Автор: Денис Аветисян
Новая система GR-Dexter объединяет продвинутую роботизированную руку, модели обработки зрения и языка, и данные, полученные от операторов-людей, для выполнения сложных задач манипулирования.

GR-Dexter представляет собой систему с 21 степенью свободы, использующую моделирование «зрение-язык-действие» и данные телеоперации робота для достижения надежного и обобщенного двуручного манипулирования.
Несмотря на успехи моделей «зрение-язык-действие» в управлении роботами, их применение к бимануальным системам с развитыми манипуляторами остаётся сложной задачей из-за высокой размерности пространства действий и трудностей с получением данных. В данной работе, представленной в ‘GR-Dexter Technical Report’, предлагается комплексное аппаратное, программное и дата-ориентированное решение для обеспечения обобщенного бимануального манипулирования с использованием 21-градусной свободы антропоморфной руки. Ключевым результатом является система GR-Dexter, объединяющая специально разработанный манипулятор, интуитивно понятную систему телеоперации и эффективный пайплайн обучения, использующий как реальные траектории робота, так и масштабные кросс-воплощенные наборы данных. Сможет ли GR-Dexter стать практическим шагом к созданию действительно универсальных роботов-манипуляторов?
Преодолевая Границы Ловкости: Потребность в Усовершенствованных Роботизированных Руках
Современные робототехнические манипуляторы, несмотря на значительный прогресс, часто уступают человеческим рукам в тонкости и способности адаптироваться к различным объектам и ситуациям. Это ограничение существенно затрудняет выполнение сложных задач, требующих деликатности и точности, таких как сборка миниатюрных устройств, хирургические операции или работа с хрупкими предметами. В то время как человек способен мгновенно приспособить силу и хватку к конкретному объекту, роботы зачастую демонстрируют либо недостаточную чувствительность, либо избыточное усилие, что может привести к повреждению или неудаче выполнения операции. Отсутствие подобной адаптивности ограничивает применение роботов в сферах, где требуется высокая степень аккуратности и контроля.
Существующие роботизированные руки часто сталкиваются с необходимостью компромисса между тремя ключевыми характеристиками: тактильной чувствительностью (возможностью «чувствовать» силу воздействия), прочностью конструкции и компактностью. Как правило, стремление к высокой тактильной чувствительности, необходимой для деликатных операций, требует использования сложных и хрупких сенсоров, что снижает долговечность манипулятора. В свою очередь, усиление конструкции для повышения прочности и устойчивости к нагрузкам неизбежно приводит к увеличению габаритов и веса, что ограничивает возможности использования в стесненных условиях или при взаимодействии с хрупкими объектами. Такой баланс между этими факторами существенно сужает спектр задач, которые могут быть эффективно выполнены роботизированными системами в реальном мире, препятствуя их широкому внедрению в промышленности, медицине и бытовых приложениях.
Для достижения подлинной ловкости роботизированной руки необходимо сбалансировать несколько критических факторов, включая способность чувствовать приложенное усилие, прочность конструкции и ее компактность. Просто создания механически сложной руки недостаточно; требуется разработка надежных стратегий управления, позволяющих эффективно координировать движения и обеспечивать точное манипулирование объектами различной формы и текстуры. Такие стратегии должны учитывать не только кинематику руки, но и динамику взаимодействия с окружающей средой, а также способность адаптироваться к неопределенности и неожиданным препятствиям. Именно сочетание продуманной механики и интеллектуального управления открывает путь к созданию роботизированных систем, способных выполнять сложные задачи с той же легкостью и адаптивностью, что и человеческие руки.
Двуручная Платформа для Точного Управления
Разработанная бимануальная система представляет собой двухручную платформу, оснащенную двумя манипуляторами ByteDexter V2. Данные манипуляторы обеспечивают надежную и точную работу при выполнении сложных задач манипулирования. Конструкция системы позволяет осуществлять одновременное управление двумя руками, что критически важно для операций, требующих координации и удержания объектов, а также для выполнения задач, невозможных для одноручных роботов. Использование двух манипуляторов ByteDexter V2 значительно расширяет возможности робота в плане сложности и разнообразия выполняемых операций.
Система оснащена набором RGB-D камер, обеспечивающих визуальное восприятие окружающей среды и сбор данных о глубине. В качестве опорной структуры используется манипулятор Franka Research 3, гарантирующий стабильность и широкий рабочий диапазон. Конфигурация с использованием Franka Research 3 позволяет выполнять сложные манипуляции с высокой точностью и надежностью, а данные, полученные с RGB-D камер, служат для построения трехмерных моделей объектов и определения их положения в пространстве, что необходимо для реализации алгоритмов управления роботом.
Платформа обеспечивает сбор многомодальных данных, включающих визуальную информацию, полученную с помощью RGB-D камер, и данные о положении и усилиях, предоставляемые манипуляторами Franka Research 3 и ByteDexter V2. Такой набор данных необходим для обучения передовых политик управления роботами, поскольку позволяет использовать различные методы машинного обучения, такие как обучение с подкреплением и имитационное обучение. Объём и разнообразие собранных данных напрямую влияют на обобщающую способность и надежность разработанных алгоритмов управления, позволяя роботам адаптироваться к различным условиям и задачам.

GR-Dexter: Модель «Видение-Язык-Действие» для Роботизированной Ловкости
GR-Dexter представляет собой VLA (Vision-Language-Action) модель, основанную на архитектуре Mixture-of-Transformers и содержащую 4 миллиарда параметров. Модель генерирует последовательности дискретных «Action Chunk» — управляющих команд — для контроля биманипуляторного робота. Такой подход позволяет эффективно управлять сложными манипуляциями, разбивая задачу на последовательность более простых действий. Использование дискретных Action Chunk упрощает процесс обучения и повышает стабильность управления роботом.
GR-Dexter использует метод обучения под названием Flow Matching в сочетании с архитектурой DiT (Diffusion Transformer) для освоения сложных манипулятивных навыков. Flow Matching позволяет модели эффективно обучаться на разнообразных данных, формируя непрерывное отображение между входными данными и желаемыми действиями. Архитектура DiT, основанная на механизмах диффузии, обеспечивает высокую способность к генерации и адаптации, что критически важно для выполнения сложных задач манипулирования в реальном времени. Комбинация этих двух подходов позволяет GR-Dexter извлекать полезную информацию из различных источников данных и обобщать полученные знания для эффективного выполнения задач.
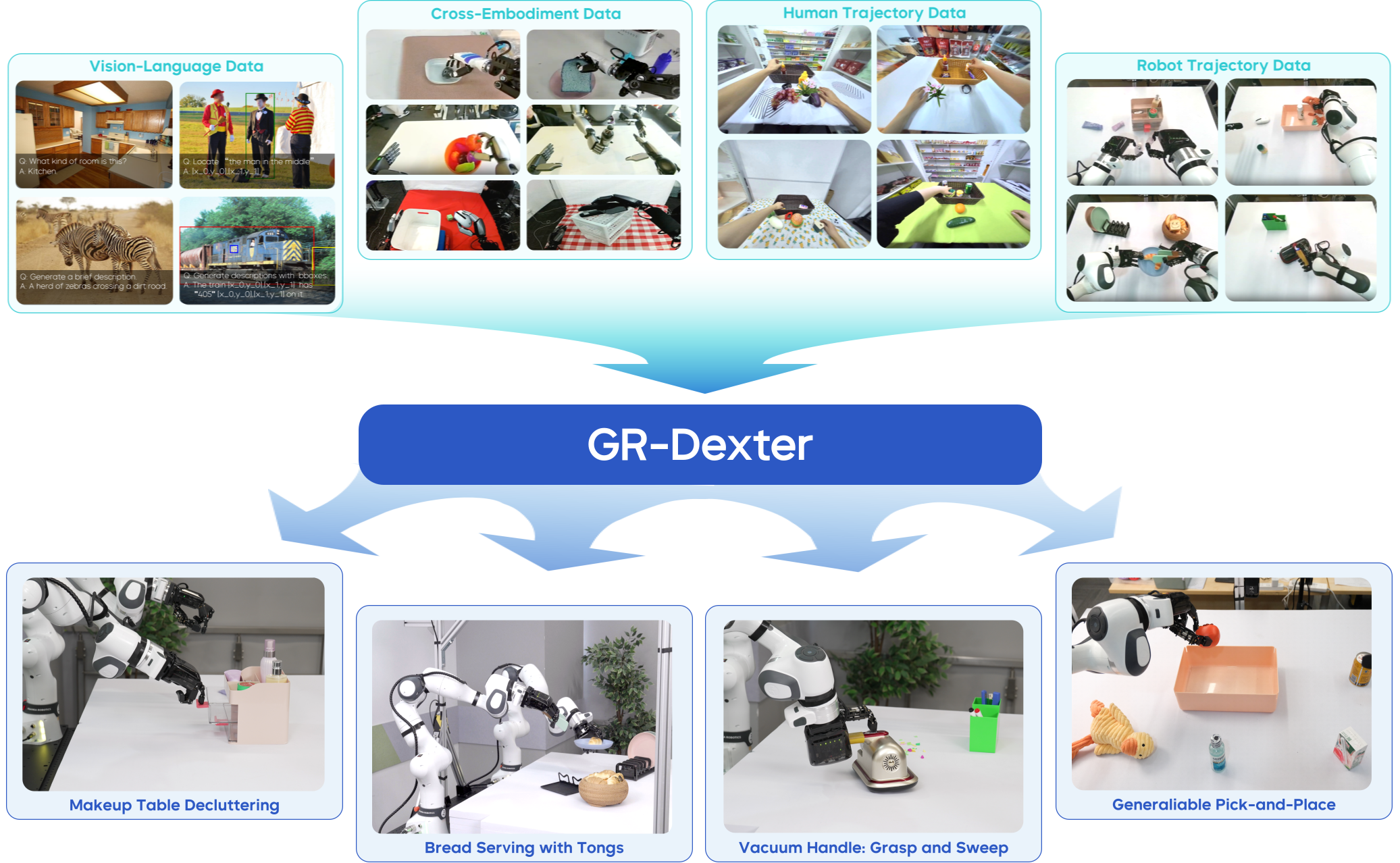
Для повышения обобщающей способности модели GR-Dexter использовались данные о траекториях движений, полученные от людей через интерфейс дистанционного управления (телеоператор). Эти данные были дополнены информацией, полученной от других роботизированных систем (cross-embodiment data), что позволило модели изучить более широкий спектр стратегий манипулирования. Такой подход позволил GR-Dexter успешно адаптироваться к новым, ранее не встречавшимся ситуациям и объектам, демонстрируя улучшенные показатели успешного выполнения задач в различных условиях.
Модель GR-Dexter использует данные, объединяющие визуальную информацию и текстовые инструкции, для интерпретации задач и выполнения манипуляций. В ходе тестирования GR-Dexter демонстрирует высокую эффективность: показатель успешного выполнения базовых задач по разбору косметики составляет 0.96, а для базовых задач захвата и перемещения объектов — 0.87. Это свидетельствует о способности модели преобразовывать человеческие намерения, выраженные в виде инструкций, в последовательность действий робота.
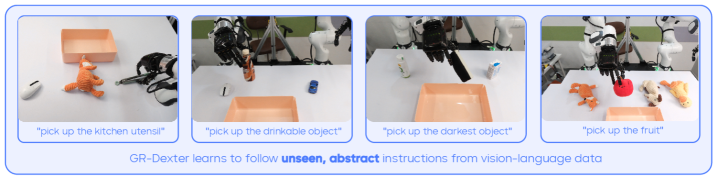
Модель GR-Dexter демонстрирует высокую способность к обобщению и адаптации к новым, ранее не встречавшимся условиям. В ходе тестирования, на задаче сортировки косметики в незнакомой обстановке, GR-Dexter достигла показателя успешности 0.89, что значительно превосходит результат обычной VLA-модели (0.64). Кроме того, при выполнении операций захвата и перемещения объектов, ранее не использовавшихся в процессе обучения, GR-Dexter показала успешность 0.85. Аналогичный показатель (0.83) был достигнут при выполнении операций захвата и перемещения с использованием новых инструкций, что подтверждает способность модели к эффективной работе в условиях изменяющейся среды и задач.
Влияние на Развитие Продвинутой Робототехники и Сотрудничество Человека и Робота
Система GR-Dexter представляет собой заметный прорыв в области робототехники, приближая возможности манипулирования объектами к человеческому уровню. Данное достижение открывает перспективы для расширения спектра задач, которые роботы способны выполнять автономно. В отличие от предыдущих моделей, GR-Dexter демонстрирует повышенную точность и адаптивность при захвате и перемещении разнообразных предметов, включая объекты сложной формы и хрупкие материалы. Такой уровень ловкости позволяет роботам эффективно работать в условиях, требующих деликатности и аккуратности, что ранее было недоступно. Развитие подобных систем имеет ключевое значение для автоматизации производственных процессов, выполнения работ в опасных средах и оказания помощи людям в повседневной жизни.
Модель GR-Dexter демонстрирует значительный прогресс в создании более естественного взаимодействия между человеком и роботом, благодаря способности объединять визуальную и лингвистическую информацию. Робот способен не только «видеть» объекты и их расположение, но и понимать устные команды и инструкции, что позволяет ему адаптироваться к различным запросам и контекстам. Такой подход выходит за рамки традиционного программирования, где каждое действие требует четко определенной последовательности команд. Вместо этого, GR-Dexter способен интерпретировать нечеткие или неполные указания, подобно тому, как это делает человек, что значительно упрощает процесс обучения и управления роботом. Это открывает возможности для создания роботов-помощников, которые смогут эффективно работать бок о бок с людьми в различных сферах, от производства до здравоохранения, обеспечивая более интуитивное и продуктивное сотрудничество.
Разработка GR-Dexter открывает новые перспективы для создания роботов-помощников, способных эффективно функционировать в сложных и неструктурированных условиях, таких как производственные цеха или медицинские учреждения. Данная работа демонстрирует возможность создания систем, которые могут адаптироваться к переменчивой обстановке и выполнять широкий спектр задач, требующих точности и ловкости. Предполагается, что подобные роботы смогут не только автоматизировать рутинные операции, но и оказывать поддержку специалистам в решении более сложных и ответственных задач, повышая производительность и безопасность в различных отраслях. Особенно актуально это для сфер, где требуется взаимодействие с нестандартными объектами и выполнение работ в ограниченном пространстве, что делает GR-Dexter важным шагом к созданию действительно универсальных робототехнических систем.
Конструкция GR-Dexter отличается высокой модульностью, что обеспечивает перспективные возможности для дальнейшего развития и масштабирования. В основе системы лежит сочетание усовершенствованного аппаратного обеспечения и эффективных алгоритмов, позволяющих легко интегрировать новые сенсоры, приводы и методы управления. Такая архитектура не только упрощает процесс модернизации, но и открывает путь к созданию роботов, способных адаптироваться к различным задачам и условиям эксплуатации. Возможность поэтапного улучшения отдельных компонентов, без необходимости полной переработки всей системы, существенно снижает затраты и ускоряет процесс внедрения инноваций, что делает GR-Dexter надежной платформой для будущих исследований в области робототехники и человеко-роботного взаимодействия.
Представленная работа демонстрирует стремление к упрощению сложной задачи манипулирования. Система GR-Dexter, объединяющая возможности зрения, языка и действий, представляет собой попытку создать интуитивно понятный интерфейс между человеком и роботом. Как говорил Алан Тьюринг: «Машины могут делать все, что может делать человек, если им дать достаточно времени». В данном случае, предоставление машине возможности понимать и выполнять сложные двуручные манипуляции — это шаг к преодолению границ возможностей робототехники. Основной акцент сделан на создании обобщенной системы, способной адаптироваться к различным задачам, что является свидетельством стремления к элегантности и практичности в проектировании робототехнических систем.
Что Дальше?
Представленная работа, хоть и демонстрирует прогресс в области ловкого манипулирования, лишь подчеркивает глубинную сложность задачи. Успех системы GR-Dexter — не триумф над сложностью, а умелое её обхождение. Очевидно, что текущие модели, опирающиеся на телеоперацию и перенос данных, ограничены качеством исходных демонстраций и вычислительными ресурсами. Иллюзия обобщения, достигнутая за счет использования больших объемов данных, может оказаться хрупкой в условиях непредсказуемой реальности.
Будущие исследования, вероятно, потребуют смещения фокуса с простого накопления данных на разработку принципиально новых алгоритмов обучения, способных к абстракции и адаптации. Вместо слепого копирования человеческих действий, роботы должны научиться понимать принципы манипулирования, а не просто способы. Ирония в том, что для достижения истинной ловкости, возможно, потребуется отказ от прямого подражания, в пользу изучения фундаментальных законов физики и механики.
Вопрос о «здравом смысле» в робототехнике остается открытым. Системы, способные к планированию и решению проблем в условиях неопределенности, потребуют не только мощных вычислительных ресурсов, но и глубокого понимания контекста и намерений. В конечном счете, истинный прогресс в области ловкого манипулирования будет заключаться не в создании более совершенных рук, а в разработке более ясных алгоритмов мышления.
Оригинал статьи: https://arxiv.org/pdf/2512.24210.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Квантовые Заметки: Прогресс и Парадоксы
- Квантовые нейросети на службе нефтегазовых месторождений
- Звуковая фабрика: искусственный интеллект, создающий музыку и речь
- Квантовые симуляторы: точное вычисление энергии основного состояния
- Квантовая криптография: от теории к практике
- Робот, который видит, понимает и действует: новая эра общего назначения
- Лунный гелий-3: Охлаждение квантового будущего
- Квантовые сети для моделирования молекул: новый подход
- Кватернионы в машинном обучении: новый взгляд на обработку данных
- Квантовые прорывы: Хорошее, плохое и смешное
2026-01-01 13:16