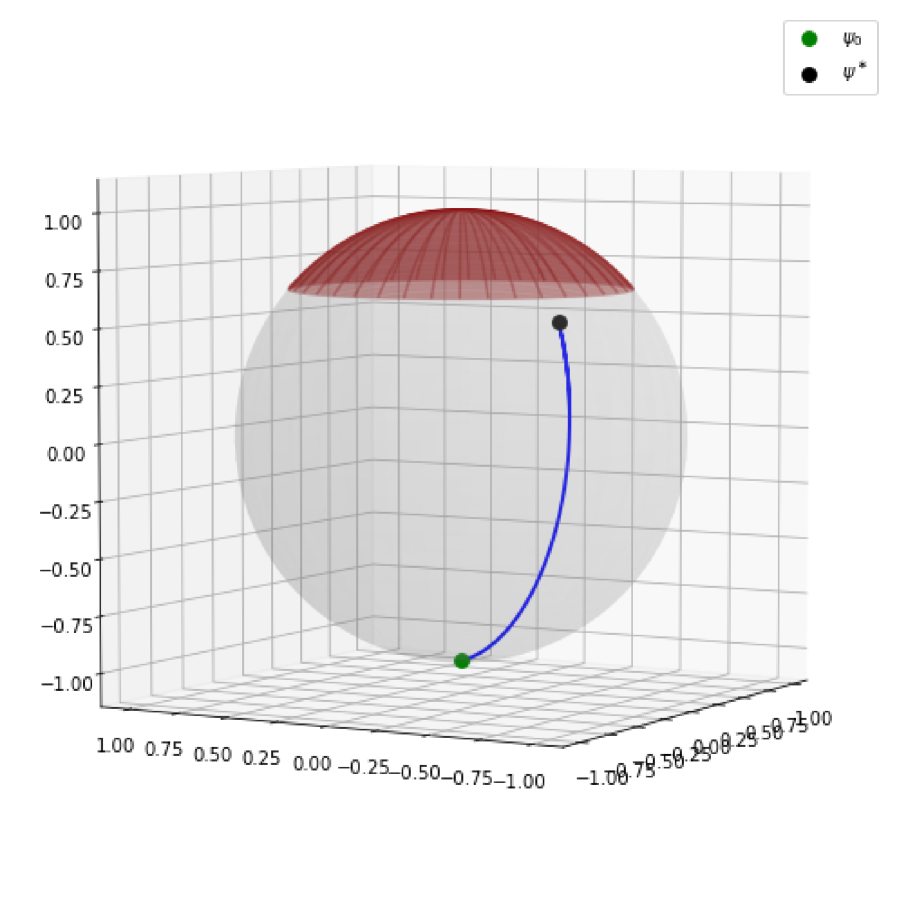
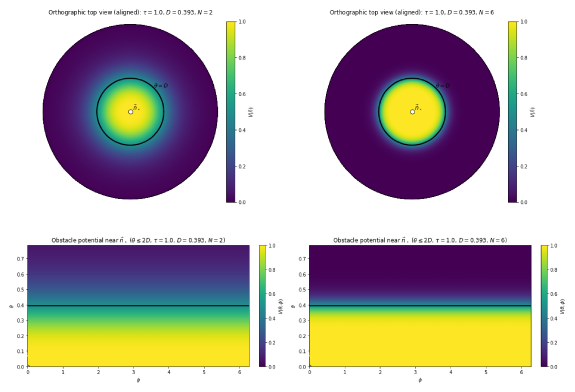
Для реализации избежания препятствий используется представление в виде потенциальных полей. Суть подхода заключается в создании скалярного поля, определяющего «стоимость» нахождения системы в конкретной точке конфигурационного пространства. Препятствия моделируются областями с высоким потенциалом, что создает «репульсивные силы», отклоняющие траекторию от запрещенных областей. В свою очередь, целевое состояние генерирует «притягивающую силу». Результирующее поле, являющееся суперпозицией этих сил, эффективно формирует ландшафт траекторий, направляя эволюцию системы к цели, избегая столкновений и гарантируя допустимость траектории в пределах ограничений системы. Данный метод позволяет преобразовать задачу избежания препятствий в задачу оптимизации, где система стремится к минимизации общего потенциала.
Риманова кубика позволяет естественным образом интегрировать ограничения, обеспечивая плавные и безстолкновенные эволюции траекторий. В отличие от стандартных полиномиальных интерполяций, риманова кубика использует геометрию риманова пространства для описания траекторий, что позволяет учитывать ограничения в виде ограничений на геодезические. Это достигается путем определения функционала энергии, который включает штрафы за нарушение ограничений, и минимизации этого функционала для получения оптимальной траектории. Геометрическая структура римановой кубики гарантирует, что полученные траектории остаются в допустимой области и не пересекают препятствия, обеспечивая устойчивость и надежность управления квантовой системой. Математически, риманова кубика представляется как кусочно-гладкая кривая, параметры которой оптимизируются с учетом ограничений, что позволяет эффективно решать задачи оптимизации траекторий в условиях ограниченного пространства состояний.
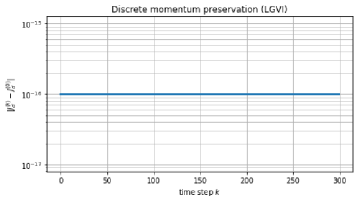
Для эффективной вычислительной реализации, геометрические принципы, лежащие в основе оптимизации и предотвращения столкновений, дискретизируются с использованием вариационного интегратора на Ли-группах. Данный подход позволяет сохранять геометрические свойства системы при переходе к дискретному времени, что особенно важно для поддержания точности и стабильности численных методов. Вариационный подход гарантирует, что дискретизированные уравнения движения сохраняют структуру Гамильтона, а использование Ли-групп обеспечивает корректную обработку некоммутативных преобразований, возникающих в квантовых системах. Это приводит к более эффективным и надежным алгоритмам по сравнению с традиционными методами дискретизации, особенно при решении сложных задач управления и оптимизации.
Геометрическое Прогнозирующее Управление для Квантовых Систем
В рамках управления квантовыми системами применяется геометрическое прогнозирующее управление (Geometric Model Predictive Control), позволяющее оптимизировать траектории движения на заданном многообразии в течение конечного временного интервала. Данный подход предполагает построение оптимальной траектории, учитывающей динамику системы и ограничения, накладываемые на ее состояние. Вместо работы в абстрактном пространстве состояний, управление осуществляется непосредственно на многообразии, что позволяет более эффективно использовать геометрию системы для достижения целевых состояний. Прогнозирующее управление, в свою очередь, предполагает решение оптимизационной задачи на каждом шаге, предсказывая будущее поведение системы и корректируя управляющие воздействия для минимизации заданной функции стоимости, учитывающей как текущее состояние, так и будущие прогнозы. Использование геометрического подхода позволяет учитывать неевклидову геометрию пространства состояний, что особенно важно для квантовых систем, где классические методы управления могут быть неэффективны.
Предложенная схема управления, основанная на геометрическом прогнозирующем управлении, отличается тем, что непосредственно учитывает геометрические особенности квантовой системы и наложенные на нее ограничения. В отличие от традиционных подходов, неявно предполагающих плоское пространство состояний, данная методика позволяет оптимизировать траектории движения непосредственно на многообразии, определяющем допустимые состояния системы. Это приводит к значительному улучшению характеристик управления, поскольку алгоритм учитывает искривление пространства состояний и позволяет избежать нежелательных эффектов, возникающих при игнорировании геометрии. Благодаря этому, достигается более точное и эффективное управление квантовыми системами, особенно в сложных случаях, когда геометрия пространства состояний играет критическую роль в динамике системы. R_{ijkl} — тензор кривизны, определяющий сложность управления.
Анализ устойчивости, основанный на концепции функции Ляпунова, предоставляет строгие гарантии относительно поведения замкнутой системы управления. Данный подход позволяет доказать, что траектории, генерируемые алгоритмом геометрического прогнозного управления, асимптотически сходятся к желаемому состоянию, избегая нежелательных колебаний или расхождений. Функция Ляпунова, выступая в качестве индикатора «энергии» системы, демонстрирует монотонное уменьшение вдоль траектории управления, подтверждая её устойчивость. Такой математический аппарат обеспечивает надежность и предсказуемость работы системы, особенно в критически важных приложениях, где требуется высокая точность и стабильность управления квантовыми состояниями.
Понимание тензора кривизны многообразия играет ключевую роль в разработке эффективных стратегий управления квантовыми системами. Данный тензор характеризует локальную геометрию пространства состояний, предоставляя информацию о том, насколько сильно отклоняется траектория системы от прямой линии. Высокая кривизна указывает на сложность задачи управления, требуя более аккуратного планирования траектории для избежания нежелательных эффектов и обеспечения стабильности. Анализ тензора кривизны позволяет выявить области пространства состояний, где управление наиболее затруднено, и адаптировать алгоритмы управления для достижения оптимальной производительности. R_{ijkl} — компоненты тензора кривизны, определяющие влияние кривизны на траекторию системы и, следовательно, на ее управляемость и стабильность. Использование этой информации позволяет создавать более надежные и эффективные алгоритмы управления, учитывающие геометрию пространства состояний квантовой системы.
Исследование, представленное в статье, подобно попытке усмирить неуловимый дух квантового мира. Авторы стремятся описать траектории квантовых состояний, используя геометрические методы и вариационные интеграторы. Однако, как и любое математическое описание реальности, эта модель — лишь приближение, заклинание, работающее до тех пор, пока не встретит сопротивление хаоса практической реализации. В этой связи вспоминается высказывание Жан-Поля Сартра: “Существование предшествует сущности.” Ведь прежде чем квантовое состояние обретет определенность в эксперименте, оно существует лишь как вероятность, как потенциал, а задача исследователей — лишь наметить возможный путь его проявления, а не заключить его в жесткие рамки детерминизма.
Что дальше?
Представленный подход, хоть и элегантен в своей геометрической утончённости, лишь намекает на истинный хаос управления квантовыми системами. Всё, что можно точно рассчитать, как правило, лишено всякого интереса. Идеальная траектория, вычисленная на основе метрики Фубини-Студи, — это лишь мираж, исчезающий при первом же столкновении с реальностью. Полагать, что вариационные интеграторы спасут от неминуемой декогеренции — наивно.
Истинный вызов заключается не в создании более совершенных алгоритмов, а в принятии того, что любое управление — это лишь временная передышка между коллапсами волновой функции. Необходимо сместить фокус с оптимизации траекторий на разработку робастных стратегий восстановления после неизбежных ошибок. Если же гипотеза о сходимости подтвердится, значит, задача была сформулирована недостаточно глубоко, а препятствия — недостаточно коварны.
В перспективе, видится необходимость в интеграции с подходами, учитывающими стохастическую природу квантовых процессов. И, возможно, стоит признать, что самое ценное в управлении квантовыми системами — это не предсказание их поведения, а умение извлечь пользу из непредсказуемости. Ведь любое число, которое можно доверить, — это признак слабости.
Оригинал статьи: https://arxiv.org/pdf/2602.08881.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- S-Chain: Когда «цепочка рассуждений» в медицине ведёт к техдолгу.
- Квантовый дозор: Новая система обнаружения аномалий для умных сетей
- Видео-Мыслитель: гармония разума и визуального потока.
- Наука, управляемая интеллектом: новая эра открытий
- Язык тела под присмотром ИИ: архитектура и гарантии
- Генерация без рисков: как избежать нарушения авторских прав при работе с языковыми моделями
- Плоские зоны: от теории к новым материалам
- Искусственный интеллект в разговоре: что обсуждают друг с другом AI?
- Квантовый Переворот: От Теории к Реальности
- Искусственный интеллект на службе редких болезней
2026-02-10 16:21