Автор: Денис Аветисян
Исследователи предлагают инновационную систему, позволяющую роботам генерировать более качественные данные для обучения, используя симуляции и проверку действий.
Представлен RoboCurate — фреймворк для улучшения качества синтетических данных роботов посредством верификации согласованности действий и увеличения визуального разнообразия, что приводит к повышению эффективности обучения роботов.
Несмотря на перспективность синтетических данных, генерируемых видеомоделями, для обучения роботов, их качество зачастую страдает из-за несогласованности действий. В работе ‘RoboCurate: Harnessing Diversity with Action-Verified Neural Trajectory for Robot Learning’ предложен новый фреймворк RoboCurate, который оценивает и фильтрует качество аннотированных действий, сравнивая их с результатами симуляции. Этот подход позволяет не только повысить достоверность синтетических данных, но и расширить разнообразие наблюдений за счет редактирования изображений и переноса видео, что приводит к значительному улучшению успешности обучения роботов — до +179.9% в реальных условиях. Станут ли методы верификации действий ключевым элементом в создании надежных и адаптивных робототехнических систем?
Преодолевая Разрыв Между Виртуальностью и Реальностью: Необходимость Синтетических Данных
Для обучения надежных политик управления роботами требуются огромные объемы данных, полученных в реальном мире. Сбор этих данных представляет собой значительную проблему, поскольку требует существенных временных и финансовых затрат. Каждый час работы робота в реальной среде, необходимый для сбора обучающих примеров, сопряжен с расходами на оборудование, персонал и потенциальным риском повреждений. Кроме того, получение данных в различных сценариях и условиях освещения требует повторных и трудоемких процедур, что ограничивает масштабируемость и эффективность процесса обучения. В результате, зависимость от реальных данных становится серьезным препятствием для широкого внедрения и развития автономных робототехнических систем.
Современные методы обучения роботов часто сталкиваются с проблемой обобщения, когда робот, обученный в одной среде, испытывает трудности при адаптации к новой, незнакомой обстановке или при использовании иного физического воплощения. Это связано с недостаточным объемом и разнообразием данных, используемых для обучения. Ограниченное покрытие данных приводит к тому, что робот не способен адекватно реагировать на неожиданные ситуации или незнакомые объекты, что существенно снижает его надежность и эффективность в реальных условиях. По сути, робот «заучивает» конкретные сценарии, а не приобретает способность к обобщению и адаптации, что делает его уязвимым к любым отклонениям от привычной среды. Успешное решение этой проблемы требует значительного расширения объема и разнообразия данных, используемых для обучения роботов.
Создание реалистичных синтетических данных представляет собой сложную задачу, поскольку точное воспроизведение многообразия реальных взаимодействий и визуальных проявлений требует учета множества факторов. Недостаточно просто генерировать изображения или симулировать физические процессы; необходимо воссоздать тонкости освещения, текстуры материалов, вариативность объектов и непредсказуемость поведения, которые встречаются в реальном мире. Имитация таких деталей требует продвинутых методов компьютерной графики, физического моделирования и машинного обучения, способных улавливать и воспроизводить тонкие нюансы, определяющие реалистичность. Без адекватного учета этой сложности, синтетические данные могут привести к разработке роботизированных систем, которые плохо адаптируются к реальным условиям, демонстрируя ограниченную производительность и надежность.
RoboCurate: Архитектура для Обучения Роботов на Основе Данных
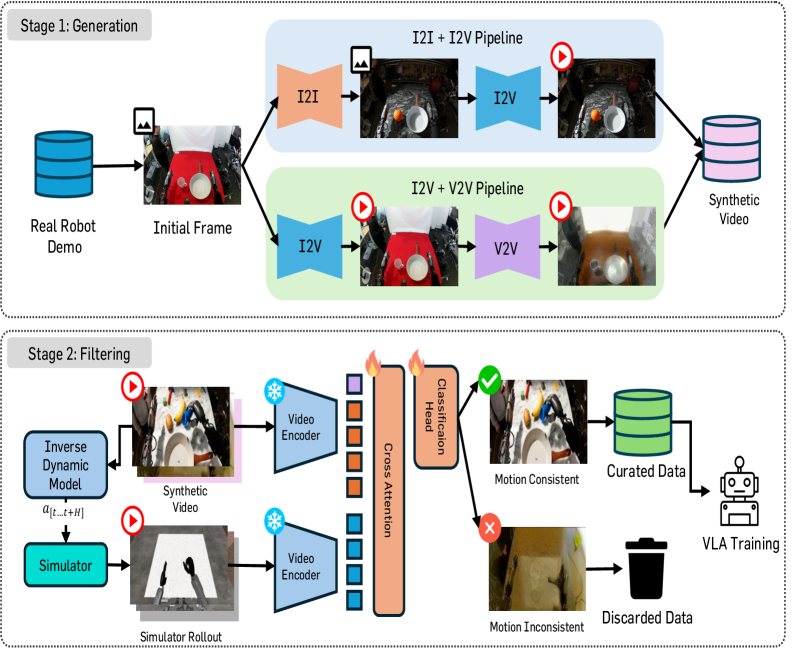
RoboCurate использует модели обратной динамики (IDM) для прогнозирования действий робота на основе видеопоследовательностей. IDM анализируют визуальные данные и реконструируют параметры управления, необходимые для выполнения наблюдаемых действий. Этот процесс позволяет генерировать псевдо-помеченные данные для обучения, где видеокадры сопоставляются с соответствующими командами управления роботом. Полученные данные используются для обучения политик робота без необходимости ручной разметки, что существенно снижает затраты и увеличивает масштабируемость процесса обучения. Точность предсказаний IDM напрямую влияет на качество сгенерированных псевдо-меток и, следовательно, на эффективность обучения робота.
В RoboCurate для создания синтетических видеороботов используются Видео-Генеративные Модели (Video Generative Models). Эти модели позволяют генерировать реалистичные видеопоследовательности, необходимые для расширения обучающих данных. Для обеспечения достоверности сгенерированных действий применяется метод “Воспроизведения в Симуляторе” (Simulator Replay). Этот метод предполагает проверку соответствия сгенерированных действий физическим законам и ограничениям робота в симуляционной среде, что позволяет отфильтровать нереалистичные или некорректные примеры и повысить качество получаемого набора данных для обучения.
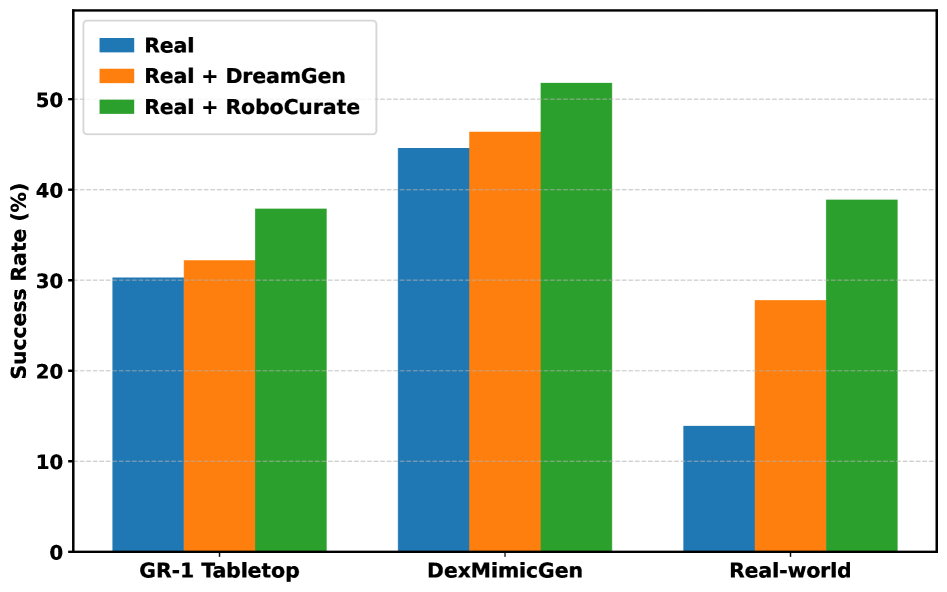
В RoboCurate комбинирование моделей обратной динамики (IDM) и симуляции обеспечивает экономически эффективное и масштабируемое решение для генерации больших объемов данных, необходимых для обучения роботов. Этот подход позволяет существенно снизить затраты на сбор данных по сравнению с традиционными методами, требующими ручной аннотации или дорогостоящего оборудования. На примере humanoid робота ALLEX, применение RoboCurate позволило достичь относительного улучшения успешности выполнения задач на +179.9% по сравнению с обучением на ограниченных наборах данных, что демонстрирует эффективность предложенного метода в повышении производительности роботов.
Повышение Реалистичности и Разнообразия Синтетических Данных
В основе предложенной системы генерации синтетических данных лежат Diffusion Transformer сети, используемые в качестве базовой архитектуры для моделей имитации динамики (IDM). Данные сети обеспечивают точное предсказание действий и генерацию плавных видеопоследовательностей благодаря механизму внимания (attention) и способности моделировать вероятностные распределения. Diffusion Transformer сети превосходят традиционные рекуррентные нейронные сети в задачах долгосрочного прогнозирования и генерации последовательностей, поскольку эффективно обрабатывают временные зависимости и позволяют избежать проблемы затухания градиента, что критически важно для реалистичной симуляции динамики сложных систем.
Для увеличения визуального разнообразия и создания вариативности сцен в синтетических данных используются методы редактирования изображений (Image-to-Image Editing) и переноса стилей между видео (Video-to-Video Transfer). Редактирование изображений позволяет изменять отдельные кадры, внося разнообразие в текстуры, освещение и объекты. Перенос стилей между видео обеспечивает изменение визуальных характеристик, таких как цветовая гамма и общий визуальный стиль, сохраняя при этом базовое содержание. Данные методы позволяют генерировать более реалистичные и разнообразные сцены, что критически важно для обучения моделей машинного зрения и робототехники.
Для обеспечения соответствия сгенерированных видео и воспроизведений симулятора используется механизм Attentive Probe. Данный механизм позволяет гарантировать правдоподобность синтетических данных, что, в свою очередь, привело к значительному улучшению производительности на эталонных тестах: на 70.1% на GR-1 Tabletop и на 16.1% на DexMimicGen. Attentive Probe отслеживает и корректирует расхождения между сгенерированным контентом и данными, полученными из симулятора, обеспечивая высокую степень согласованности и реалистичности синтетических данных.
Фундаментальные Модели и Будущее Робототехнического Интеллекта
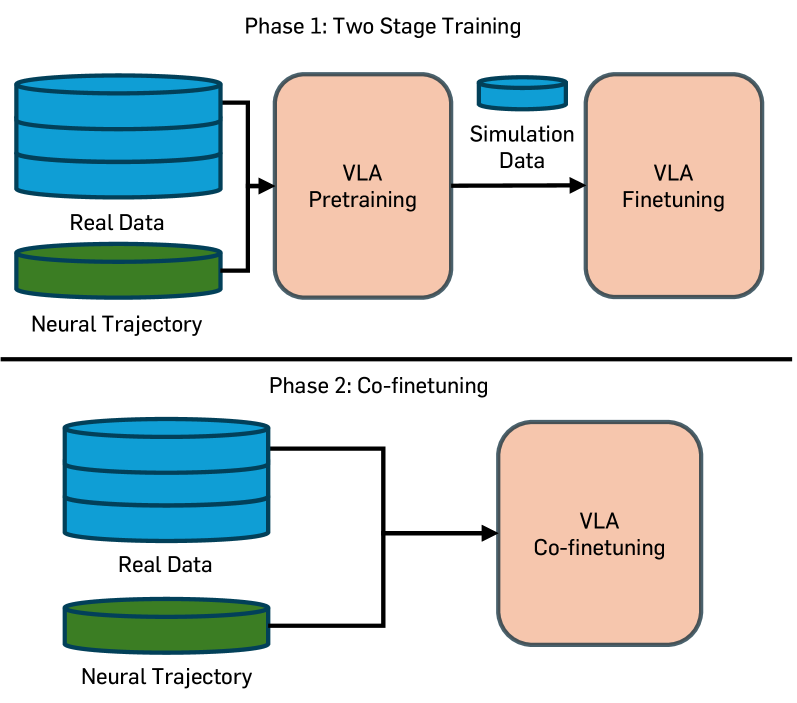
Создание синтетических данных, формирующих так называемые “Нейронные Траектории”, является ключевым фактором повышения эффективности обучения Робототехнических Фундаментальных Моделей (РФМ). Этот подход позволяет значительно расширить объемы обучающих данных, что особенно важно для сложных задач манипулирования объектами. В отличие от традиционных методов, требующих трудоемкой ручной разметки, генерация данных на основе нейронных траекторий автоматизирована и масштабируема. В результате, РФМ, обученные с использованием этих данных, демонстрируют улучшенную обобщающую способность и более высокую производительность при решении широкого спектра задач, включая манипуляции с незнакомыми объектами и в новых средах. Данная технология открывает новые возможности для создания более умных и адаптивных роботов, способных эффективно функционировать в реальном мире.
Разработанные модели-основы для робототехники, предварительно обученные на масштабных наборах данных, таких как ActionNet, демонстрируют значительное повышение эффективности выполнения задач манипулирования объектами. В частности, при совместной дообучке на гуманоидном роботе ALLEX, наблюдается стопроцентное относительное улучшение производительности. Более того, в задачах, связанных с захватом и перемещением новых, ранее не встречавшихся объектов, робот ALLEX показал относительное улучшение на 162.3%. Эти результаты свидетельствуют о том, что предварительное обучение на больших данных позволяет роботам быстрее адаптироваться к новым задачам и демонстрировать существенно более высокие показатели в сложных сценариях манипулирования.
Для повышения эффективности создания синтетических данных, используемых в обучении роботизированных моделей, активно применяются модели «зрение-язык» (Vision-Language Models, VLMs). Эти модели позволяют не просто генерировать данные, но и целенаправленно формировать их, исходя из заданных текстовых описаний и визуальных требований. Вместо случайного создания ситуаций, VLM анализирует текстовый запрос, например, «поднять красный куб», и генерирует соответствующие визуальные данные, имитирующие эту операцию. Такой подход позволяет значительно сократить объем необходимых данных для обучения, одновременно повышая их релевантность и качество, что приводит к более быстрой и эффективной адаптации роботов к новым задачам и условиям.

Представленная работа демонстрирует стремление к созданию надежных и адаптивных систем робототехники. В основе RoboCurate лежит идея улучшения качества синтетических данных посредством верификации согласованности действий, что напрямую соотносится с принципом целостности системы. Как говорил Алан Тьюринг: «Можно сказать, что машины могут думать, если они способны имитировать человеческое поведение». Данный подход, использующий проверку действий и увеличение визуального разнообразия, позволяет приблизиться к созданию роботов, способных эффективно обучаться и действовать в реальных условиях, имитируя адаптивность живых организмов. Подчеркивается важность понимания взаимосвязей между структурой данных и итоговым поведением системы, что является ключевым для успешного применения методов имитационного обучения.
Что Дальше?
Представленная работа, безусловно, демонстрирует элегантность подхода к проблеме синтетических данных для обучения роботов. Однако, возникает вопрос: оптимизируем ли мы действительно обучение, или лишь изящно обходим ограничения существующих симуляторов? Проверка согласованности действий — шаг верный, но является ли она достаточной для преодоления фундаментального разрыва между виртуальным и реальным мирами? Повышение разнообразия визуальных данных — необходимое условие, но не панацея. Остается открытым вопрос о том, как эффективно моделировать непредсказуемость реальной среды, ее шумы и аномалии.
В будущем, представляется перспективным отход от попыток создания «идеальных» симуляций в пользу разработки алгоритмов, способных адаптироваться к неточностям и неопределенностям. Необходимо исследовать возможности интеграции методов обучения с подкреплением, позволяющих роботу самостоятельно корректировать свою модель мира на основе реального опыта. Простота — не минимализм, а четкое разграничение необходимого и случайного — и в данном контексте это означает фокусировку на тех аспектах симуляции, которые действительно критичны для успешного обучения.
И, возможно, самое важное — переосмысление самой концепции «обучения». Вместо того чтобы стремиться к созданию универсальных роботов, способных выполнять широкий спектр задач, следует сосредоточиться на разработке специализированных систем, оптимизированных для конкретных областей применения. Такой подход позволит упростить задачу обучения и повысить надежность роботов в реальных условиях.
Оригинал статьи: https://arxiv.org/pdf/2602.18742.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Искусственный интеллект, планирующий путешествия: новый подход к сложным задачам
- Разделяй и Властвуй: Новый Подход к Развёртке 3D-Моделей
- Серебро и медь: новый взгляд на наноаллои
- Оживший аватар: Генерация видео в реальном времени по голосу
- Искусственный интеллект и квантовая физика: кто кого?
- Самосознание в обучении: Модель вознаграждения, основанная на самоанализе
- Огонь и Безопасность: Основы Пожарной Оптимизации
- Физика в Машинах: Проверка на Понимание Мира
- Квадрофокальное зрение: Новый подход к 3D-реконструкции
- Ловушка для антиматерии: новый дизайн стелларатора для исследований плазмы
2026-02-24 18:32