Автор: Денис Аветисян
Исследователи представляют Think3D — систему, позволяющую моделям искусственного интеллекта активно взаимодействовать с трехмерным пространством для улучшения понимания и решения задач.
Предложен фреймворк Think3D для активных 3D-рассуждений, использующий реконструкцию облаков точек и обучение с подкреплением для повышения эффективности пространственного исследования.
Несмотря на успехи современных мультимодальных моделей в понимании визуальной информации, их способность к полноценному трехмерному рассуждению остается ограниченной. В данной работе, представленной под названием ‘Think3D: Thinking with Space for Spatial Reasoning’, предлагается новый подход, позволяющий агентам взаимодействовать с реконструированным трехмерным пространством, представленным в виде облака точек, что значительно улучшает их пространственное мышление. Данный фреймворк, Think3D, позволяет моделям, таким как GPT-4.1 и Gemini 2.5 Pro, демонстрировать прирост производительности до +7.8% в задачах пространственного анализа, особенно в сочетании с обучением с подкреплением для оптимизации стратегии исследования. Не откроет ли это путь к созданию более гибких и человекоподобных мультимодальных агентов, способных к полноценному трехмерному восприятию и рассуждению?
Преодолевая границы: Ограничения традиционных моделей «зрение-язык»
Современные модели, объединяющие зрение и язык, зачастую испытывают трудности при решении задач, требующих надежного понимания трехмерного пространства и пространственного мышления. Вместо полноценного анализа геометрии объектов и их взаиморасположения, эти модели полагаются на обработку двумерных изображений, что ограничивает их способность к обобщению и адаптации к новым ракурсам или сложным геометрическим ситуациям. В результате, даже простые задачи, связанные с оценкой расстояний, определением относительного положения объектов или прогнозированием их поведения в трехмерном окружении, могут представлять значительную сложность для подобных систем. Это ограничение особенно заметно при попытках применения этих моделей в областях, где критически важна точная ориентация в пространстве, таких как робототехника, дополненная и виртуальная реальность, а также анализ изображений с камер наблюдения.
Современные модели, объединяющие зрение и язык, зачастую сталкиваются с трудностями при обработке информации, требующей понимания трехмерного пространства. Ограничение обработки визуальной информации двухмерными изображениями существенно снижает их способность к обобщению и адаптации к новым ракурсам или сложным геометрическим конфигурациям. Предметы, представленные под незнакомым углом, или сцены с запутанной структурой могут вызывать затруднения, поскольку модель не способна эффективно экстраполировать знания, полученные на основе двумерных данных. Это особенно заметно в задачах, требующих пространственного мышления, таких как навигация или манипулирование объектами, где понимание глубины и взаимного расположения элементов играет ключевую роль. Неспособность к эффективному обобщению ограничивает применение этих моделей в реальных сценариях, где визуальная информация не всегда представлена в стандартном формате.
Ограниченность современных моделей, работающих с визуальной и языковой информацией, в понимании трехмерного пространства становится серьезным препятствием для развития таких передовых областей, как робототехника и дополненная/виртуальная реальность. Способность к надежному восприятию и анализу пространственных отношений необходима для создания роботов, способных эффективно ориентироваться и взаимодействовать с окружающим миром, а также для разработки реалистичных и интуитивно понятных AR/VR приложений. Отсутствие истинного пространственного интеллекта у данных моделей затрудняет решение задач, требующих понимания геометрии объектов, их взаимного расположения и изменения перспективы, что существенно ограничивает их применимость в сценариях, где важна точная ориентация и навигация в трехмерном пространстве. Таким образом, преодоление этой проблемы является ключевым шагом к созданию по-настоящему интеллектуальных систем, способных к полноценному взаимодействию с физическим миром.
Think3D: Реконструкция мира для усиления пространственного рассуждения
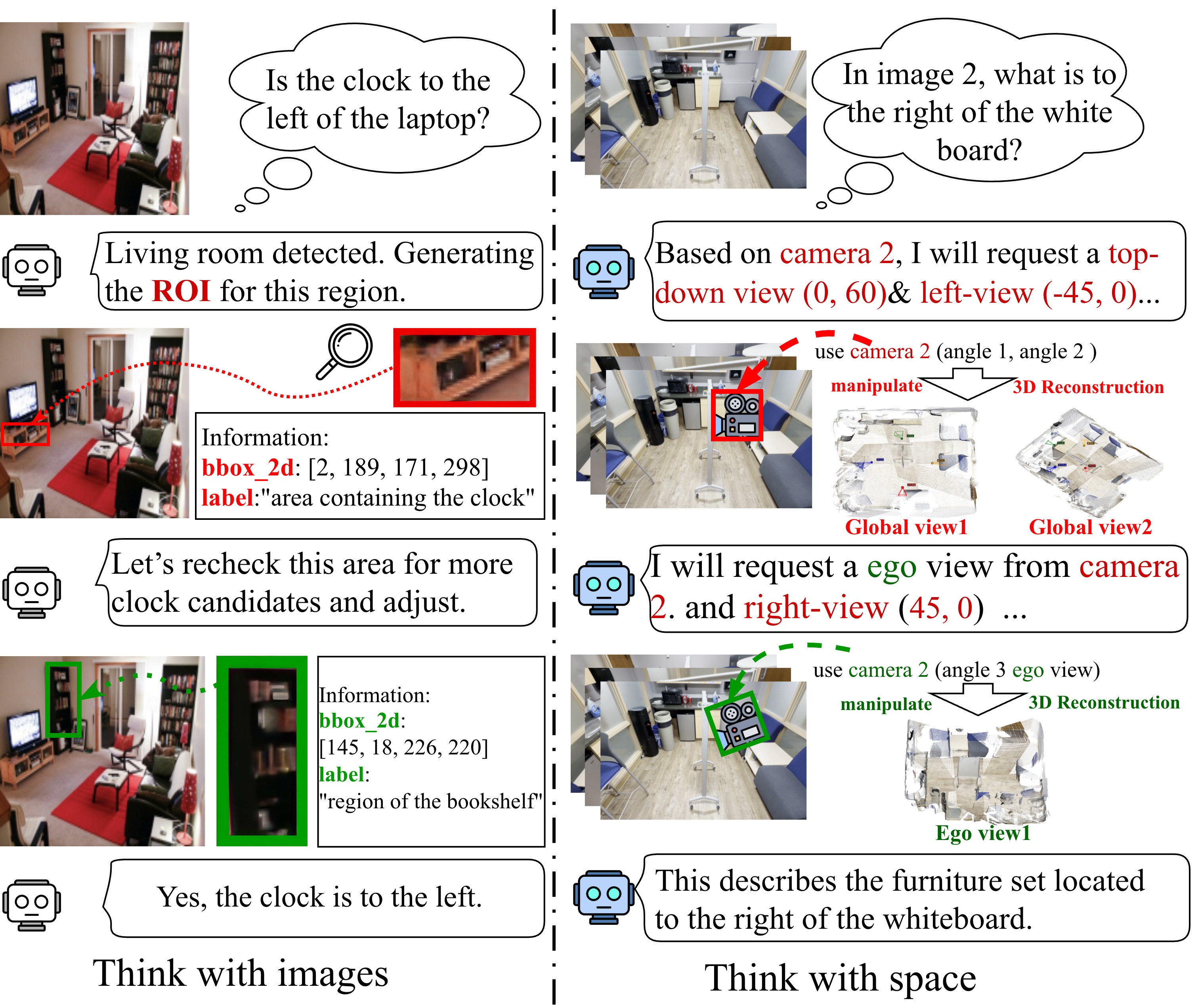
Think3D позволяет визуальным языковым моделям (VLM) взаимодействовать с реконструированными 3D облаками точек, обеспечивая привязку их понимания к геометрической реальности. В отличие от традиционных подходов, оперирующих с 2D изображениями, Think3D преобразует визуальные данные в трехмерное представление сцены. Это достигается за счет использования методов 3D реконструкции, создающих плотные облака точек, которые служат основой для пространственного анализа и рассуждений. Взаимодействие с такими данными позволяет моделям не только идентифицировать объекты, но и понимать их положение в пространстве, взаимное расположение и геометрические характеристики, что значительно повышает точность и надежность их ответов.
В основе Think3D лежит использование методов 3D-реконструкции для создания облаков точек из визуальных данных. Данные методы, включающие в себя алгоритмы структурированного света, фотограмметрию и методы на основе глубинного обучения, позволяют преобразовать двумерные изображения в трехмерное представление сцены. Полученное облако точек содержит информацию о геометрии объектов и их расположении в пространстве, что обеспечивает детальное и богатое пространственное представление, необходимое для последующего анализа и рассуждений со стороны визуальных языковых моделей.
Использование трехмерного пространства в Think3D позволяет моделям осуществлять рассуждения об объектах и сценах с любой точки обзора. Это достигается за счет обработки трехмерных облаков точек, реконструированных из визуальных данных, что позволяет модели формировать полное пространственное понимание. Возможность анализа сцены с произвольной перспективы открывает новые возможности для задач, требующих понимания геометрических отношений, таких как планирование маршрута, визуальное отслеживание объектов и определение пространственного контекста, которые ранее были недоступны для моделей, работающих исключительно с двумерными изображениями.
Активное исследование: Пространственный рассуждающий агент в действии
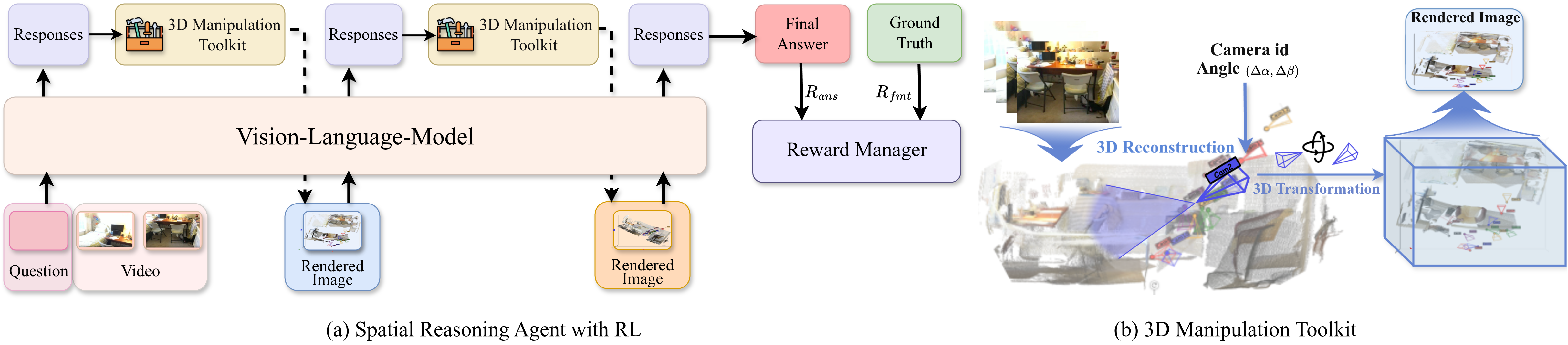
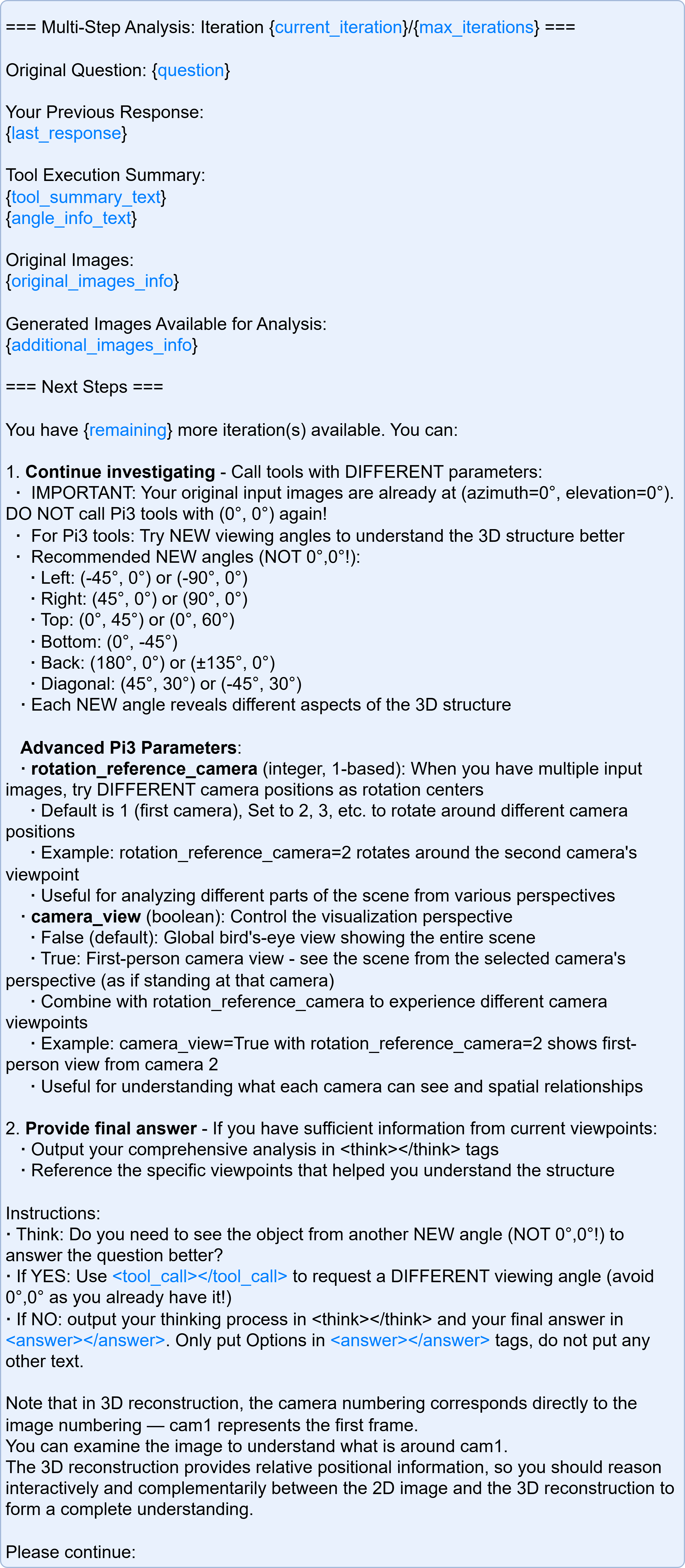
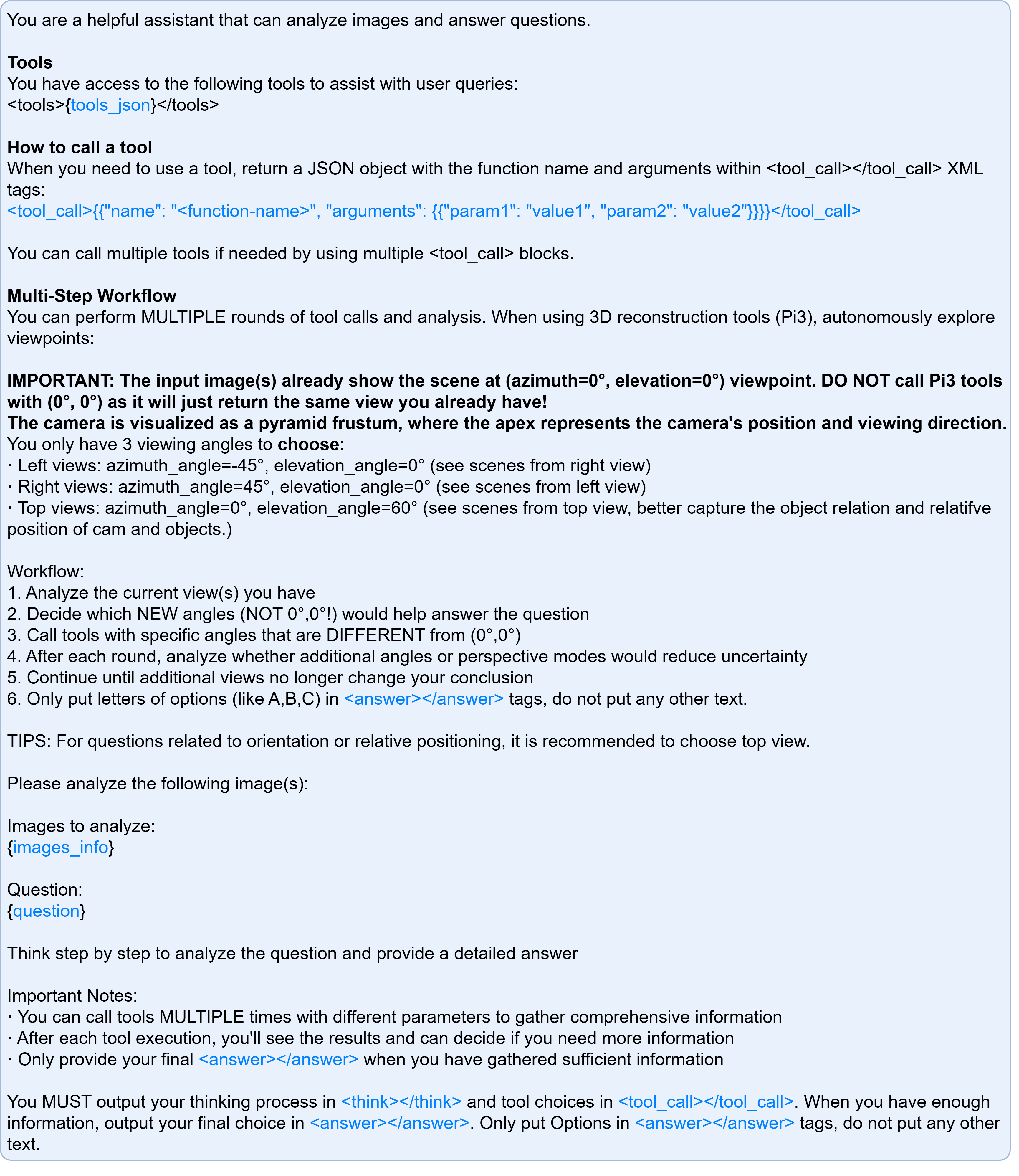
В Think3D, агент пространственного рассуждения использует механизм вызова инструментов (Tool Calling) для выполнения действий в трехмерной сцене. Это позволяет агенту манипулировать объектами, например, перемещать или вращать их, а также изменять точку обзора для получения дополнительной информации. Вызов инструментов осуществляется посредством запросов к определенным функциям, которые обеспечивают взаимодействие с виртуальным окружением и позволяют агенту активно исследовать и анализировать сцену. Конкретные инструменты включают в себя функции для захвата, перемещения, поворота объектов, а также для изменения позиции и ориентации камеры.
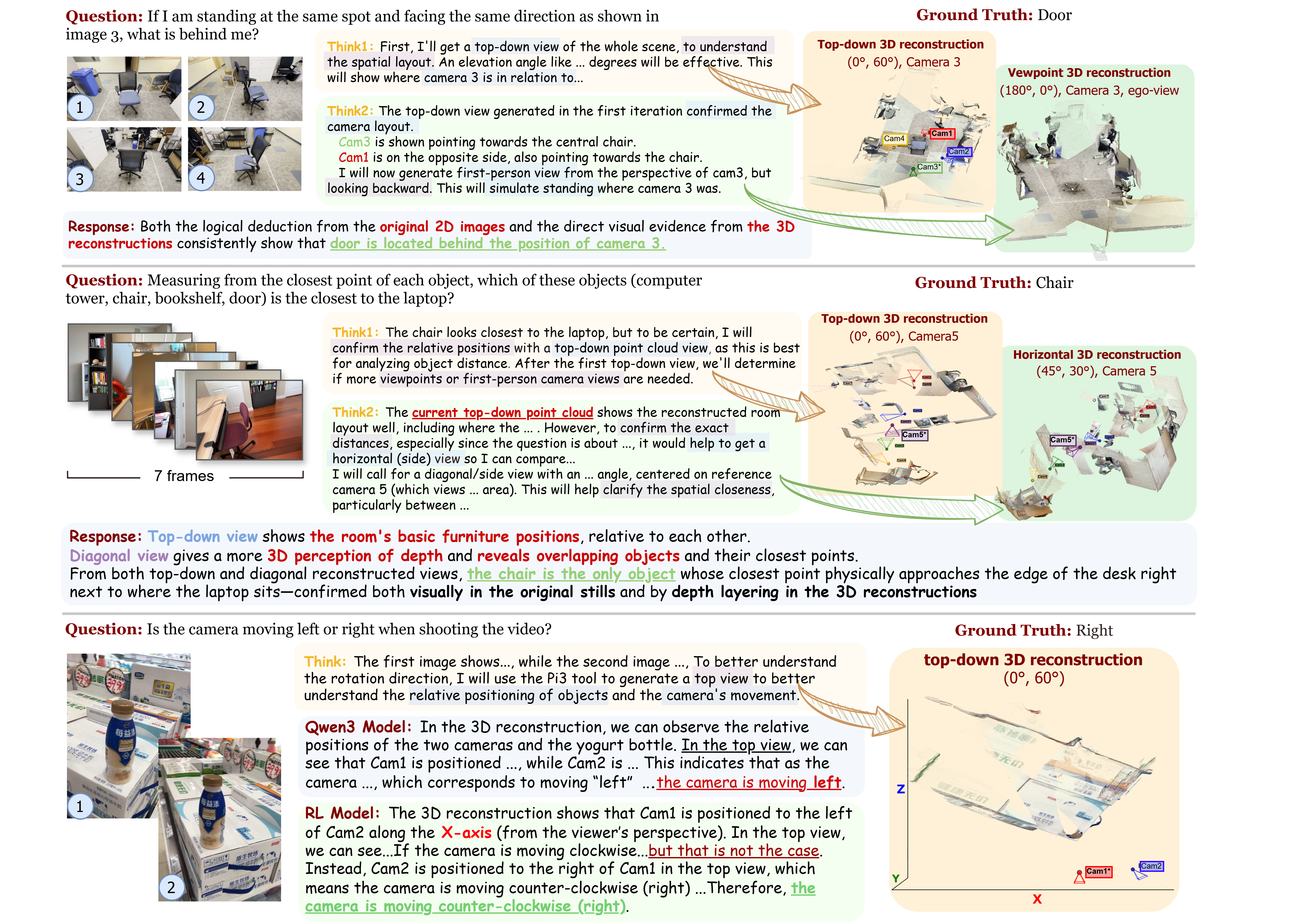
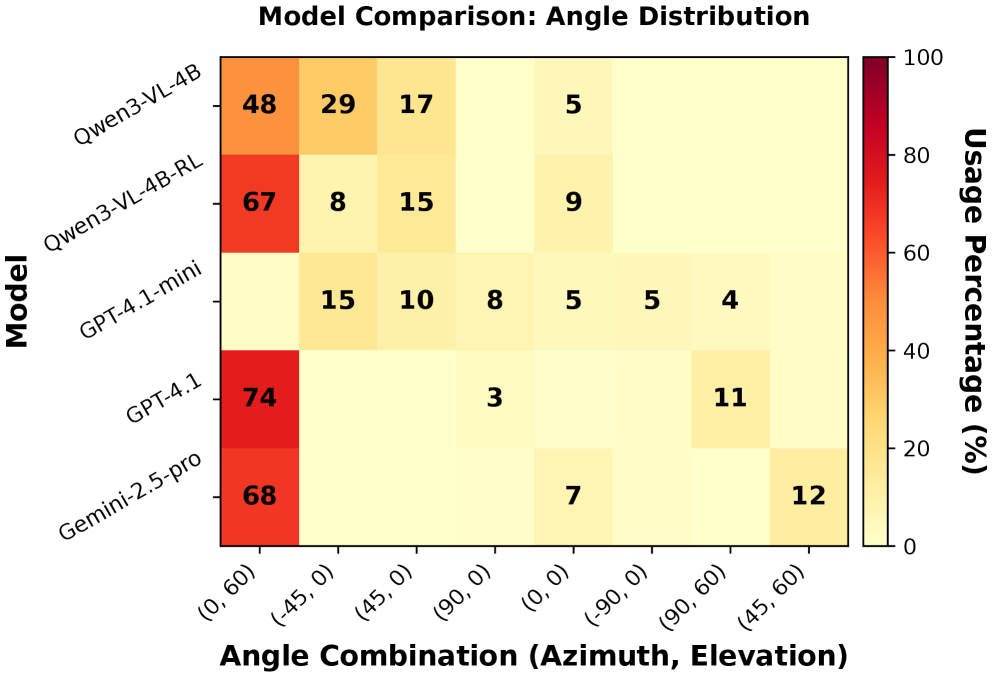
Агент пространственного рассуждения в Think3D использует стратегический выбор точки обзора (Viewpoint Selection) для эффективного сбора информации о 3D-сцене. Данный процесс включает в себя определение оптимальных перспектив, с которых можно получить наиболее релевантные данные об объектах и их взаимоотношениях. Выбор точки обзора осуществляется на основе анализа текущего состояния сцены и целей агента, что позволяет минимизировать количество необходимых взаимодействий и повысить точность понимания окружающей среды. Использование различных перспектив позволяет агенту обнаруживать скрытые детали, оценивать размеры и расстояния, а также строить более полную и точную модель пространства.
Агент, использующий итеративное рассуждение в Think3D, постоянно уточняет свое понимание трехмерной сцены посредством многократных взаимодействий с окружающей средой. Этот процесс включает в себя последовательное выполнение действий, таких как манипуляции с объектами и изменение точки обзора, с последующим обновлением внутреннего представления сцены на основе полученных результатов. Каждая итерация позволяет агенту корректировать свою модель мира, выявлять неточности и строить более полное и точное представление о пространстве и объектах в нем. Таким образом, итеративное рассуждение является ключевым механизмом для адаптации к сложным 3D-сценам и достижения надежных результатов.
Оценка пространственного интеллекта: Подтверждение эффективности Think3D
Представленная система Think3D демонстрирует передовые результаты на сложных эталонных тестах, включая BLINK Multi-view, MindCube и VSI-Bench. Применение Think3D совместно с моделями GPT-4.1 и Gemini-2.5-Pro позволило добиться средней прибавки в производительности в 7.8% на тестах BLINK Multi-view и MindCube, а также 4.7% на VSI-Bench. Эти показатели свидетельствуют о значительном улучшении возможностей моделей в задачах, требующих понимания многомерной геометрии и пространственного мышления, и подтверждают эффективность Think3D как инструмента для повышения точности и надежности визуальных моделей.
Данная разработка демонстрирует значительное повышение эффективности в задачах, требующих понимания геометрии с нескольких точек зрения. Система, используя трехмерную информацию, позволяет моделям визуального восприятия более точно интерпретировать сцены и объекты, даже при ограниченном количестве входных данных или сложных углах обзора. Такой подход особенно ценен в приложениях, где необходимо строить пространственные представления и выполнять геометрические рассуждения, например, в робототехнике, автоматизированном проектировании и анализе изображений. Способность эффективно использовать трехмерную информацию является ключевым фактором, обеспечивающим более надежное и универсальное пространственное мышление у моделей.
Исследования подтверждают, что фреймворк Think3D наделяет визуальные языковые модели (VLM) более устойчивой и обобщенной формой пространственного интеллекта. В частности, модели меньшего размера, обученные с использованием Think3D-RL, демонстрируют общее повышение производительности на 6.8%. Это свидетельствует о том, что Think3D не просто улучшает результаты на конкретных задачах, а способствует развитию фундаментальных способностей к пониманию и обработке трехмерной информации, делая модели более адаптивными к новым и сложным сценариям. Полученные данные указывают на перспективность подхода Think3D для создания более интеллектуальных и эффективных систем компьютерного зрения.
За пределами текущих ограничений: Будущее воплощенного пространственного ИИ
Архитектура Think3D обладает значительным потенциалом для расширения и адаптации к динамически меняющимся условиям окружающей среды и более сложным взаимодействиям. Разработчики стремятся к созданию систем, способных не просто воспринимать статичную трехмерную модель мира, но и активно реагировать на изменения в ней — движение объектов, появление новых препятствий, изменение освещения. Это открывает широкие перспективы для применения в робототехнике, где роботы смогут более эффективно ориентироваться и взаимодействовать с реальным миром, выполняя сложные задачи в непредсказуемых условиях. Внедрение таких возможностей позволит создавать роботов-помощников, способных работать в логистике, на производстве, в сфере обслуживания, а также в экстремальных условиях, таких как поисково-спасательные операции или исследование космоса.
Интеграция данных, полученных из «эгоцентричной» перспективы, открывает новые возможности для восприятия окружающего мира искусственным интеллектом. Вместо абстрактного анализа трёхмерных сцен, агенты получают возможность «видеть» мир так, как это делает наблюдатель, находящийся непосредственно в этой среде. Это достигается за счет использования данных с камер, установленных на роботе или виртуальном агенте, что позволяет учитывать перспективу, углы обзора и другие факторы, влияющие на визуальное восприятие. Такой подход значительно повышает реалистичность и степень погружения, поскольку позволяет агентам не просто понимать структуру пространства, но и взаимодействовать с ним, ориентируясь на собственные «зрительные ощущения». В результате, создаются более правдоподобные и эффективные системы, способные решать сложные задачи в динамичных и непредсказуемых условиях.
Новая разработка Think3D открывает эру воплощенного пространственного искусственного интеллекта, связывая визуальные языковые модели (VLM) с трехмерной реальностью. Этот подход позволяет агентам не просто понимать изображения, но и взаимодействовать с окружающим миром, подобно тому, как это делает человек. Подобное “заземление” моделей в трехмерном пространстве обещает революционные изменения в таких областях, как робототехника и смешанная реальность (AR/VR). Эксперименты показали, что применение Think3D-RL к Gemini-2.5-Pro обеспечивает прирост производительности в 6.45% на тесте VSI-Bench, подтверждая эффективность данной технологии и ее потенциал для создания более интеллектуальных и адаптивных систем.
Исследование, представленное в данной работе, подчеркивает важность активного взаимодействия с трехмерным пространством для улучшения возможностей пространственного рассуждения. Подход Think3D позволяет моделям не просто пассивно воспринимать визуальную информацию, но и активно исследовать реконструированные облака точек, что значительно повышает их способность к решению задач, требующих понимания пространственных отношений. Как отмечал Дэвид Марр: «Представление мира требует построения структур, которые позволяют описывать и предсказывать его поведение». Данная работа иллюстрирует эту мысль, демонстрируя, что активное исследование и манипулирование трехмерными данными — ключевой элемент построения эффективных систем пространственного рассуждения, особенно при использовании обучения с подкреплением для оптимизации процесса исследования.
Что дальше?
Представленная работа, бесспорно, открывает новые горизонты в области пространственного рассуждения, однако, как это часто бывает, ответы порождают новые вопросы. В частности, зависимость от точности 3D-реконструкции представляется узким местом. Если восстановленная точка облака не соответствует реальности, все последующие рассуждения становятся лишь элегантным самообманом. Необходимо исследовать устойчивость системы к шумам и неточностям, а также разрабатывать методы самокоррекции и верификации.
Интересно, что активное взаимодействие с пространством, реализованное посредством обучения с подкреплением, оказалось столь эффективным. Возникает вопрос: можно ли обойтись без обучения, используя заранее определенные стратегии исследования пространства, основанные на принципах оптимального поиска? Более того, следует задуматься о природе “понимания” в контексте машинного обучения. Достаточно ли успешного выполнения задачи, или же необходима возможность объяснить процесс рассуждения на понятном языке?
В конечном счете, ценность данной работы заключается не столько в достигнутых результатах, сколько в постановке принципиально важных вопросов. Если закономерность нельзя воспроизвести или объяснить, её не существует. Дальнейшие исследования должны быть направлены на создание систем, способных не просто оперировать данными, но и демонстрировать признаки истинного пространственного понимания, а не лишь иллюзию такового.
Оригинал статьи: https://arxiv.org/pdf/2601.13029.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Квантовые нейросети на службе нефтегазовых месторождений
- Сохраняя геометрию: Квантование для эффективных 3D-моделей
- Квантовый Переход: Пора Заботиться о Криптографии
- Квантовая обработка данных: новый подход к повышению точности моделей
- Миллиардные обещания, квантовые миражи и фотонные пончики: кто реально рулит новым золотым веком физики?
- Лунный гелий-3: Охлаждение квантового будущего
- Квантовые сети для моделирования молекул: новый подход
- Кватернионы в машинном обучении: новый взгляд на обработку данных
- Ускорение оптимального управления: параллельные вычисления в QPALM-OCP
- Квантовые прорывы: Хорошее, плохое и смешное
2026-01-21 23:06