Автор: Денис Аветисян
Новый подход позволяет роботам самостоятельно планировать и выполнять сложные научные задачи, преодолевая ограничения в восприятии и планировании действий.
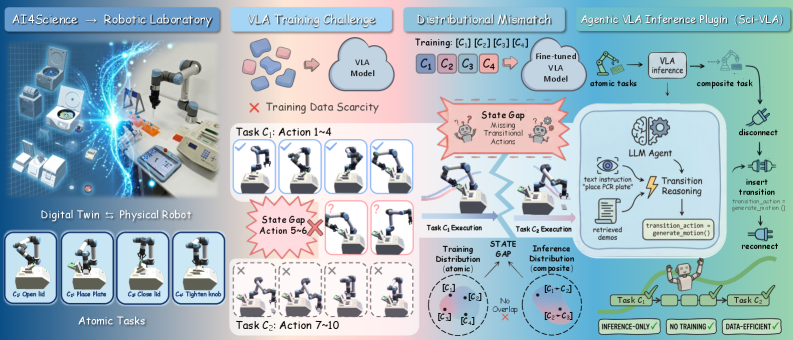
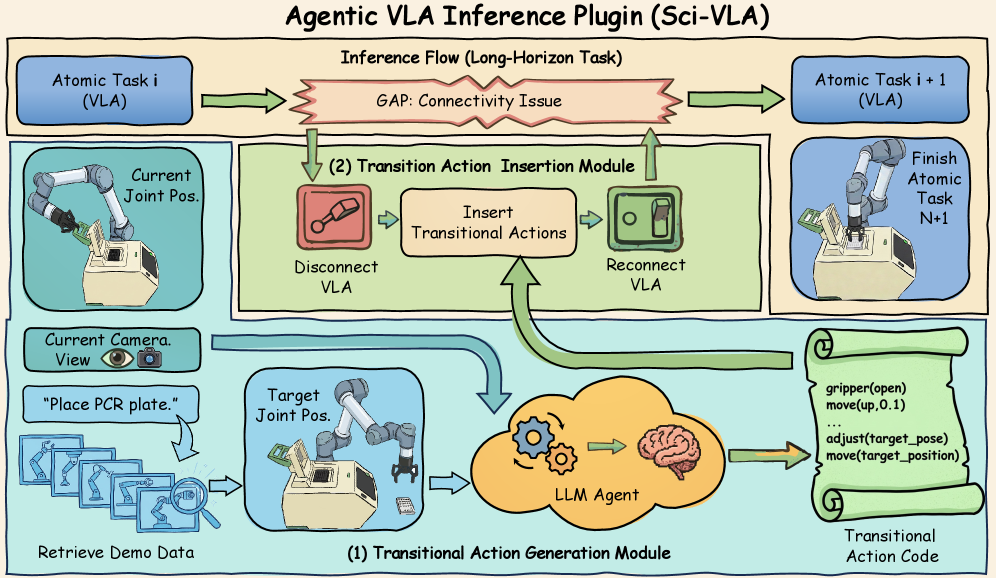
Разработан агентский модуль для роботов, использующий Vision-Language-Action (VLA) модели, позволяющий им успешно справляться с долгосрочными задачами в научных лабораториях, решая проблему ‘разрыва состояний’.
Несмотря на значительный прогресс в области робототехники, автоматизация сложных научных экспериментов остается сложной задачей из-за необходимости выполнения многоэтапных процедур. В работе ‘Sci-VLA: Agentic VLA Inference Plugin for Long-Horizon Tasks in Scientific Experiments’ предлагается решение этой проблемы — плагин агентного вывода для моделей «видение-язык-действие» (VLA), который позволяет преодолеть «разрыв состояний» между отдельными действиями и комплексными протоколами. Предложенный подход, основанный на использовании LLM-агента, генерирует промежуточные действия, необходимые для успешного выполнения длительных научных задач, без дополнительного обучения модели VLA. Открывает ли это путь к созданию полностью автономных научных лабораторий, способных самостоятельно проводить исследования и открывать новые знания?
Сложность как Препятствие: Вызовы Долгосрочных Задач
Традиционные роботизированные системы сталкиваются с серьезными трудностями при выполнении сложных, многоступенчатых задач, что обусловлено кумулятивной ошибкой и ограничениями в планировании. Неизбежные погрешности, возникающие на каждом этапе выполнения, накапливаются и приводят к значительному отклонению от запланированной траектории, особенно при длительных и последовательных действиях. Более того, существующие алгоритмы планирования часто не способны эффективно учитывать все возможные варианты развития событий и адаптироваться к непредсказуемым изменениям в окружающей среде. В результате, робот может столкнуться с ситуацией, когда дальнейшее выполнение задачи становится невозможным или требует значительных корректировок, что снижает общую эффективность и надежность системы. Данная проблема особенно актуальна в задачах, требующих высокой точности и координации действий на протяжении длительного времени.
Особую сложность для современных робототехнических систем представляют задачи, требующие продолжительных и скоординированных действий на протяжении длительного времени — так называемые задачи с “длинным горизонтом”. В отличие от простых, одношаговых операций, выполнение таких задач подразумевает последовательное и точное выполнение множества взаимосвязанных действий, где даже незначительная ошибка на ранних этапах может привести к существенным отклонениям и, в конечном итоге, к провалу всей операции. Представьте, например, приготовление сложного блюда или сборку сложного механизма — каждый этап требует точности и согласованности с предыдущими и последующими шагами. Подобные задачи требуют не только способности к планированию, но и к адаптации к непредвиденным обстоятельствам и поддержанию стабильной производительности на протяжении всего процесса, что представляет серьезный вызов для существующих алгоритмов и систем управления.
Традиционные методы обучения с подкреплением, несмотря на свою эффективность в простых задачах, часто демонстрируют хрупкость и неэффективность применительно к сложным, многоступенчатым сценариям. Основная проблема заключается в кумулятивном характере ошибок: даже незначительные неточности на каждом этапе могут привести к существенному отклонению от желаемого результата по мере увеличения продолжительности задачи. Кроме того, алгоритмы обучения с подкреплением требуют огромного количества данных для обучения в сложных средах, что делает их применение трудоемким и ресурсозатратным. В результате, существующие подходы часто оказываются неспособными к обобщению на новые, незнакомые ситуации, ограничивая их практическое применение в реальных условиях, где долгосрочное планирование и адаптация к изменяющимся обстоятельствам являются ключевыми.
Существенная проблема для современных моделей, объединяющих компьютерное зрение, обработку естественного языка и управление действиями, заключается в так называемом “разрыве состояний” — резких изменениях в визуальном восприятии и последовательности действий. Данный феномен возникает, когда переход между этапами задачи приводит к значительному скачку в наблюдаемой среде, что затрудняет для модели корректное прогнозирование и планирование дальнейших действий. Например, при сборке сложного объекта изменение положения деталей или угла обзора камеры может вызвать значительное расхождение между ожидаемым и фактическим визуальным представлением, приводя к ошибкам в выполнении задачи. Преодоление этого “разрыва состояний” требует от моделей способности к более надежному обобщению и адаптации к непредсказуемым изменениям в окружающей среде, что является ключевым вызовом в разработке систем, способных к выполнению сложных, долгосрочных задач.

LLM-Агент как Мост: Преодоление Разрыва в Планировании
Метод агентного вывода на основе больших языковых моделей (LLM), таких как GPT-5.2, предоставляет эффективное решение за счет использования их способности к рассуждению. GPT-5.2, обладая развитыми возможностями понимания естественного языка и генерации текста, позволяет системе анализировать сложные задачи и разрабатывать последовательность действий для их решения. Это достигается за счет использования LLM не только для непосредственного выполнения действий, но и для планирования и оценки различных стратегий, что повышает надежность и эффективность системы в сложных сценариях. Способность модели к обобщению и адаптации к новым ситуациям является ключевым фактором повышения производительности.
Метод, основанный на генерации “Переходных Действий” (Transitional Actions), предполагает создание промежуточных шагов, облегчающих переход между элементарными задачами. Вместо непосредственного выполнения сложной операции, система сначала генерирует последовательность вспомогательных действий, подготавливающих выполнение основной задачи. Эти действия служат для смягчения разрыва между отдельными этапами и обеспечивают более плавный и последовательный процесс выполнения, что особенно важно для задач, требующих долгосрочного планирования и взаимодействия с окружающей средой. Генерация таких действий позволяет системе более эффективно справляться со сложностями, возникающими при переходе от одной элементарной операции к другой.
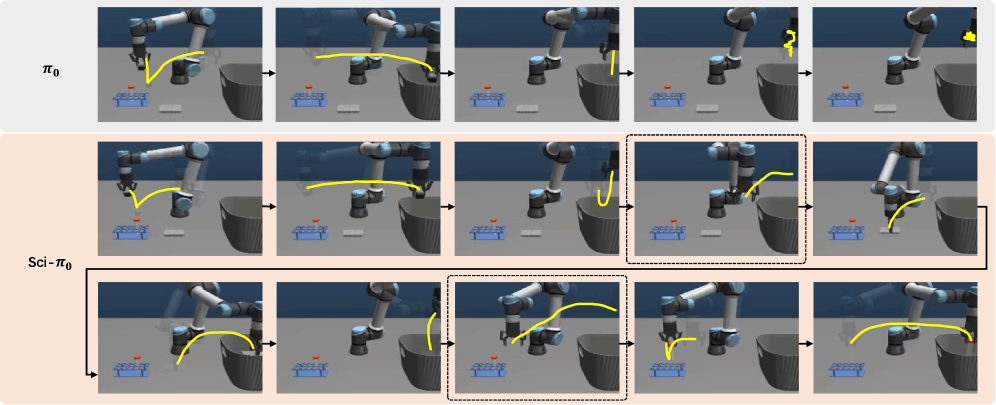
Внедрение промежуточных, выводимых действий позволяет снизить проблему «разрыва состояний» (State Gap) в задачах с длинным горизонтом планирования. Данный подход позволяет системе более эффективно переходить между атомарными операциями, что приводит к повышению общей производительности. Согласно результатам тестирования на различных моделях Vision-Language-Action (VLA), использование выводимых промежуточных действий демонстрирует приблизительное 42%-ное увеличение успешности выполнения задач по сравнению со стандартными подходами.
Подход, основанный на использовании больших языковых моделей, расширяет возможности существующих моделей «Зрение-Язык-Действие» (Vision-Language-Action, VLA) за счет предоставления более надежного механизма планирования действий. Традиционные VLA модели часто испытывают трудности с комплексными задачами, требующими последовательного выполнения нескольких шагов. Предлагаемый метод обеспечивает улучшенное планирование за счет способности модели генерировать и оценивать промежуточные действия, что позволяет более эффективно преодолевать разрывы в последовательности действий и повышать общую производительность системы в задачах с горизонтом планирования. Это позволяет VLA моделям решать более сложные задачи и достигать более высоких показателей успешности.
Виртуальные Лаборатории: Пространство для Экспериментов и Оптимизации
Система “Autobio” использует концепцию “цифрового двойника” для создания виртуальной лабораторной среды, предназначенной для тестирования и доработки роботизированных систем. Этот цифровой двойник представляет собой программную модель, имитирующую физическое оборудование и окружение реальной лаборатории. Такая виртуализация позволяет проводить обширные эксперименты и итерации проектирования без необходимости физического прототипирования, снижая затраты и время разработки. Цифровой двойник обеспечивает возможность моделирования различных сценариев и условий, а также автоматизированного сбора данных для анализа и оптимизации производительности роботизированных систем в контролируемой виртуальной среде.
Возможность моделирования позволяет проводить быструю разработку и оптимизацию “переходных действий” (Transitional Actions) без ограничений, связанных с физическим экспериментированием. Это достигается за счет создания виртуальной среды, где можно тестировать и совершенствовать алгоритмы управления роботами, варьируя параметры и сценарии без необходимости сборки и настройки реального оборудования. Такой подход значительно сокращает время и стоимость разработки, позволяя оперативно выявлять и устранять недостатки в логике выполнения задач, а также исследовать широкий спектр возможных стратегий управления в безопасной и контролируемой среде.
Авторегрессионные модели виртуальных лабораторий (VLA) и диффузионные модели обеспечивают предсказание действий, являясь ключевым компонентом эффективности системы. Авторегрессионные модели прогнозируют последовательные действия, основываясь на предыдущих состояниях и выполненных операциях, что позволяет системе планировать дальнейшие шаги. Диффузионные модели, в свою очередь, генерируют вероятные траектории действий, учитывая шум и неопределенность в окружающей среде. Комбинация этих подходов позволяет системе не только предсказывать наиболее вероятные действия, но и адаптироваться к изменяющимся условиям, повышая надежность и точность выполнения задач в виртуальной среде. Использование данных методов позволяет оптимизировать процесс обучения и снизить потребность в дорогостоящих и трудоемких физических экспериментах.
Модель «Зрение-Язык-Действие» (Vision-Language-Action Model) является ключевым компонентом навигации в виртуальной лаборатории, поскольку обеспечивает обработку визуальной информации, лингвистических инструкций и преобразование их в последовательности действий. Интеграция этих трех модальностей позволяет системе понимать цели задачи, интерпретировать визуальное окружение и планировать необходимые манипуляции для достижения результата. Визуальный ввод, поступающий из симуляции, анализируется для определения положения объектов и текущего состояния среды. Лингвистические команды, сформулированные на естественном языке, преобразуются в структурированные представления, определяющие желаемое поведение робота. Затем, на основе анализа визуальной информации и лингвистических инструкций, система генерирует последовательность действий, необходимых для выполнения поставленной задачи в симулированной среде.
В ходе реальных экспериментов продемонстрирована успешная работа системы управления термоциклером. Визуальное подтверждение успешного выполнения последовательности задач C.1 -> C.2, включающей настройку температуры и времени, было задокументировано. Данный результат подтверждает работоспособность разработанной системы в физической среде и служит основой для дальнейшей оптимизации и расширения функциональности, а также для проверки корректности симуляций в виртуальной лаборатории.
AI4Science: К Автономным Научным Открытиям
Современный прорыв в научном исследовании обусловлен возникновением парадигмы AI4Science, в основе которой лежит синергия нескольких передовых технологий. Ключевую роль здесь играют большие языковые модели (LLM), способные к логическому выводу и планированию экспериментов, виртуальные лабораторные симуляции, позволяющие безопасно и эффективно тестировать гипотезы, и продвинутые модели «Зрение-Язык-Действие» (VLA), обеспечивающие интерпретацию визуальных данных и управление лабораторным оборудованием. Сочетание этих компонентов позволяет создавать автономные системы, способные самостоятельно формулировать научные вопросы, разрабатывать экспериментальные протоколы, анализировать результаты и делать выводы, существенно ускоряя процесс научных открытий и открывая новые горизонты в различных областях знания.
Новый подход, известный как AI4Science, открывает возможности для автоматизации значительной части научного экспериментального процесса. Исследования показывают, что благодаря сочетанию больших языковых моделей, виртуального моделирования лабораторий и передовых моделей, объединяющих зрение, язык и действия, становится возможным существенно снизить необходимость в непосредственном участии человека. Это не просто оптимизация существующих протоколов, а создание систем, способных самостоятельно формулировать гипотезы, планировать эксперименты, анализировать полученные данные и даже адаптировать исследовательскую стратегию в зависимости от результатов. В результате, темпы научных открытий потенциально могут быть значительно ускорены, позволяя решать сложные задачи в различных областях науки, от материаловедения до биологии, с беспрецедентной скоростью и эффективностью.
Разработка роботизированных лабораторий, функционирующих на базе передовых технологий искусственного интеллекта, открывает новую эру в научном исследовании — эру автономных открытий. Эти системы, объединяющие в себе возможности больших языковых моделей, виртуального моделирования и визуально-языкового анализа, способны самостоятельно планировать эксперименты, проводить измерения и интерпретировать результаты с минимальным участием человека. Автоматизация исследовательского процесса позволяет значительно ускорить темпы научных разработок, освобождая ученых от рутинных операций и позволяя им сосредоточиться на более сложных задачах и творческом анализе данных. Подобные роботизированные комплексы демонстрируют потенциал для проведения непрерывных экспериментов, оптимизации параметров и выявления закономерностей, которые могли бы остаться незамеченными при традиционном подходе, предвещая прорыв в различных областях науки, от материаловедения до биологии.
Данное достижение знаменует собой существенный шаг к созданию полностью автоматизированных исследовательских рабочих процессов, открывая перспективы для прорывных открытий в различных научных областях. Автоматизация позволяет значительно ускорить темпы научных исследований, освобождая ученых от рутинных задач и позволяя им сосредоточиться на более сложных аспектах анализа и интерпретации данных. Подобные системы, способные самостоятельно планировать эксперименты, собирать и анализировать результаты, а также формулировать новые гипотезы, могут радикально изменить подходы к исследованиям в химии, биологии, материаловедении и других дисциплинах. Ожидается, что подобная автоматизация не только повысит эффективность научных исследований, но и позволит обнаруживать закономерности и связи, которые могли бы остаться незамеченными при традиционных методах, что приведет к новым инновациям и технологиям.
В представленной работе наблюдается стремление к элегантности в решении сложных задач автоматизации научных экспериментов. Авторы предлагают агентский плагин VLA, который, по сути, заполняет пробел в понимании состояния роботом окружающей среды, позволяя ему самостоятельно выполнять длительные последовательности действий. Это напоминает о словах Джона Маккарти: «Лучший способ сделать что-то сложным — это придумать способ сделать это сложным». Здесь же, напротив, видна попытка упростить взаимодействие робота с миром, предоставив ему возможность рассуждать и планировать действия, не требуя дополнительных этапов обучения. Именно эта способность к агентскому выводу позволяет преодолеть ограничения, связанные с ‘разрывом состояний’, и приближает нас к действительно автономным научным исследованиям.
Что дальше?
Представленная работа, безусловно, демонстрирует способность преодолеть некую пропасть — “пропасть состояний” в автоматизации научных экспериментов. Однако, иллюзия завершенности опасна. Устранение одного препятствия лишь обнажает следующие. Действительно, генерация переходных действий — необходимый шаг, но достаточен ли он? Сложность научного поиска заключается не только в последовательности операций, но и в способности к истинному пониманию, к обнаружению неожиданного. Роботизированная рука, направляемая языком, остается лишь инструментом, лишенным внутреннего компаса.
Будущие исследования, вероятно, должны сместить фокус с простого выполнения задач на развитие способности к самокоррекции и адаптации. Необходимо отойти от жесткого программирования к созданию систем, способных самостоятельно формулировать гипотезы и проверять их, даже если результат отклоняется от ожидаемого. Иначе, мы рискуем создать лишь сложные машины для тривиальных операций, а не истинных помощников в научном поиске.
В конечном счете, ценность подобной автоматизации не в скорости выполнения экспериментов, а в освобождении человеческого разума для более глубоких размышлений. Упрощение — это не всегда прогресс. Иногда, добавление лишней детали позволяет увидеть истинную красоту и сложность мира. А иногда, единственно верный путь — это путь отказа от всего лишнего.
Оригинал статьи: https://arxiv.org/pdf/2602.09430.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Внимание в сети: Новый подход к ускорению больших языковых моделей
- Химический синтез под контролем искусственного интеллекта: новые горизонты
- Внимание на границе: почему трансформеры нуждаются в «поглотителях»
- Искусственный нос будущего: как квантовая механика и машинное обучение распознают запахи
- Язык тела под присмотром ИИ: архитектура и гарантии
- S-Chain: Когда «цепочка рассуждений» в медицине ведёт к техдолгу.
- Генетическая приоритизация: новый взгляд на отбор генов
- Видео-Мыслитель: гармония разума и визуального потока.
- Наука, управляемая интеллектом: новая эра открытий
- Оптимизация квантовых схем: новый алгоритм для NISQ-устройств
2026-02-11 22:38