Автор: Денис Аветисян
Новый метод позволяет восстанавливать трехмерную картину движения объектов в видеопотоке, отделяя движение камеры от движения самих объектов.

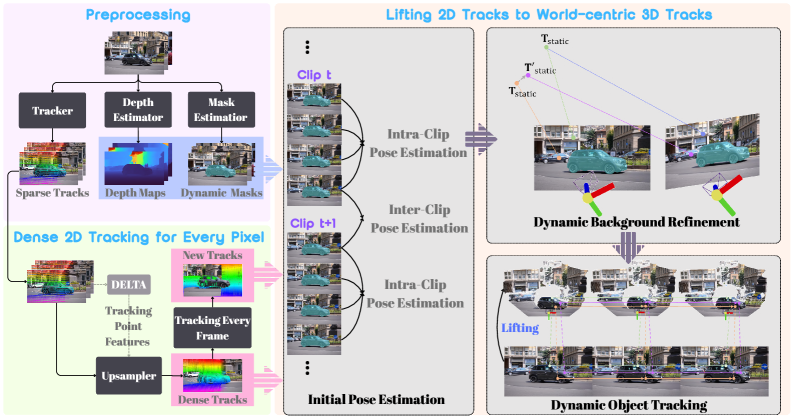
Представлен алгоритм TrackingWorld для плотного 3D-отслеживания в мироцентрированной системе координат на основе монокулярного видео.
Несмотря на значительный прогресс в области 3D-отслеживания по монокулярному видео, существующие методы часто испытывают трудности в разделении движения камеры от динамики объектов и обеспечении плотного отслеживания вновь появляющихся объектов. В данной работе, представленной под названием ‘TrackingWorld: World-centric Monocular 3D Tracking of Almost All Pixels’, предлагается новый подход к плотному 3D-отслеживанию, основанный на построении траекторий в мироцентрированной системе координат. Ключевым результатом является разработка конвейера, эффективно преобразующего разреженные 2D-треки в плотные и обеспечивающего обобщение на новые объекты за счет уменьшения избыточности данных. Позволит ли предложенный метод создать более точные и надежные системы 3D-восприятия в реальном времени?
За гранью простого отслеживания: вызовы плотного 3D-реконструкции
Точное и плотное трехмерное отслеживание объектов из монокулярного видео остается серьезной задачей в области компьютерного зрения. Сложность заключается в восстановлении полной трехмерной структуры сцены, используя информацию только из одного источника изображения. Существующие алгоритмы часто сталкиваются с проблемами при определении масштаба, скорости и ориентации объектов, особенно в динамичных условиях, где происходят быстрые изменения. Восстановление достоверной трехмерной информации требует преодоления неоднозначности, возникающей из-за отсутствия стереоскопического зрения, что делает задачу особенно сложной для приложений, требующих высокой точности и надежности, таких как робототехника, дополненная реальность и автономное вождение.
Существующие методы трехмерного отслеживания сталкиваются с серьезными трудностями при работе с динамичными сценами, что обусловлено проблемами масштабируемости, эффективности и устойчивости. При увеличении сложности сцены и количества отслеживаемых объектов, вычислительные затраты растут экспоненциально, что приводит к снижению скорости обработки и невозможности работы в режиме реального времени. Кроме того, алгоритмы часто демонстрируют неустойчивость при резких движениях, изменениях освещения или появлении новых объектов, что приводит к потере отслеживания и неточностям в реконструкции трехмерной модели. Неспособность эффективно справляться с этими факторами ограничивает применимость существующих систем в таких областях, как робототехника, автономное вождение и создание виртуальной реальности.
Существенное ограничение современных методов трехмерного отслеживания заключается в их неспособности последовательно отслеживать практически все пиксели изображения. Вместо полноценной реконструкции сцены, алгоритмы часто фокусируются лишь на ключевых точках или объектах, игнорируя значительную часть визуальной информации. Это приводит к неполному пониманию динамики сцены, затрудняя точную оценку положения и движения объектов, особенно в сложных и быстро меняющихся условиях. Отсутствие отслеживания всех пикселей ограничивает возможности анализа мелких деталей, текстур и взаимодействий между объектами, что существенно снижает качество реконструкции и препятствует развитию приложений, требующих детального понимания визуальной среды, таких как робототехника и дополненная реальность.
Для преодоления ограничений существующих методов трехмерного отслеживания требуется принципиально новый подход к обработке видеоданных. Вместо фокусировки на отслеживании отдельных точек или объектов, необходимо перейти к системам, способным извлекать и использовать всю информационную насыщенность видеопотока. Это означает разработку алгоритмов, учитывающих не только видимые изменения, но и скрытые закономерности, текстуру, освещение и другие визуальные подсказки. Такой сдвиг парадигмы позволит создавать более полные и точные трехмерные модели сцены, обеспечивая надежное отслеживание практически каждого пикселя и открывая новые возможности для понимания динамических процессов, происходящих в кадре. Эффективная реализация подобного подхода требует интеграции передовых методов машинного обучения, включая глубокие нейронные сети, способные к извлечению сложных признаков и построению многомерных представлений видеоданных.
TrackingWorld: Система координат для плотного 3D-отслеживания
В основе TrackingWorld лежит представление всех результатов 3D-отслеживания в единой ‘Мировой системе координат’. Это обеспечивает согласованность и возможность интеграции данных, полученных из различных источников и в разные моменты времени. Все положения, ориентации и размеры отслеживаемых объектов преобразуются и хранятся относительно этой глобальной системы отсчета, что позволяет точно вычислять траектории, взаимодействия и относительные перемещения объектов в пространстве. Использование единой мировой системы координат упрощает процессы калибровки, фильтрации и последующего анализа данных отслеживания, обеспечивая надежную и точную реконструкцию сцены.
В основе TrackingWorld лежит использование существующих методов 2D-отслеживания, таких как CoTrackerV3 и DELTA, для инициализации и направления процесса 3D-отслеживания. CoTrackerV3 обеспечивает надежное отслеживание объектов на основе корреляции признаков, а DELTA — отслеживание с высокой точностью и устойчивостью к окклюзиям. Эти 2D-методы предоставляют начальные оценки положения и ориентации объектов, которые затем уточняются и дополняются информацией о глубине, полученной из UniDepth, и динамической оценкой маски. Интеграция с существующими 2D-трекерами позволяет эффективно использовать наработанный опыт и избежать необходимости разработки новых алгоритмов отслеживания с нуля, значительно упрощая и ускоряя процесс разработки TrackingWorld.
В основе TrackingWorld лежит использование UniDepth для получения априорных данных о глубине, что существенно повышает точность и согласованность оценки глубины. UniDepth, являясь моделью предсказания глубины на основе одного изображения, предоставляет начальные оценки глубины для каждой точки в кадре. Эти оценки используются в качестве входных данных для последующей оптимизации и уточнения процесса отслеживания. Интеграция UniDepth позволяет системе эффективно обрабатывать случаи, когда традиционные методы оценки глубины, основанные на стереовидении или структурированном свете, оказываются неэффективными или недоступными, например, при недостаточной текстуре или сложных условиях освещения. Полученные данные о глубине интегрируются в процесс отслеживания для улучшения оценки 3D-положения отслеживаемых объектов и повышения устойчивости к шумам и окклюзиям.
Динамическая оценка масок является ключевым компонентом системы, обеспечивающим точную сегментацию движущихся объектов в видеопотоке. Этот процесс использует алгоритмы анализа движения и визуальных признаков для автоматического определения границ объектов, отличая их от статического фона. Точное выделение движущихся объектов позволяет системе сосредоточить ресурсы отслеживания на релевантных областях изображения, значительно снижая вычислительную нагрузку и повышая устойчивость к шумам и помехам. Использование динамических масок особенно эффективно в сложных сценах с частичной или полной окклюзией объектов, а также при быстром и непредсказуемом движении.

Точная настройка реальности: Bundle Adjustment для 3D-реконструкции
Для повышения точности 3D-реконструкции, TrackingWorld использует метод ‘Bundle Adjustment’ в качестве ключевого этапа уточнения. Данный метод представляет собой нелинейную оптимизацию, совмещающую уточнение положений камер и трехмерных траекторий. В процессе Bundle Adjustment минимизируется ошибка репроекции, что позволяет достичь геометрической согласованности между различными видами сцены и повысить общую точность полученной 3D-модели. Это позволяет существенно снизить погрешности в оценке положения и ориентации камеры, а также в реконструкции геометрии сцены.
Метод “Bundle Adjustment” представляет собой процесс совместной оптимизации положений камер и трехмерных траекторий, направленный на минимизацию ошибки репроекции — разницы между спроецированными точками на изображении и их соответствующими трехмерными координатами. Этот процесс включает в себя итеративную корректировку параметров камер и положения точек в пространстве, что обеспечивает геометрическую согласованность реконструируемой сцены. Минимизация ошибки репроекции достигается путем решения нелинейной задачи оптимизации, учитывающей все доступные наблюдения и их взаимосвязи, что в итоге приводит к более точной и надежной трехмерной реконструкции.
В процессе Bundle Adjustment оптимизация затрагивает не только уточнение положений камер и траекторий, но и одновременную корректировку ‘карт глубины’ ($Depth Maps$). Это позволяет получить более точное представление о геометрии сцены, поскольку происходит совместная оптимизация параметров камер и плотности 3D-реконструкции. Вместо независимой обработки, карты глубины пересчитываются с учетом глобальной геометрической согласованности, обеспечиваемой совместной оптимизацией, что приводит к уменьшению ошибок и повышению общей точности 3D-модели.
Результаты тестирования системы TrackingWorld на стандартных наборах данных Sintel, Bonn и TUM-D демонстрируют более низкие значения метрик ATE (Absolute Trajectory Error), RTE (Relative Pose Error) и RRE (Rotation Error) по сравнению с базовыми методами DUSt3R и MonST3R. Низкие значения ATE указывают на высокую точность глобальной траектории, RTE — на стабильность оценки относительного движения камеры, а RRE — на точность определения ориентации камеры. Полученные данные подтверждают, что оптимизация, реализованная в TrackingWorld, обеспечивает более высокую точность и надежность 3D-реконструкции по сравнению с существующими подходами.

За пределами текущего состояния: Влияние и перспективы развития
Система TrackingWorld представляет собой надежное и эффективное решение для плотного 3D-отслеживания, демонстрирующее превосходство над существующими методами, такими как DUSt3R, Uni4D и MonST3R. В ходе исследований было установлено, что предложенный подход обеспечивает более точное и стабильное отслеживание объектов в сложных сценах, что особенно важно для приложений, требующих высокой точности позиционирования. Данное достижение открывает новые возможности для создания реалистичных и интерактивных виртуальных сред, а также для улучшения производительности робототехнических систем, использующих 3D-восприятие для навигации и манипулирования объектами. Преимущества TrackingWorld заключаются в оптимизированных алгоритмах обработки данных и эффективном использовании вычислительных ресурсов, что позволяет добиться высокой скорости работы и масштабируемости.
Возможности, предоставляемые системой TrackingWorld в области плотного 3D-отслеживания, открывают широкие перспективы для развития различных технологических направлений. В частности, в робототехнике точное определение положения объектов в пространстве критически важно для навигации, манипулирования и взаимодействия роботов с окружающей средой. В сфере дополненной и виртуальной реальности, высококачественное 3D-отслеживание позволяет создавать более реалистичные и захватывающие пользовательские интерфейсы, обеспечивая точную синхронизацию виртуальных объектов с реальным миром. Повышенная точность и эффективность TrackingWorld способствуют созданию более надежных и функциональных систем в этих областях, открывая путь к новым инновациям и приложениям, от автономных транспортных средств до интерактивных развлечений и профессиональных тренажеров.
В ходе исследований удалось значительно повысить скорость обработки данных по сравнению с базовым алгоритмом Uni4D. Данное улучшение стало возможным благодаря стратегии параллельной оптимизации “clip-to-global”, которая позволяет эффективно обрабатывать отдельные фрагменты видеопоследовательности и объединять полученные результаты в единую глобальную модель. Вместо последовательной обработки каждого кадра, система параллельно обрабатывает короткие клипы, а затем объединяет локальные отслеживания в глобальное решение, что существенно сокращает общее время вычислений и повышает производительность системы в задачах трехмерного отслеживания.
Дальнейшие исследования направлены на расширение возможностей разработанной системы отслеживания в условиях более сложных сцен, характеризующихся повышенной плотностью объектов и разнообразными текстурами. Особое внимание будет уделено разработке новых алгоритмов динамического отслеживания, способных эффективно справляться с быстрыми и непредсказуемыми движениями объектов в реальном времени. Планируется внедрение методов, позволяющих прогнозировать траектории движения и адаптироваться к внезапным изменениям в поведении отслеживаемых объектов, что критически важно для применения в робототехнике и системах дополненной реальности. Ожидается, что эти усовершенствования значительно повысят надежность и точность отслеживания в сложных условиях, открывая новые возможности для интерактивных приложений и автономных систем.
Работа, представленная в статье, демонстрирует стремление к точному отслеживанию движения в трехмерном пространстве, что, впрочем, не является чем-то новым под солнцем. Авторы предлагают метод отвязки движения камеры от движения объектов, используя систему координат, привязанную к миру. И это, конечно, красиво, но всегда стоит помнить, что даже самая элегантная теория рано или поздно столкнется с суровой реальностью продакшена. Как заметил Эндрю Ын: «Самый важный навык в машинном обучении — это не умение обучать модели, а умение собирать и очищать данные». В данном случае, плотный трекинг почти всех пикселей — это хорошо, но как эта система поведет себя на видео с плохим освещением или быстрым движением? Это всегда нужно проверять.
Куда же всё это ведёт?
Представленная работа, безусловно, элегантна в своей попытке отделить движение камеры от движения объектов в трехмерном пространстве. Однако, как показывает опыт, любая «плотная» реконструкция неизбежно сталкивается с проблемой шума и неопределенности. Если система стабильно «падает» на сложных сценах, значит, она хотя бы последовательна в своей неспособности справиться с реальностью. В конечном итоге, всегда найдется текстура, которая сломает оптический поток, и освещение, которое сведет на нет все аккуратные оценки.
Вместо того чтобы гнаться за «полнотой» отслеживания каждого пикселя, возможно, стоит сосредоточиться на надежности отслеживания значимых объектов. Попытки создать «мироцентрированную» систему координат звучат красиво, но напоминают строительство замка на песке. Будущие исследования, вероятно, будут направлены на интеграцию с другими сенсорами — лидарами, радарами — чтобы хотя бы частично компенсировать неизбежные ошибки монокулярной системы. Иначе, мы просто пишем код — оставляем комментарии будущим археологам, которые будут удивляться нашей наивности.
«Облачно-нативные» решения для плотного 3D-отслеживания, несомненно, появятся, но это будет то же самое, только дороже. Настоящий прогресс, как всегда, будет заключаться в более эффективных алгоритмах фильтрации и, возможно, в признании того, что идеального решения не существует. И это, пожалуй, самое реалистичное предсказание.
Оригинал статьи: https://arxiv.org/pdf/2512.08358.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Функциональные поля и модули Дринфельда: новый взгляд на арифметику
- Квантовая самовнимательность на службе у поиска оптимальных схем
- Квантовый Борьба: Китай и США на Передовой
- Квантовые нейросети на службе нефтегазовых месторождений
- Интеллектуальная маршрутизация в коллаборации языковых моделей
- Квантовый скачок: от лаборатории к рынку
2025-12-10 16:10