Автор: Денис Аветисян
Новый подход Koopman-BoxQP позволяет решать задачи нелинейного прогнозирующего управления (NMPC) в реальном времени, открывая возможности для управления высокодинамичными и сложными системами.
Представлен фреймворк, сочетающий релаксацию динамики и оптимизированный метод внутренних точек для квадратичного программирования, обеспечивающий быстродействие до килогерц.
Решение крупномасштабных задач нелинейного прогнозирующего управления (NMPC) в режиме реального времени, с частотой в килогерцах, остается сложной задачей. В данной работе, представленной под названием ‘Koopman-BoxQP: Solving Large-Scale NMPC at kHz Rates’, предложен новый подход Koopman-BoxQP, позволяющий достичь требуемой скорости за счет комбинирования релаксации динамики и специально разработанного метода внутренней точки с теплой перезагрузкой для решения получаемых квадратичных программ. Результаты численных экспериментов демонстрируют возможность решения NMPC-задач с 1040 переменными и 2080 ограничениями с частотой в килогерц. Позволит ли данный подход расширить границы применимости NMPC к еще более сложным системам и задачам?
Преодоление Сложности в Нелинейных Системах
Традиционные методы управления сложными нелинейными системами, широко распространенными в робототехнике и химической промышленности, сталкиваются со значительными вычислительными трудностями. Это связано с тем, что нелинейные системы характеризуются сложным поведением, которое трудно точно смоделировать и предсказать. Каждое изменение в системе требует пересчета, что приводит к экспоненциальному росту вычислительной нагрузки с увеличением размерности и сложности системы. В результате, применение классических алгоритмов управления становится непрактичным или даже невозможным в реальном времени, особенно в задачах, требующих высокой точности и скорости реакции. Поиск эффективных методов снижения вычислительной сложности является ключевой задачей для обеспечения надежного и безопасного управления такими системами.
Прогностическое управление на основе модели (NMPC) представляет собой эффективный подход к управлению сложными нелинейными системами, однако его практическое применение ограничено вычислительной сложностью. Суть проблемы заключается в необходимости многократного решения нелинейных задач оптимизации на каждом шаге управления. Этот процесс требует значительных вычислительных ресурсов и времени, что препятствует масштабированию NMPC для систем с высокой размерностью или жесткими требованиями к скорости отклика. В результате, несмотря на теоретическую привлекательность, реализация NMPC в реальном времени для сложных промышленных процессов, таких как робототехника или химическое производство, остается сложной задачей, требующей разработки методов снижения вычислительной нагрузки и повышения эффективности алгоритмов оптимизации.
Эффективное представление и использование внутренней динамики нелинейных систем является ключевой задачей для снижения вычислительных затрат. Традиционные подходы часто сталкиваются с трудностями при моделировании сложных взаимодействий, что приводит к экспоненциальному росту требуемых ресурсов. Исследования направлены на разработку методов, позволяющих выявить и использовать присущие системе закономерности, например, путем аппроксимации нелинейных функций более простыми моделями или применения методов понижения размерности. Такой подход позволяет существенно сократить время вычислений, необходимое для управления системой в реальном времени, что особенно важно в таких областях, как робототехника и химическая промышленность. В частности, изучаются способы представления динамики в виде компактных выражений, например, с использованием ℝ<sup>n</sup>-векторов или матриц, что облегчает их обработку и позволяет применять эффективные алгоритмы оптимизации.
![Система управления на основе Koopman-BoxQP успешно отслеживает изменяющийся во времени пространственный профиль нелинейной системы KdV, обеспечивая соблюдение ограничений на состояние и управляющие воздействия <span class="katex-eq" data-katex-display="false">[-1, 1]</span>.](https://arxiv.org/html/2602.18331v1/x4.png)
Оператор Купмана: Новый Взгляд на Нелинейную Динамику
Оператор Купмана предоставляет мощный инструмент для преобразования нелинейной динамики в, потенциально, бесконечномерное линейное пространство. Это преобразование позволяет применять стандартные методы линейного управления к нелинейным системам. Суть подхода заключается в представлении динамики системы как линейного оператора, действующего на пространство наблюдаемых величин. Вместо анализа нелинейных уравнений движения, анализируется линейный оператор Купмана, что значительно упрощает задачу разработки стратегий управления и прогнозирования поведения системы. Эффективность метода зависит от выбора базисных функций, используемых для аппроксимации оператора Купмана, и от качества данных, используемых для его идентификации.
Аппроксимация оператора Купмана с использованием методов, основанных на данных, таких как расширенная динамическая декомпозиция (EDMD), позволяет создавать вычислительно эффективные модели нелинейных систем. В отличие от прямого моделирования нелинейностей, EDMD использует данные для построения линейного оператора, действующего в бесконечномерном пространстве наблюдаемых величин. Этот подход заключается в построении линейного представления динамики системы на основе измерений, что позволяет применять стандартные линейные методы анализа и управления к нелинейным процессам. Вычислительная эффективность достигается за счет выбора подходящего базиса и применения методов снижения размерности, что делает возможным моделирование сложных нелинейных систем, которые трудно поддаются анализу традиционными методами.
Радиальные базисные функции (РБФ) играют ключевую роль в методе расширенной динамической модовой декомпозиции (EDMD), поскольку они определяют базисные функции, используемые для аппроксимации оператора Купмана. Выбор РБФ напрямую влияет на точность представления динамики нелинейной системы. РБФ позволяют эффективно отображать данные в пространство признаков, где динамика может быть линеаризована. Наиболее часто используемые РБФ включают гауссовские функции и полиномиальные функции, выбор которых зависит от характеристик исследуемой системы и доступных данных. Эффективность РБФ заключается в их способности локально аппроксимировать сложные нелинейные функции, обеспечивая тем самым более точное моделирование динамики по сравнению с использованием глобальных базисных функций.
Преобразование NMPC в Эффективные Квадратичные Программы
Метод Condensed MPC-to-QP представляет собой подход к непосредственной формулировке NMPC (Nonlinear Model Predictive Control) в виде задачи квадратичного программирования (QP). Ключевым элементом данного метода является использование оператора Купмана для устранения высокоразмерных наблюдаемых состояний. Оператор Купмана позволяет аппроксимировать нелинейную динамику системы линейными операторами, действующими в бесконечномерном пространстве функций состояний. Применяя этот оператор, исходная задача NMPC, оперирующая с нелинейными функциями, преобразуется в эквивалентную задачу QP, что позволяет использовать эффективные алгоритмы решения, такие как методы внутренней точки. Данный подход снижает вычислительную сложность за счет работы с более компактным представлением динамики системы.
Метод Dynamics-Relaxed Koopman-MPC повышает вычислительную эффективность за счет включения штрафного члена, основанного на модели динамики, полученной с помощью оператора Купмана, непосредственно в целевую функцию квадратичного программирования (QP). Этот подход позволяет смягчить ограничения, накладываемые точным соответствием динамической модели, и, таким образом, упростить процесс оптимизации. Штрафной член способствует поиску решения, которое не только минимизирует целевую функцию, но и приближается к траектории, предсказанной динамической моделью Купмана. В результате формируется квадратичная программа, которая может быть эффективно решена стандартными методами, такими как метод предиктор-корректор Мехротры.
Оба предложенных метода — Condensed MPC-to-QP и Dynamics-Relaxed Koopman-MPC — приводят к формированию задачи квадратичного программирования с ограничениями в виде прямоугольника (BoxQP). Эффективное решение BoxQP достигается за счет использования методов внутренних точек, в частности, алгоритма Mehrotra Predictor-Corrector IPM. На практике, это позволяет решать крупномасштабные задачи с 1040 переменными и 2080 ограничениями за время менее 1 миллисекунды, что подтверждает высокую вычислительную эффективность предложенных подходов.
Валидация и Надежность в Сложных Системах
Эффективность подходов на основе модели Коопмана к нелинейному управлению с предсказанием модели (NMPC) была успешно продемонстрирована на сложной задаче — уравнении Кортевега-де Вриса (KdV). Это нелинейное частное дифференциальное уравнение, широко используемое для моделирования различных физических явлений, таких как распространение волн и динамика жидкости, представляет собой серьезный вызов для традиционных методов управления. Успешное применение Koopman-NMPC к уравнению KdV подтверждает способность данного подхода справляться с высокой степенью нелинейности и обеспечивать эффективное управление сложными системами. Решение уравнения ∂u/∂t + 6u∂u/∂x + ∂³u/∂x³ = 0 с помощью предложенного метода демонстрирует перспективность использования линейных моделей, полученных на основе модели Коопмана, для управления нелинейными системами, открывая новые возможности для разработки продвинутых систем управления.
Обеспечение осуществимости решения является первостепенной задачей в управлении сложными системами. Подход Dynamics-Relaxed Koopman-MPC отличается наличием строгой математической поддержки, гарантирующей существование решения для поставленной задачи оптимизации. Это достигается за счет специальной формулировки задачи, позволяющей избежать ситуаций, когда оптимальное управление невозможно найти из-за ограничений или несовместимости условий. Математическая гарантия существования решения критически важна для надежной и предсказуемой работы системы, особенно в приложениях, где безопасность и точность имеют решающее значение. Такой подход позволяет не только находить решения, но и уверенно прогнозировать их поведение в различных ситуациях, что значительно повышает доверие к системе управления.
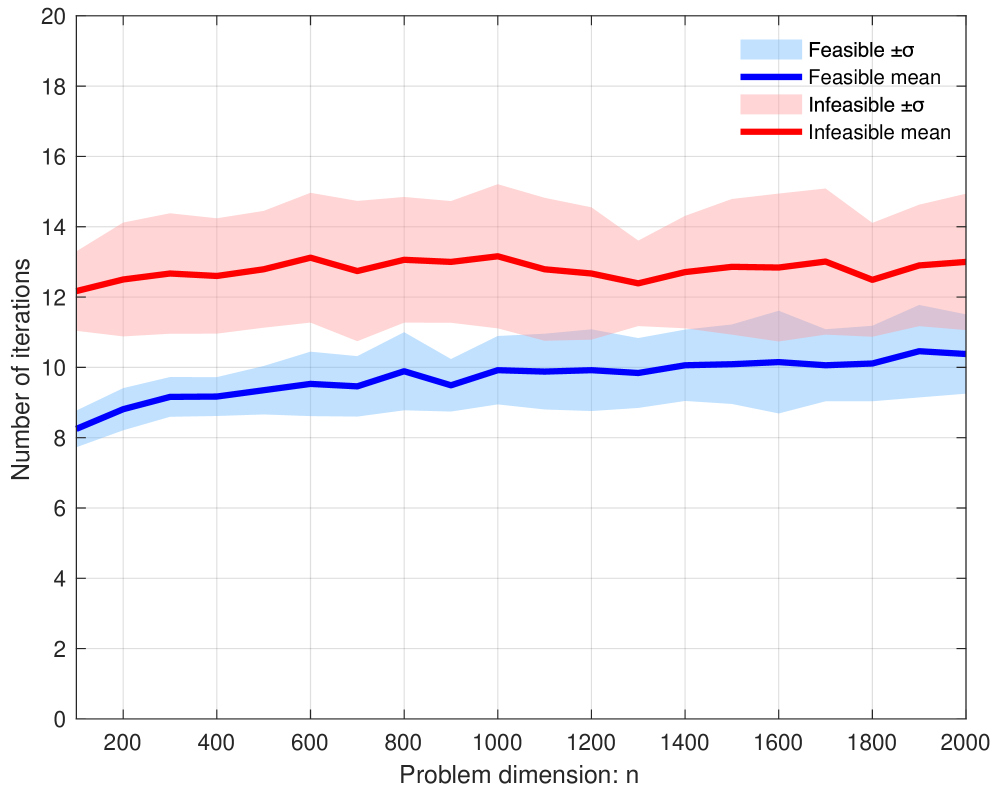
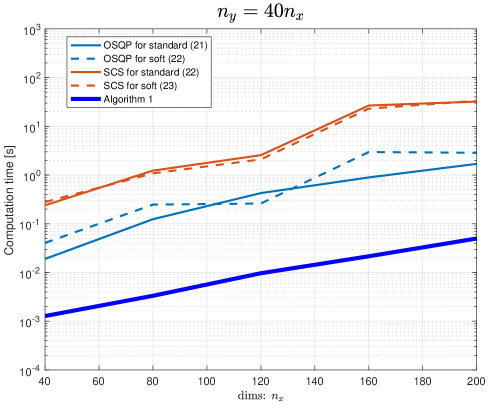
Обеспечение устойчивости и надежности сложных систем напрямую связано с соблюдением условия Липшица для описывающей их динамики. Данное условие гарантирует, что небольшие изменения во входных данных не приведут к неограниченному росту выходных, что особенно критично в приложениях, связанных с безопасностью. Предложенный подход демонстрирует высокую эффективность в решении задач на основе условий Липшица, достигая сходимости приблизительно за 10 итераций при использовании решателя IPM для получения высокоточных решений. Это представляет собой значительное увеличение скорости — примерно в десять раз — по сравнению с альтернативными решателями, такими как OSQP и SCS, что подтверждает перспективность метода для применения в системах реального времени и критически важных приложениях.
Представленная работа демонстрирует стремление к аппроксимации реальности, а не к её полному отражению. Авторы, подобно опытным математикам, не ищут идеального решения, а предлагают удобный способ приближения к нему посредством динамически-расслабленной формулировки и оптимизированного метода решения квадратичных программ. Это напоминает высказывание Конфуция: «Изучай, как будто никогда не сможешь достичь цели, и живи, как будто ты уже достиг её». По сути, Koopman-BoxQP — это не поиск абсолютной истины в управлении, а постоянная итерация проверок, ошибок и сомнений, позволяющая достичь высокой скорости работы NMPC в килогерцах. Данные не лгут, но выбор подходящей модели и алгоритма — это искусство, требующее критического подхода и осознания границ точности.
Что дальше?
Представленный подход, позволяющий достигать частоты регулирования в килогерцах, безусловно, заслуживает внимания. Однако, если взглянуть трезво, то кажущаяся элегантность любой модели — это всегда лишь временное затишье перед бурей нерешенных вопросов. Очевидно, что эффективность метода Koopman-BoxQP тесно связана с качеством аппроксимации нелинейных динамик. Если эта аппроксимация далека от реальности, то и все расчеты, какими бы быстрыми они ни были, превратятся в изящную, но бессмысленную игру цифр. Необходимо сосредоточиться на разработке более робастных и адаптивных методов построения моделей, способных учитывать неопределенности и возмущения.
Кроме того, упрощение динамики посредством релаксации, хотя и оправдано с точки зрения вычислительной скорости, неизбежно вносит погрешности. Следующим шагом представляется разработка методов оценки и компенсации этих погрешностей, возможно, с использованием методов наблюдаемости или адаптивного управления. Если результат слишком красив, чтобы быть правдой, следует проверить, не скрывает ли он за собой упрощения, которые могут оказаться критичными в реальных условиях эксплуатации.
В конечном счете, истинный прогресс в области нелинейного прогнозирующего управления (NMPC) потребует не просто увеличения скорости вычислений, а глубокого понимания природы нелинейности и разработки алгоритмов, способных эффективно работать с ней, а не обходить ее стороной. Необходимо помнить, что данные не лгут, но люди, их интерпретирующие, часто склонны к преувеличениям.
Оригинал статьи: https://arxiv.org/pdf/2602.18331.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Виртуальная примерка без границ: EVTAR учится у образов
- Реальность и Кванты: Где Встречаются Теория и Эксперимент
- Квантовый скачок: от лаборатории к рынку
2026-02-23 16:14