Автор: Денис Аветисян
В статье представлена инновационная система, позволяющая роботам эффективно исследовать сложные пространства, сочетая стратегическое планирование и оперативное принятие решений.
Предложен фреймворк FARE, использующий большие языковые модели и графовое рассуждение для построения и обновления графа убеждений робота и оптимизации процесса автономного исследования.
Автономное исследование сложных сред роботами часто сталкивается с необходимостью баланса между глобальным планированием и локальным реагированием. В данной работе представлена система ‘FARE: Fast-Slow Agentic Robotic Exploration’, иерархический подход, объединяющий семантическое рассуждение на основе больших языковых моделей с обучением с подкреплением для эффективного исследования. FARE разделяет процесс принятия решений, используя LLM для разработки стратегии исследования и RL для ее реализации, что позволяет добиться значительного улучшения эффективности в симулированных и реальных условиях, включая масштабные здания размером 200m\times130m. Способна ли данная архитектура стать основой для создания действительно автономных роботов-исследователей, способных действовать в неизвестных и динамичных средах?
Разрушая Границы: Вызов Автономного Исследования
Эффективное исследование неизвестных пространств представляет собой основополагающую задачу для робототехники, требующую разработки надежных методов построения карт и определения местоположения. Успешная навигация в неизученной среде зависит от способности робота одновременно создавать точную карту окружения и точно определять собственное положение на этой карте. Это непростая задача, поскольку сенсорные данные часто зашумлены, а окружающая среда может быть динамичной и сложной. Разработка алгоритмов, способных справляться с этими трудностями, является ключом к созданию автономных роботов, способных эффективно исследовать и взаимодействовать с реальным миром, будь то исследование марсианских ландшафтов или картографирование внутренних помещений для поисково-спасательных операций. Точность и надежность этих систем напрямую влияют на способность робота планировать безопасные и эффективные маршруты, избегать препятствий и достигать поставленных целей.
Традиционные методы одновременной локализации и построения карты (SLAM), несмотря на свою эффективность в контролируемых условиях, сталкиваются с серьезными трудностями при работе в крупных и динамично меняющихся средах. Сложность заключается в экспоненциальном росте вычислительных затрат по мере увеличения размера исследуемого пространства и количества объектов в реальном времени. Каждый новый элемент требует пересчета всей карты, что приводит к замедлению работы алгоритмов и, в конечном итоге, к невозможности обработки данных в режиме реального времени. Кроме того, динамические объекты, такие как движущиеся люди или транспортные средства, вносят значительные погрешности в процесс локализации и построения карты, требуя дополнительных вычислительных ресурсов для их отслеживания и учета. Таким образом, для эффективной автономной разведки больших и непредсказуемых пространств необходимы инновационные подходы, способные преодолеть эти ограничения.
Существующие стратегии исследования окружающей среды, такие как метод поиска границ (frontier-based exploration), зачастую сталкиваются с проблемой локальных оптимумов. Это означает, что робот может зациклиться на исследовании ограниченной области, игнорируя более важные или обширные участки неизведанного пространства. В результате формируется неполная карта и снижается общая эффективность исследования. Робот, сосредоточившись на ближайших границах, упускает из виду отдаленные, но потенциально значимые зоны, что препятствует формированию всестороннего представления об окружающей среде и ограничивает возможности для полноценной навигации и выполнения задач. Преодоление этой проблемы требует разработки более совершенных алгоритмов, способных эффективно оценивать глобальную значимость различных областей и избегать застревания в локальных оптимумах.
FARE: Иерархический Фреймворк «Быстрого и Медленного» Мышления
Архитектура FAIRE представляет собой новую систему, разделяющую процесс исследования среды на два отдельных модуля: модуль глобального рассуждения (“медленное мышление”) и модуль локального принятия решений (“быстрое мышление”). Такое разделение позволяет отделить задачи долгосрочного планирования и поддержания общей картины среды от задач немедленного реагирования и навигации. Модуль глобального рассуждения отвечает за построение и поддержание глобального графа убеждений, представляющего собой структуру окружающей среды, в то время как модуль локального принятия решений использует эту информацию для оперативного выбора действий и корректировки траектории движения.
Медленный модуль обработки информации в FAIRE использует LLM-основанное рассуждение на графах для построения и поддержания Глобального Графа Убеждений, представляющего общую структуру окружающей среды. Этот граф формируется на основе анализа входных данных с использованием большой языковой модели (LLM), что позволяет выявлять и кодировать взаимосвязи между различными элементами среды. Глобальный Граф Убеждений динамически обновляется по мере получения новой информации, обеспечивая актуальное представление об окружении и позволяя системе адаптироваться к изменяющимся условиям. Структура графа включает в себя узлы, представляющие объекты и локации, и ребра, определяющие пространственные и семантические связи между ними. Использование LLM позволяет эффективно обрабатывать сложные взаимосвязи и неопределенность, что критически важно для долгосрочного планирования и навигации.
Глобальное представление, формируемое в рамках FAIRE, позволяет осуществлять планирование на длительные горизонты, поскольку оно содержит структурированную информацию об окружающей среде и ее элементах. Эта структура, реализованная в виде графа убеждений, предоставляет возможность прогнозирования последствий действий и выбора оптимальных стратегий для достижения целей. Кроме того, глобальное представление передает модулю быстрого мышления высокоуровневые пространственные характеристики, такие как взаимосвязь между объектами и общая топология среды, что позволяет ему эффективно адаптироваться к локальным изменениям и принимать обоснованные решения в реальном времени, не требуя повторного анализа всей обстановки.
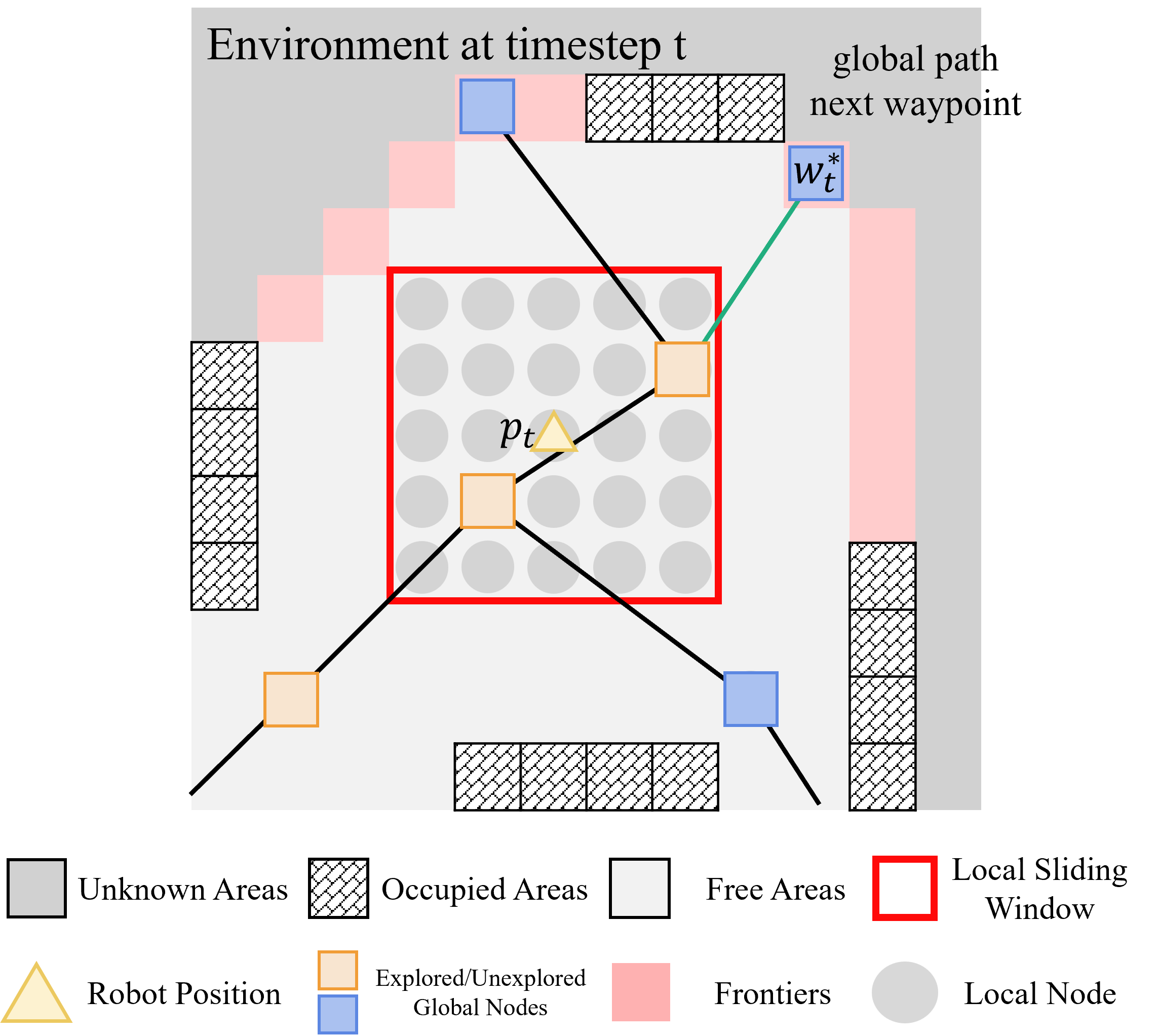
Иерархическое планирование в FAIRE обеспечивает эффективное исследование среды путем последовательного построения грубого глобального пути и его последующей детализации с помощью локальных корректировок. Первоначально, система формирует приблизительный маршрут, ориентируясь на общую структуру окружения, представленную в Глобальном Графе Убеждений. Затем, этот глобальный путь уточняется посредством локальных изменений, учитывающих непосредственное окружение и позволяющих обходить препятствия или оптимизировать траекторию. Такой подход позволяет снизить вычислительную сложность по сравнению с планированием на детальном уровне, сохраняя при этом возможность эффективного исследования больших пространств и достижения поставленных целей.
Включение Графового Рассуждения: От Оптимизации к Пониманию
Для снижения вычислительной сложности Глобального Графа Убеждений (Global Belief Graph) применяется метод обрезки на основе модульности. Данный подход предполагает выделение и сохранение только наиболее информативных структурных сообществ (communities) графа, определяемых по критериям связности и центральности узлов. Удаление менее значимых модулей позволяет уменьшить размер графа и, следовательно, снизить затраты на обработку информации без существенной потери точности представления окружающей среды. Выделение сообществ осуществляется алгоритмами обнаружения сообществ в графах, такими как Louvain или Leiden, с последующей оценкой информативности каждого модуля на основе метрик, характеризующих его вклад в общую структуру и содержание графа.
Для обеспечения контекстной осведомленности и повышения качества принимаемых решений, модуль “медленного мышления” получает на вход описание окружающей среды, представленное в виде естественного языка. Этот подход позволяет системе интерпретировать сложные сцены и взаимосвязи между объектами, выходя за рамки простой обработки сенсорных данных. Использование текстового описания позволяет модулю учитывать неявные знания об окружающей среде, а также понимать цели и намерения других агентов, что критически важно для эффективного планирования и взаимодействия в динамичных условиях. Полученное описание интегрируется с данными, хранящимися в графе убеждений робота, для формирования более полной картины мира и принятия обоснованных решений.
Модуль “медленного мышления” функционирует на базе большой языковой модели Qwen3-14B, развернутой на вычислительной платформе Jetson AGX Orin. Это позволяет роботу осуществлять сложные рассуждения непосредственно на борту, без необходимости внешней обработки данных. Qwen3-14B обеспечивает обработку и генерацию естественного языка, а Jetson AGX Orin предоставляет необходимую вычислительную мощность для работы модели в реальном времени, что критически важно для автономной работы робота и принятия решений в динамической среде.
Граф убеждений робота (Robot Belief Graph) является ключевым компонентом системы, обеспечивающим иерархическую организацию и доступ к информации об окружающей среде. Структура графа позволяет представлять объекты, их атрибуты и взаимосвязи между ними в многоуровневой форме, что облегчает поиск и обработку данных. Иерархическая организация позволяет эффективно масштабировать систему, добавляя новые объекты и связи без значительного увеличения вычислительной сложности. Данный подход позволяет роботу эффективно хранить, обновлять и использовать знания об окружающей среде для принятия обоснованных решений и выполнения задач.
Локальные Действия и Эффективная Навигация: От Планирования к Исполнению
Модуль быстрого реагирования использует обучение с подкреплением для выбора действий, опираясь на локальную информацию о карте и указания от модуля медленного анализа. В процессе обучения, агент (модуль быстрого реагирования) получает вознаграждение за действия, приближающие его к достижению целей, определенных модулем медленного анализа, что позволяет ему адаптироваться к текущей обстановке и принимать оптимальные решения в режиме реального времени. Выбор действий основан на анализе локальной карты, предоставляющей информацию о препятствиях и доступных путях, и корректируется в соответствии с долгосрочными целями, заданными модулем медленного анализа, обеспечивая согласованность действий и эффективное выполнение задач.
Интеграция следования инструкциям в функцию вознаграждения обеспечивает соответствие действий быстродействующего модуля долгосрочным целям, заданным медленнодействующим модулем. Это достигается путем включения штрафов и поощрений, связанных с соблюдением или отклонением от поставленных задач, непосредственно в процесс обучения с подкреплением. Таким образом, модуль быстрого реагирования оптимизируется не только для локальной навигации, но и для достижения глобальных целей, определенных на более высоком уровне планирования. Конкретно, функция вознаграждения учитывает прогресс в выполнении инструкций, близость к целевым точкам и соблюдение заданных ограничений, что позволяет модулю эффективно координировать свои действия с общей стратегией.
Локальный граф убеждений (Local Belief Graph) предоставляет модулю быстрого принятия решений детальное представление об окружающей обстановке в непосредственной близости. Этот граф формируется на основе данных, получаемых от сенсоров и системы локализации FastLIO2, и включает в себя информацию о расположении препятствий, свободных пространствах и вероятных положениях самого агента. Граф структурирован таким образом, чтобы обеспечить быстрый доступ к релевантным данным для планирования траектории и предотвращения столкновений, позволяя агенту эффективно ориентироваться в динамичной среде. Он обновляется в режиме реального времени, отражая изменения в окружении и обеспечивая актуальность информации для модуля быстрого принятия решений.
Система точной локализации и построения карт во время быстрого движения основана на FastLIO2, оптимизированном алгоритме обработки данных лидара. FastLIO2 использует подход на основе одометрии, сочетая информацию о перемещениях, полученную от датчиков, с данными лидара для создания и обновления карты окружения в реальном времени. Особенностью FastLIO2 является его способность эффективно обрабатывать большие объемы данных, генерируемых при высокой скорости движения, сохраняя при этом высокую точность определения местоположения и построения детальных карт. Алгоритм использует методы фильтрации и оптимизации для снижения влияния шума и погрешностей измерений, что критически важно для надежной работы в динамичных условиях.
Будущее Автономных Систем: От Исследований к Реальному Миру
Предлагаемый подход обладает значительным потенциалом для существенного расширения возможностей робототехники в разнообразных сферах применения. В частности, данная платформа может быть использована для повышения эффективности поисково-спасательных операций, позволяя роботам автономно ориентироваться в сложных и опасных условиях, а также для более детального и оперативного мониторинга окружающей среды, включая сбор данных о загрязнении или состоянии экосистем. Кроме того, система способна значительно улучшить процессы инспекции инфраструктуры, такие как проверка мостов, трубопроводов или электросетей, выявляя дефекты и предотвращая аварии с большей точностью и скоростью, чем традиционные методы.
Предстоящие исследования направлены на повышение масштабируемости и устойчивости разработанной системы, что позволит ей эффективно функционировать в более сложных и непредсказуемых условиях. Особое внимание будет уделено разработке новых методов интеграции многомодальных сенсорных данных — объединению информации, поступающей от различных датчиков, таких как камеры, лидары и тактильные сенсоры. Такой подход позволит создать более полное и точное представление об окружающей среде, значительно повышая способность робота ориентироваться и принимать обоснованные решения в реальном времени. В перспективе, это приведет к созданию роботов, способных адаптироваться к изменяющимся условиям и эффективно решать широкий спектр задач в различных областях, включая исследования, спасательные операции и промышленную автоматизацию.
Представляется будущее, в котором роботы смогут автономно исследовать и понимать сложные среды с невиданной ранее эффективностью и адаптивностью. Эта возможность достигается благодаря объединению сильных сторон графового рассуждения и обучения с подкреплением. Графовое рассуждение позволяет роботам строить и использовать структурированное представление окружающей среды, эффективно планируя маршруты и предвидя последствия своих действий. В свою очередь, обучение с подкреплением дает возможность адаптироваться к динамически меняющимся условиям, оптимизируя поведение на основе получаемого опыта. Сочетание этих подходов позволяет создавать роботов, способных не просто перемещаться в пространстве, но и активно понимать его структуру, эффективно решать поставленные задачи и быстро приспосабливаться к новым вызовам, открывая перспективы для применения в самых разных областях — от поисково-спасательных операций до мониторинга окружающей среды и инспекции инфраструктуры.
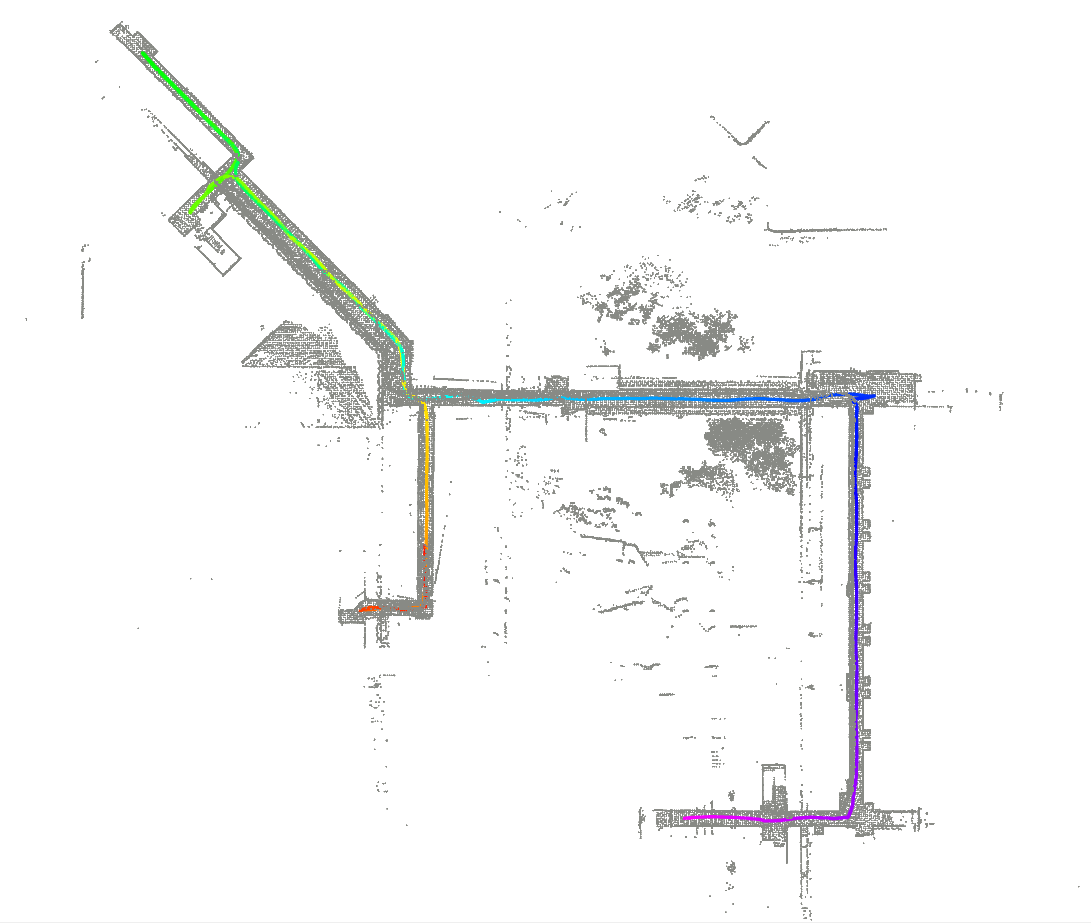
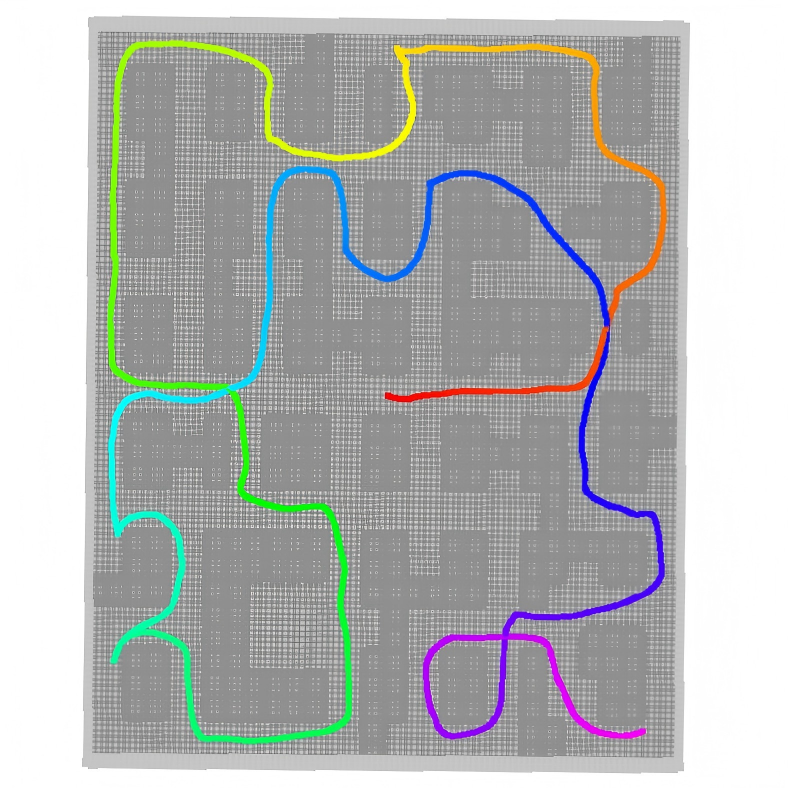
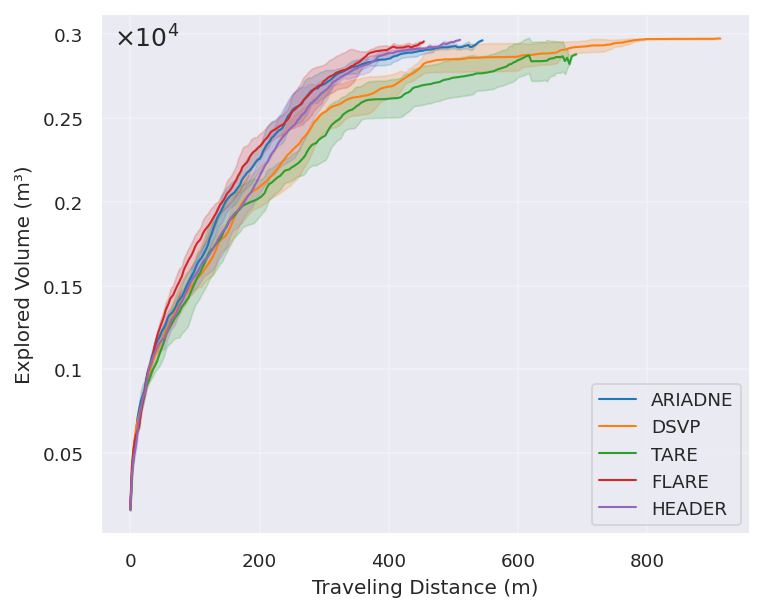
Разработанная FARE-структура демонстрирует значительное повышение эффективности исследования окружающей среды, позволяя роботам преодолевать меньшие расстояния и завершать задачи за более короткое время. Проведенные испытания в сложных условиях, таких как лесные массивы и складские помещения, показали превосходство FARE над базовыми методами, что подтверждено данными, представленными на рисунке 2 и в таблице 1. Это указывает на потенциал системы для оптимизации автономной навигации и снижения энергопотребления роботов при выполнении задач в разнообразных и труднодоступных местах, открывая новые возможности для применения в поисково-спасательных операциях и мониторинге инфраструктуры.
Исследование демонстрирует подход к автономному исследованию, разделяющий глобальное стратегическое планирование и локальное принятие решений. Этот метод, подобно тщательно продуманной архитектуре, позволяет роботу ориентироваться в сложных условиях. Как заметила Барбара Лисков: «Программы должны быть спроектированы так, чтобы изменения в одной части не влияли на другие». Это наблюдение напрямую перекликается с принципом модульности, лежащим в основе FARE, где чёткое разделение задач обеспечивает устойчивость и адаптивность системы к новым вызовам. Граф убеждений робота, ключевой элемент системы, становится своеобразной «картой» реальности, которую робот постоянно уточняет и использует для навигации.
Что дальше?
Представленная система FARE, безусловно, демонстрирует возможность разделения глобального планирования и локального принятия решений для автономного робота. Однако, стоит задаться вопросом: что произойдет, если нарушить эту строгую иерархию? Возможно ли создание системы, где «стратег» и «исполнитель» не разделены, а представляют собой единый, самообучающийся континуум? Упор на графовое мышление, хотя и эффективен, все же требует предварительного построения «графа убеждений». Что если робот способен строить карту мира не из зафиксированных данных SLAM, а непосредственно из потока сенсорной информации, предвосхищая изменения и адаптируясь к неполноте информации?
Использование больших языковых моделей открывает двери к пониманию окружающей среды на уровне семантики, но неизбежно наталкивается на проблему «галлюцинаций» и неточностей. Если робот «заблуждается» в интерпретации, какие механизмы самокоррекции и верификации должны быть внедрены? А что если ошибка в интерпретации станет не отклонением, а источником новых, неожиданных стратегий исследования?
В конечном счете, FARE — это лишь еще один шаг на пути к созданию действительно автономного агента. Истинный прорыв, вероятно, потребует не просто улучшения существующих алгоритмов, а переосмысления самой концепции «исследования». Что если цель не в составлении точной карты, а в создании системы, способной эффективно функционировать в условиях полной неопределенности, извлекая пользу из хаоса?
Оригинал статьи: https://arxiv.org/pdf/2601.14681.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Квантовые нейросети на службе нефтегазовых месторождений
- Функциональные поля и модули Дринфельда: новый взгляд на арифметику
- Квантовая криптография: от теории к практике
- Квантовые прорывы: Хорошее, плохое и смешное
- Робот, который видит, понимает и действует: новая эра общего назначения
- Квантовые вычисления: от шифрования армагеддона до диверсантов космических лучей — что дальше?
- Миллиардные обещания, квантовые миражи и фотонные пончики: кто реально рулит новым золотым веком физики?
- Квантовые сети для моделирования молекул: новый подход
- Кватернионы в машинном обучении: новый взгляд на обработку данных
- Лунный гелий-3: Охлаждение квантового будущего
2026-01-22 09:46