Автор: Денис Аветисян
Исследователи разработали инновационный подход, позволяющий восстанавливать невидимые силы, воздействующие на объекты в видео, открывая возможности для реалистичного моделирования и редактирования физических процессов.
Представлен дифференцируемый фреймворк для оценки сил и генерации физически правдоподобных видео, использующий методы обратной графики и разреженного отслеживания на базе 3D Гауссиан.
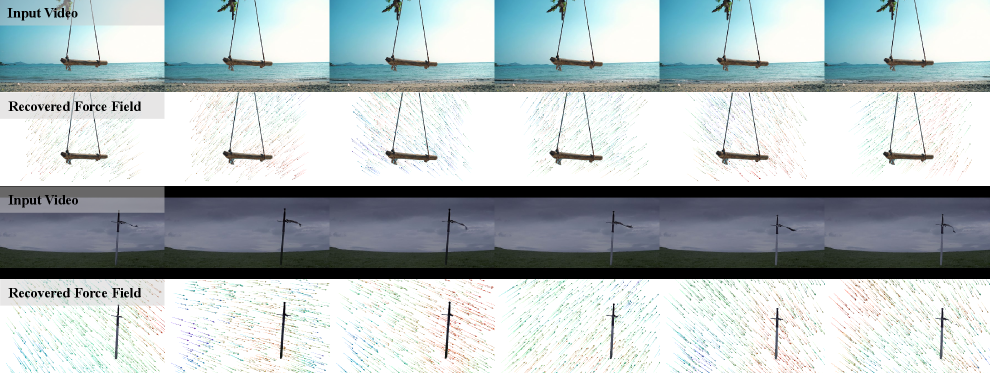
Несмотря на значительные успехи в моделировании движения объектов по видео, невидимые физические взаимодействия, определяющие это движение, остаются малоизученными. В работе, озаглавленной ‘Seeing the Wind from a Falling Leaf’, предложен новый подход к восстановлению этих невидимых сил по визуальным наблюдениям, например, к оценке ветрового поля по траектории падающего листа. Ключевой инновацией является дифференцируемая обратная графическая модель, совместно моделирующая геометрию объекта, его физические свойства и взаимодействия непосредственно из видеопотока. Открывает ли это путь к более глубокому пониманию физических процессов, скрытых за визуальной информацией, и созданию реалистичных, управляемых физикой видео?
Невидимые Силы: Вызов для Компьютерного Зрения
Традиционные системы компьютерного зрения зачастую испытывают трудности при анализе движения объектов в видео, особенно когда на него влияют невидимые силы. Проблема заключается в том, что стандартные алгоритмы, как правило, рассчитаны на предсказуемые траектории, основанные на видимых взаимодействиях. Однако, когда движение обусловлено факторами, которые не фиксируются камерой — например, воздушными потоками, магнитными полями, или даже внутренними деформациями объекта — точность интерпретации резко снижается. Это создает серьезные препятствия для развития робототехники, где необходимо предсказывать поведение объектов, и для создания реалистичных симуляций, требующих правдоподобного моделирования физических взаимодействий. Понимание этих скрытых сил является ключевым шагом к созданию действительно интеллектуальных систем компьютерного зрения, способных интерпретировать мир вокруг нас так, как это делает человек.
Определение невидимых сил, влияющих на движение объектов в видео, имеет решающее значение для широкого спектра приложений — от автономной робототехники, где необходимо предсказывать траектории и реагировать на внешние воздействия, до создания реалистичных симуляций в игровой индустрии и научных исследованиях. Однако, эта задача представляет собой значительную сложность из-за присущей ей неоднозначности и неполноты информации. Визуальные данные часто не содержат явных указаний на природу этих сил — будь то гравитация, трение, аэродинамическое сопротивление или взаимодействие с другими объектами. Поэтому, для точного восстановления динамики сцены требуется применение сложных алгоритмов, способных делать обоснованные предположения и учитывать множество факторов, что делает задачу особенно трудной в условиях реального мира с его хаотичностью и непредсказуемостью.
Существующие методы анализа видео, направленные на понимание движения объектов, часто сталкиваются с ограничениями, обусловленными необходимостью внесения сильных упрощающих предположений или ручной калибровки параметров. Это существенно снижает их применимость к реальным, сложным и динамичным сценам, где условия постоянно меняются. Например, алгоритм, обученный на видео с идеальным освещением, может демонстрировать значительные ошибки при анализе видео, снятого в условиях низкой освещенности или с наличием теней. Подобная зависимость от конкретных условий ограничивает возможности автоматизации и требует значительных усилий по адаптации каждого алгоритма к новым задачам, что делает его менее универсальным и эффективным в широком спектре приложений, включая робототехнику и создание реалистичных симуляций.

Обратное Моделирование: Восстановление Физики Движения
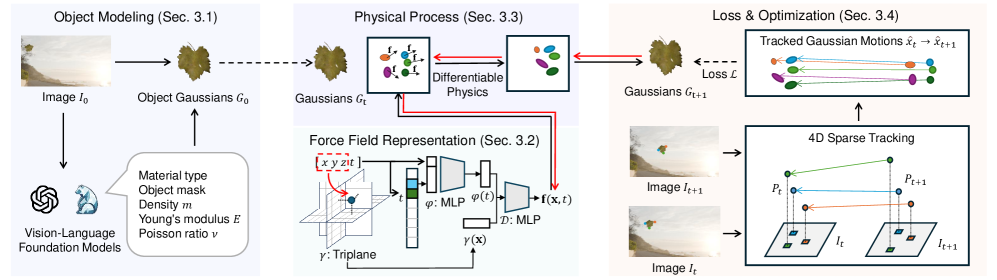
Наша платформа обратного графического моделирования использует принципы дифференцируемой физики для оценки сил, воздействующих на объекты в видеоматериале. В основе лежит возможность вычисления градиентов физических симуляций относительно параметров, определяющих движение объектов. Это позволяет оптимизировать эти параметры таким образом, чтобы смоделированное движение максимально соответствовало наблюдаемому в видео. В частности, мы используем дифференцируемую реализацию метода Material Point Method (MPM) для моделирования деформируемых тел, что позволяет нам восстанавливать как внешние силы, так и внутренние напряжения, приводящие к деформации объекта. Таким образом, система способна не только оценить величину и направление силы, но и определить, какие силы привели к наблюдаемым изменениям в форме и движении объекта.
Для реконструкции правдоподобных траекторий движения, наша система моделирует физические свойства объектов, включая форму, внешний вид, массу и модуль Юнга. Эти параметры используются в сочетании с физическим симулятором, основанным на методе материальных точек (Material Point Method), для расчета динамики деформируемых тел. Моделирование свойств позволяет системе учитывать влияние различных факторов, таких как инерция, гравитация и упругость материала, на движение объектов в видео, обеспечивая более реалистичную и физически корректную реконструкцию.
В рамках системы используется разрешенный целевой функционал отслеживания ($Sparse\ Tracking\ Objective$), повышающий устойчивость и точность оценки сил, действующих на объекты. Вместо отслеживания всей поверхности объекта, система фокусируется на движении ключевых точек. Такой подход снижает вычислительную сложность и уменьшает влияние шума, возникающего при обработке видеоданных. Концентрация на небольшом количестве значимых точек позволяет более эффективно оценивать параметры движения и реконструировать траектории, обеспечивая стабильную и достоверную оценку приложенных сил даже в сложных и зашумленных сценариях.
Представление Мира: 3D Гауссианы и Каузальные Три-Плоскости
Для эффективного представления формы и внешнего вида объектов мы используем 3D Гауссианы. В отличие от традиционных методов, таких как полигональное моделирование или воксели, 3D Гауссианы позволяют компактно описывать сложные геометрические формы с минимальными вычислительными затратами. Каждый объект моделируется как взвешенная сумма 3D Гауссианов, где вес и ковариационная матрица определяют вклад и форму каждого Гауссиана. Это представление позволяет добиться высокой скорости рендеринга и обработки, что критически важно для работы с большими и детализированными сценами в режиме реального времени. Такая параметризация особенно эффективна при обработке сцен, содержащих большое количество объектов, поскольку позволяет существенно снизить сложность вычислений по сравнению с традиционными подходами.
Представление в виде каузальных три-плоскостей (Causal Tri-Planes) позволяет моделировать динамические взаимодействия, захватывая силы, изменяющиеся как в пространстве, так и во времени. В основе лежит представление сил как непрерывных функций, определенных в трехмерном пространстве, что позволяет избежать дискретизации и связанных с ней артефактов. Каждая плоскость представляет собой векторное поле, описывающее направление и величину силы в данной точке пространства. Временная зависимость моделируется путем изменения этих векторных полей во времени, что позволяет точно воспроизводить динамику взаимодействующих объектов. Математически, это можно выразить как $F(x, y, z, t)$, где $F$ — вектор силы в точке $(x, y, z)$ в момент времени $t$. Использование три-плоскостей обеспечивает эффективное хранение и обработку этих данных, позволяя моделировать сложные физические явления в реальном времени.
Интеграция 3D Гауссианов и Каузальных Три-Плоскостей в фреймворк Обратной Графики позволяет осуществлять надежную и точную оценку сил, действующих в сцене, непосредственно из видеоданных. Фреймворк использует эти представления для реконструкции 3D-сцены и последующего анализа динамических взаимодействий. Точность оценки сил обеспечивается за счет способности 3D Гауссианов эффективно моделировать геометрию объектов, а Каузальных Три-Плоскостей — учитывать пространственно-временную зависимость сил, действующих на эти объекты. Алгоритмы фреймворка позволяют получить векторные поля сил $F(x, t)$ на основе анализа изменений в видеопоследовательности, что критически важно для задач, требующих понимания физических взаимодействий в реальном времени.
Проверка и Применение: От Симуляции к Реальности
Представленная методика продемонстрировала свою эффективность при тестировании как на синтетических данных, так и на реальных видеороликах, полученных из интернета. Исследование показало стабильные результаты в различных условиях и сценариях, что подтверждает универсальность подхода. Способность системы корректно функционировать как с искусственно созданными данными, позволяющими контролировать все параметры, так и с непредсказуемым контентом из открытых источников, свидетельствует о высокой робастности и адаптивности разработанного фреймворка. Данная устойчивость к разнообразию входных данных является ключевым фактором для успешного применения в задачах анализа и редактирования видеоматериалов, а также для создания реалистичных физических симуляций.
Разработанный метод демонстрирует высокую точность оценки сил и механических свойств материалов. При измерении плотности, средняя величина ошибки при оценке сил составляет всего 4.65%, что свидетельствует о надежности системы в определении величины воздействия. Кроме того, оценка модуля Юнга, характеризующего жесткость материала, достигается с логарифмической средней абсолютной процентной ошибкой (Log-MAPE) в 7.17%. Такая высокая точность позволяет достоверно определять характеристики объектов в видеоматериалах, открывая возможности для детального анализа и манипулирования физическими параметрами в задачах, связанных с моделированием и редактированием видео.
Исследование демонстрирует выдающиеся результаты в области классификации материалов, достигая абсолютного значения F1-score, равного 1.0. Данное достижение стало возможным благодаря использованию модели «Зрение-Язык», которая позволяет с высокой точностью оценивать физические параметры материалов непосредственно по визуальной информации. В ходе эксперимента модель успешно идентифицировала различные типы материалов, основываясь на их внешних характеристиках и взаимодействии со средой. Такая способность открывает широкие возможности для автоматизированного анализа видеоматериалов и создания систем, способных определять состав и свойства объектов без необходимости проведения физических измерений. Высокая точность классификации является ключевым фактором для применения данной технологии в таких областях, как робототехника, компьютерное зрение и анализ материалов.
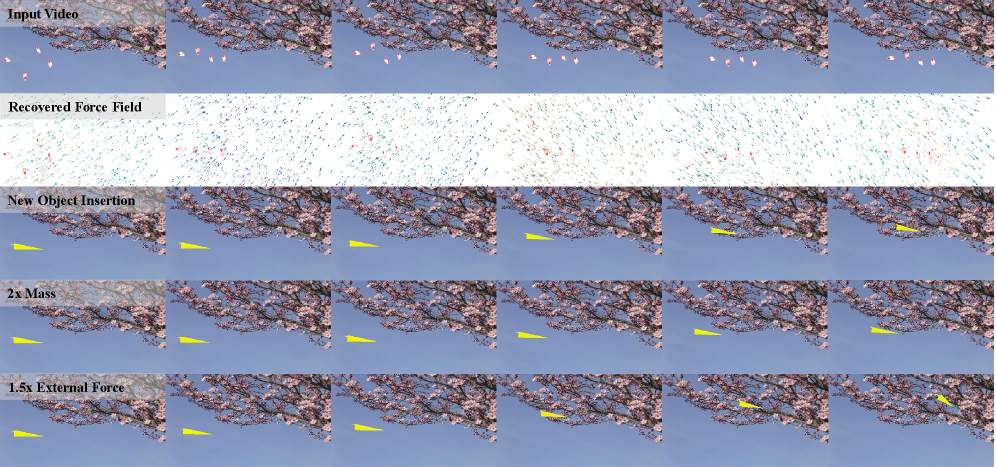
Разработанный подход открывает новые возможности в области редактирования видео, позволяя манипулировать физическими параметрами и ограничениями непосредственно внутри видеоматериалов. Становится возможным изменение свойств объектов — например, массы, жесткости или трения — с сохранением физической правдоподобности сцены. Это достигается за счет точной оценки физических характеристик объектов на видео и последующего их изменения в соответствии с заданными пользователем параметрами. В результате, можно не только изменять внешний вид объектов, но и влиять на их поведение, создавая реалистичные и динамичные видеоэффекты, которые ранее были недоступны. Такой подход находит применение в различных областях, включая создание визуальных эффектов для кино и игр, а также в научных исследованиях, связанных с моделированием физических процессов.
Предложенная система открывает возможности для генерации реалистичных видеороликов, основанных на принципах физики. Благодаря точному моделированию взаимодействия объектов и сил, система способна создавать динамичные симуляции, неотличимые от реальных процессов. В основе лежит точное вычисление сил и характеристик материалов, что позволяет генерировать видео с правдоподобным поведением объектов при различных воздействиях. Этот подход выходит за рамки простой визуализации, предоставляя инструменты для создания сложных физических симуляций, применимых в различных областях, включая развлечения, образование и научные исследования. Возможность точного контроля над физическими параметрами в процессе генерации видео позволяет создавать контент, который не только выглядит реалистично, но и соответствует заданным физическим законам.

Исследование демонстрирует элегантность подхода к решению задач, где необходимо восстановить невидимые силы, влияющие на движение объектов. Авторы предлагают дифференцируемую структуру, позволяющую точно оценивать эти силы по видеозаписи, что открывает возможности для реалистичной физически обоснованной генерации и редактирования видео. Как однажды заметил Эндрю Ын: «Мы должны стремиться к созданию систем, которые не просто работают, а и могут быть поняты и доказаны». Эта цитата прекрасно отражает суть представленной работы, где математическая точность и доказуемость алгоритма являются ключевыми аспектами, обеспечивающими надежность и предсказуемость результатов, особенно в контексте оценки сил, влияющих на движение объектов, представленных в виде 3D Гауссиан или метода Material Point.
Куда Ведет Ветер?
Без четкого определения задачи, любое решение — лишь шум, и данная работа, хотя и демонстрирует впечатляющую способность экстраполировать невидимые силы из визуальных данных, не является исключением. Необходимо признать, что текущая реализация, основанная на дифференцируемой физике и разреженных трекерах, все еще страдает от присущей ей неполноты. Восстановление сил из видео — задача, по сути, обратная, и любое решение неизбежно будет подвержено неоднозначности. Следующим шагом должно стать формальное определение границ допустимых решений, а не просто стремление к визуальной правдоподобности.
Особое внимание следует уделить проблеме масштабируемости. Текущий подход, опирающийся на 3D Гауссианы и метод материальных точек, требует значительных вычислительных ресурсов. Алгоритм должен быть доказуемо эффективным, а не просто «работать» на небольших тестовых примерах. Разработка более компактных и эффективных представлений физических симуляций, вероятно, станет ключевым направлением будущих исследований.
И наконец, необходимо задуматься о фундаментальной природе «реалистичной» физики. Воспроизведение видимого движения — это лишь часть проблемы. Истинная элегантность заключается в создании симуляций, которые не только выглядят правдоподобно, но и соответствуют фундаментальным законам физики, даже если эти законы невидимы для невооруженного глаза. В противном случае, все усилия сводятся к искусству иллюзии, а не к науке.
Оригинал статьи: https://arxiv.org/pdf/2512.00762.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Укрощение Бесконечности: Алгебраические Инструменты для Кватернионов и За их Пределами
- Сияние фотонов: новый уровень точности в предсказаниях столкновений частиц
- Эхо чёрных дыр: как квантовая гравитация меняет гравитационные волны
- Биосети в руках ИИ: Автоматизация системной фармакологии
- Трансформация нейросетей: от плотных моделей к разреженным экспертам без обучения
- Квантовые вычисления на службе беспроводной связи
- Квантовая Физика и Безопасность: Анализ Последних Новостей
- Неупорядоченные системы с неэрмитовыми эффектами
- Шёпот языков: как дрессировать цифрового голема для забытых наречий.
- Оптические Тензорные Ядра: Путь к Масштабируемым Вычислениям
2025-12-03 02:22