Автор: Денис Аветисян
Новая платформа Agent Mars позволяет исследовать стратегии координации больших групп роботов и людей в условиях марсианской базы.
Исследование и моделирование иерархического управления и коммуникационных связей в многоагентных системах для эффективной колонизации Марса.
Несмотря на успехи искусственного интеллекта в различных сферах, координация сложных многоагентных систем в условиях ограниченных ресурсов и задержек связи остается сложной задачей, особенно в контексте освоения дальнего космоса. В настоящей работе представлена платформа ‘Agent Mars: Multi-Agent Simulation for Multi-Planetary Life Exploration and Settlement’, предназначенная для моделирования и анализа стратегий координации большого числа агентов в условиях марсианской базы. Разработанный фреймворк позволяет исследовать влияние иерархического управления и целенаправленных коммуникационных связей на эффективность и надежность работы системы. Какие новые возможности для повышения автономности и отказоустойчивости космических миссий открывает предложенный подход к моделированию и управлению многоагентными системами?
Координация на Марсе: Вызов Автономности
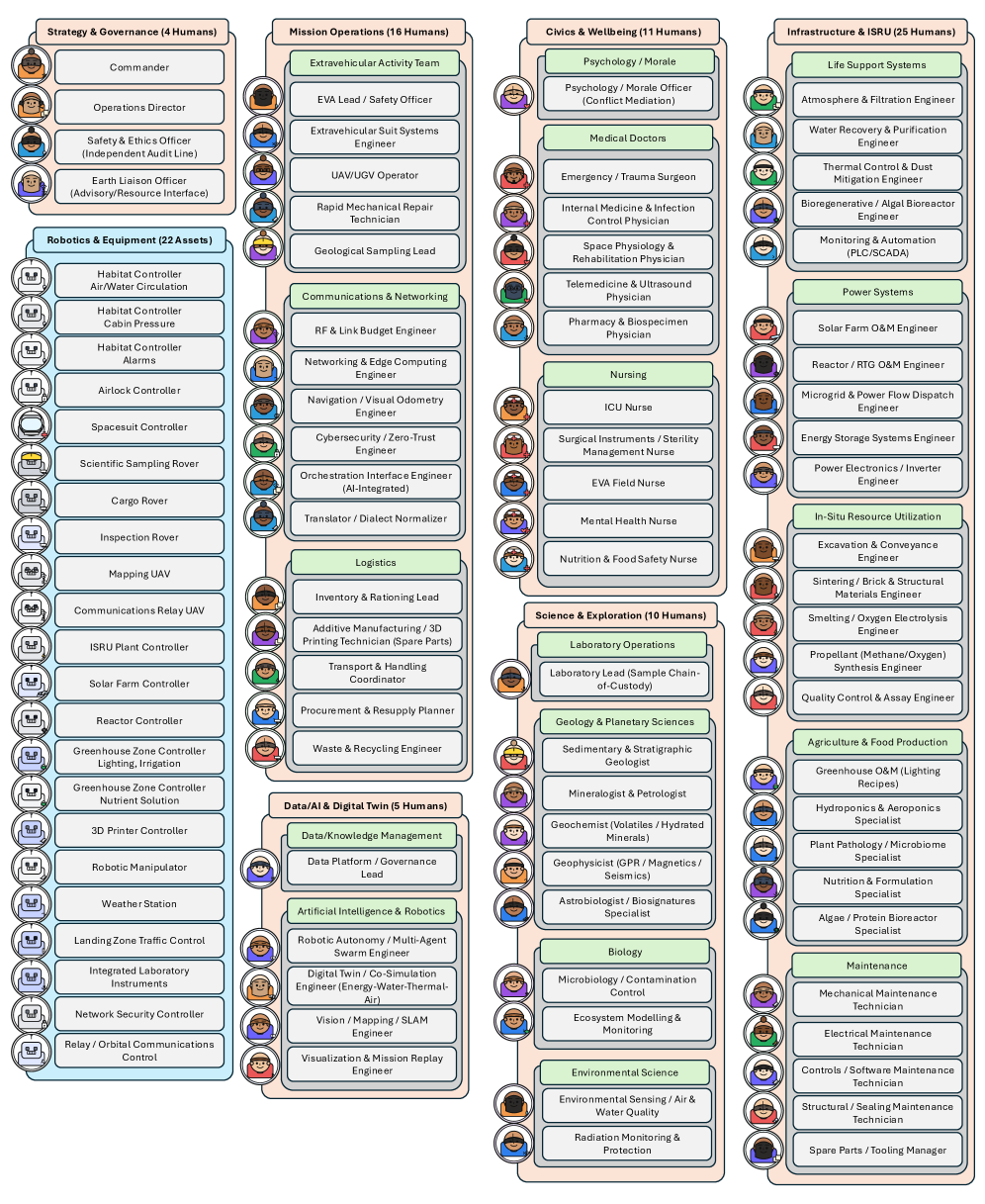
Для создания полностью самодостаточной марсианской базы требуется координация между специализированными агентами, беспрецедентная по своему масштабу и сложности. Это подразумевает не просто совместную работу, но и интеграцию усилий различных специалистов — от инженеров-строителей и биологов, занимающихся созданием замкнутых экосистем, до медиков и специалистов по добыче ресурсов. Каждый агент обладает уникальными знаниями и задачами, и их эффективное взаимодействие критически важно для решения сложных проблем, возникающих в условиях чужой планеты. Достижение этой координации требует не только передовых технологий связи и автоматизации, но и новых подходов к организации труда и управлению, учитывающих специфику марсианской среды и необходимость оперативного реагирования на непредвиденные обстоятельства. Успех колонизации Марса напрямую зависит от способности создать слаженную систему, в которой каждый агент вносит свой вклад в общее дело, обеспечивая устойчивое развитие базы и безопасность ее обитателей.
Осуществление централизованного управления марсианской колонией сталкивается с принципиальными трудностями, обусловленными колоссальными расстояниями и, как следствие, значительной задержкой сигнала между Землей и Марсом. Эта задержка, известная как время светового пробега, составляет от нескольких минут до более чем двадцати, что делает невозможным оперативное реагирование на возникающие ситуации посредством традиционных систем управления. Любая команда, отправленная с Земли, достигнет Марса лишь спустя значительное время, а ответное сообщение потребует аналогичной задержки, что исключает возможность эффективного контроля в реальном времени и делает необходимым разработку автономных систем, способных самостоятельно принимать решения и адаптироваться к изменяющимся условиям без постоянного участия земных операторов.
Для успешной колонизации Марса необходимы децентрализованные многоагентные системы, способные функционировать в условиях ограниченной пропускной способности и значительных задержек связи с Землей. Эти системы должны быть устойчивы к сбоям и адаптироваться к меняющимся обстоятельствам без централизованного управления, поскольку задержка сигнала между планетами исключает возможность оперативного вмешательства извне. Каждая «агент» — будь то робот-строитель, модуль жизнеобеспечения или научная лаборатория — должна обладать определенной степенью автономии и способностью самостоятельно принимать решения, координируя свои действия с другими агентами посредством локальных коммуникаций и обмена данными. Такая архитектура позволит колонии эффективно функционировать даже в случае выхода из строя отдельных компонентов или нарушения связи с Землей, обеспечивая ее долгосрочную устойчивость и самодостаточность.
Многоагентное Обучение с Подкреплением: Основа Автономной Координации
Многоагентное обучение с подкреплением (MARL) представляет собой перспективную основу для разработки децентрализованных систем управления. В отличие от традиционных подходов, требующих централизованного планирования и координации, MARL позволяет нескольким агентам обучаться взаимодействию и достижению общих целей посредством проб и ошибок, без явного программирования каждого действия. Это особенно важно в сложных и динамичных средах, где централизованное управление может оказаться неэффективным или невозможным. Децентрализованная природа MARL обеспечивает масштабируемость и отказоустойчивость, поскольку отказ одного агента не приводит к полному сбою системы. Примерами применения являются управление роем роботов, оптимизация транспортных потоков и координация распределенных энергетических ресурсов.
Алгоритмы, такие как MAPPO, QMIX и MADDPG, позволяют агентам осваивать кооперативное поведение посредством обучения с подкреплением без явного программирования. В отличие от традиционных подходов, требующих жестко заданных правил, эти алгоритмы используют метод проб и ошибок, где агенты взаимодействуют со средой и друг с другом, получая вознаграждение за достижение общих целей. MAPPO (Multi-Agent Proximal Policy Optimization) использует политику оптимизации, QMIX — декомпозицию функции Q для совместной оптимизации, а MADDPG (Multi-Agent Deep Deterministic Policy Gradient) — детерминированные политики и централизованную критику для улучшения обучения. В процессе обучения агенты адаптируют свои стратегии, максимизируя совокупное вознаграждение, что приводит к возникновению сложных и эффективных кооперативных стратегий без необходимости ручного кодирования каждого действия.
Эффективная коммуникация остается критически важной проблемой в многоагентном обучении с подкреплением (MARL). Отсутствие централизованного управления требует от агентов обмена информацией для координации действий и достижения общих целей. Архитектуры, обеспечивающие эффективный обмен данными, такие как параметрическое разделение коммуникаций или использование графовых нейронных сетей для моделирования взаимосвязей между агентами, необходимы для преодоления сложностей, возникающих из-за неполной наблюдаемости и несинхронности действий. Разработка протоколов коммуникации, оптимизированных для конкретных задач и учитывающих ограничения пропускной способности и задержек, является ключевым направлением исследований в области MARL.
Дифференцируемая Коммуникация: Эволюционирующие Протоколы Взаимодействия
Дифференцируемые модели коммуникации, такие как CommNet, DIAL и TarMAC, позволяют агентам осваивать протоколы обмена данными параллельно с обучением стратегий управления. В отличие от традиционных подходов, где протоколы задаются вручную, эти модели интегрируют коммуникацию непосредственно в процесс обучения с подкреплением. Это достигается за счет использования дифференцируемых каналов связи, позволяющих вычислять градиенты и оптимизировать как политики агентов, так и стратегии коммуникации. В результате агенты способны адаптировать свои коммуникационные протоколы для повышения эффективности совместной деятельности, что позволяет им согласовывать действия и достигать общих целей более эффективно.
Модели дифференцируемой коммуникации позволяют проводить сквозное обучение (end-to-end training), в процессе которого стратегии коммуникации оптимизируются совместно с политиками управления агентами. Этот подход позволяет агентам не только обучаться выполнению задач, но и адаптировать способы обмена информацией для повышения эффективности коллективной работы. В отличие от традиционных методов, где коммуникация задается вручную, сквозное обучение позволяет агентам самостоятельно выявлять наиболее оптимальные протоколы связи, что приводит к улучшению координации и, как следствие, повышению общей производительности системы. Оптимизация включает в себя адаптацию содержимого сообщений, частоты обмена данными и выбор получателей, что позволяет минимизировать задержки и максимизировать полезность передаваемой информации.
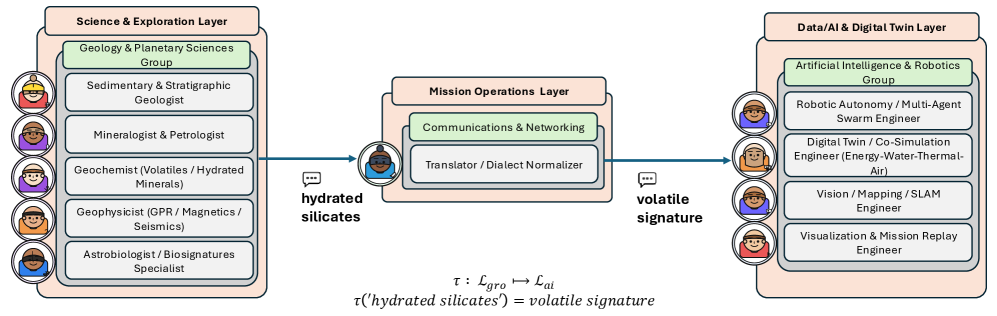
В симуляции Agent Mars модели дифференцируемой коммуникации совершенствуются для решения задач координации специализированных групп агентов. Ключевым элементом является агент-переводчик, реализующий гетерогенные протоколы обмена данными. В сценарии ScienceExploration использование данной архитектуры позволило сократить время выполнения задач до 51.3% по сравнению с жесткой иерархической маршрутизацией. Это свидетельствует о значительном повышении эффективности коллективной деятельности за счет оптимизации коммуникационных стратегий и адаптации к разнородным группам агентов.
Память и Консенсус: Обеспечение Надёжности и Устойчивости Агентов
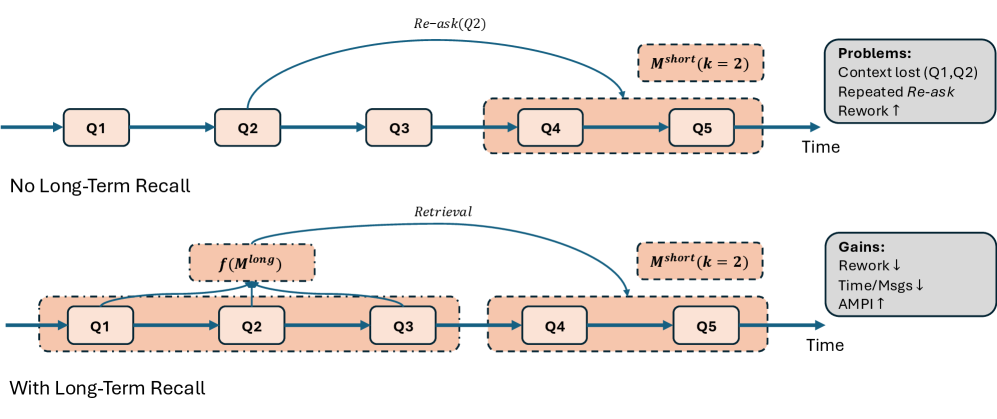
Внедрение контекстно-зависимой памяти в агентов на основе больших языковых моделей (LLM) позволяет им эффективно извлекать и использовать информацию из предыдущих взаимодействий, значительно улучшая процесс принятия решений в динамичных условиях. Агенты, оснащенные такой памятью, способны учитывать историю событий, адаптироваться к изменяющимся обстоятельствам и избегать повторения ошибок. Этот подход особенно важен в сложных сценариях, где быстрое и точное реагирование критически важно, поскольку позволяет агентам действовать более обоснованно и предвидеть возможные последствия своих действий. Способность к сохранению и использованию контекста повышает общую надежность и эффективность работы агентов, делая их более приспособленными к реальным, непредсказуемым средам.
Механизмы консенсуса, основанные на предложении и голосовании, позволяют группам агентов достигать согласия даже в условиях неопределенности или противоречивых целей. В основе этого подхода лежит процесс, при котором каждый агент выдвигает предложение, а затем все агенты голосуют за или против него. В случае разногласий, система может использовать различные правила для определения окончательного решения, например, взвешенное голосование или повторное обсуждение. Такой подход обеспечивает устойчивость к ошибкам отдельных агентов и позволяет группе эффективно функционировать даже в сложных и динамичных средах, где полная координация невозможна или нецелесообразна. Это особенно важно в сценариях, требующих коллективного принятия решений, например, в управлении ресурсами или реагировании на чрезвычайные ситуации.
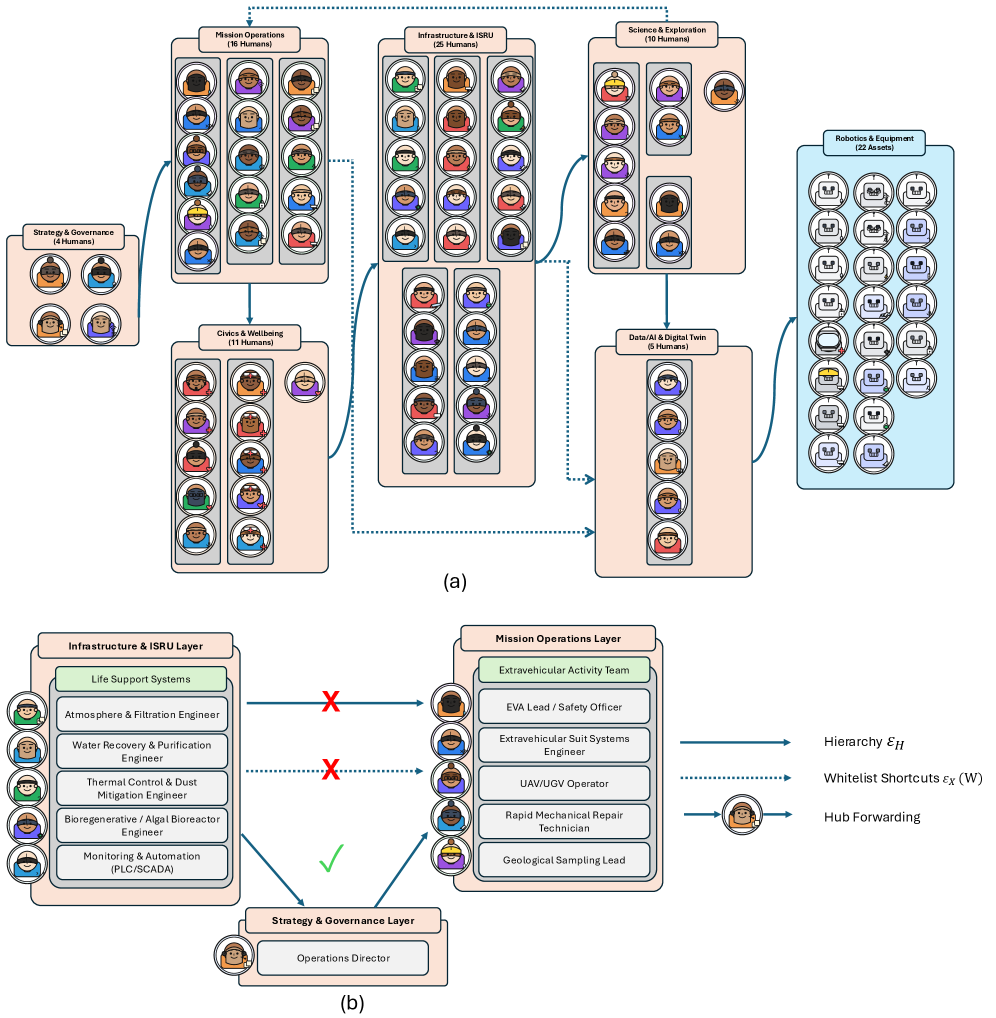
Для оценки эффективности стратегий координации в реалистичных симуляциях марсианской базы был разработан Индекс эффективности агентов Марса (AMPI). Результаты исследований демонстрируют значительное снижение количества сбоев — с 0.10 до 0.01 в сценариях экстренного реагирования и с 0.05 до 0.01 в сценариях ежедневной деятельности, достигнутое благодаря внедрению разнородных протоколов. Кроме того, зафиксировано сокращение времени выполнения задач на 17.4% в сценариях ежедневной деятельности и на 28.3% в сценарии CommsBlackoutEVA при использовании кросс-слойной маршрутизации, что подтверждает эффективность предложенных подходов к обеспечению надежной работы агентов в сложных условиях.
Исследование, представленное в работе, демонстрирует важность структурированного подхода к координации действий в сложных системах, что находит отражение в словах Грейс Хоппер: «Лучший способ предсказать будущее — это создать его». В Agent Mars, как и в любом сложном проекте освоения космоса, ключевым фактором является не просто наличие большого количества автономных агентов, а их способность эффективно взаимодействовать друг с другом. Иерархическое управление и тщательно подобранные каналы связи, описанные в статье, позволяют создать именно ту структуру, которая способствует эффективному поведению всей системы. Это подтверждает идею о том, что структура определяет поведение, и что продуманная организация является залогом успеха даже в самых амбициозных начинаниях.
Куда Далее?
Представленная работа, исследуя координацию множества агентов в условиях марсианской базы, выявляет не столько ответы, сколько углубляет вопросы. Если система держится на костылях из тщательно выверенных каналов связи и иерархического управления, то, возможно, мы изначально переусложнили задачу. Модульность, без понимания истинного контекста взаимодействия агентов, — иллюзия контроля, а не реальное решение. Следующим шагом видится отказ от упрощенных моделей поведения в пользу более правдоподобных, учитывающих не только рациональность, но и непредсказуемость, присущую живым системам.
Особое внимание следует уделить изучению самоорганизации. Способны ли агенты, действуя по простым правилам, спонтанно формировать эффективные структуры, адаптирующиеся к меняющимся условиям? Или же любая, даже кажущаяся гибкой, иерархия, неизбежно становится узким местом, ограничивающим потенциал системы? Настоящая устойчивость кроется не в жестком контроле, а в способности к адаптации и восстановлению после сбоев.
В конечном счете, исследование автономных систем для освоения космоса — это не только инженерная задача, но и философский эксперимент. Создавая искусственные «коллективные разумы», мы неизбежно сталкиваемся с вопросами о природе интеллекта, сотрудничества и управления. Истинный прогресс лежит не в создании все более сложных систем, а в понимании фундаментальных принципов, лежащих в основе любых живых, самоорганизующихся структур.
Оригинал статьи: https://arxiv.org/pdf/2602.13291.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Новая формула для расчёта взаимодействий глюонов открывает горизонты для голографии пространства
- Квантовый импульс для нейросетей: новый подход к распознаванию изображений
- Искусственный интеллект на страже экологии: защита данных и справедливые алгоритмы
- Взрыв скорости: Оптимизация внимания для современных GPU
- Разумные языковые модели: новый подход к логическому мышлению
- Таблицы оживают: Искусственный интеллект осваивает структурированные данные
- Ожившие Пиксели: Создание Реалистичных Видео с Сохранением Личности
- Автоматическая оптимизация вычислений: новый подход к библиотекам математических функций
- Текстуры вместо Гауссиан: Новый подход к синтезу видов
- Конфиденциальный анализ больших данных: новый подход к быстрым ответам
2026-02-17 23:19